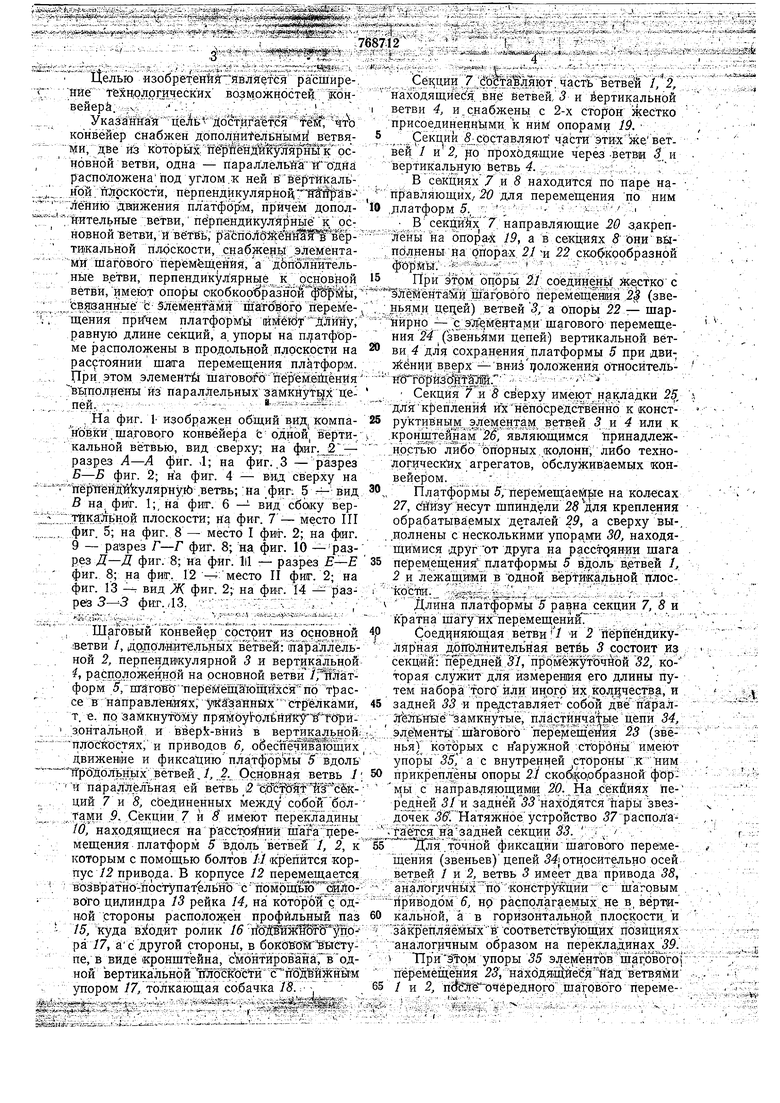
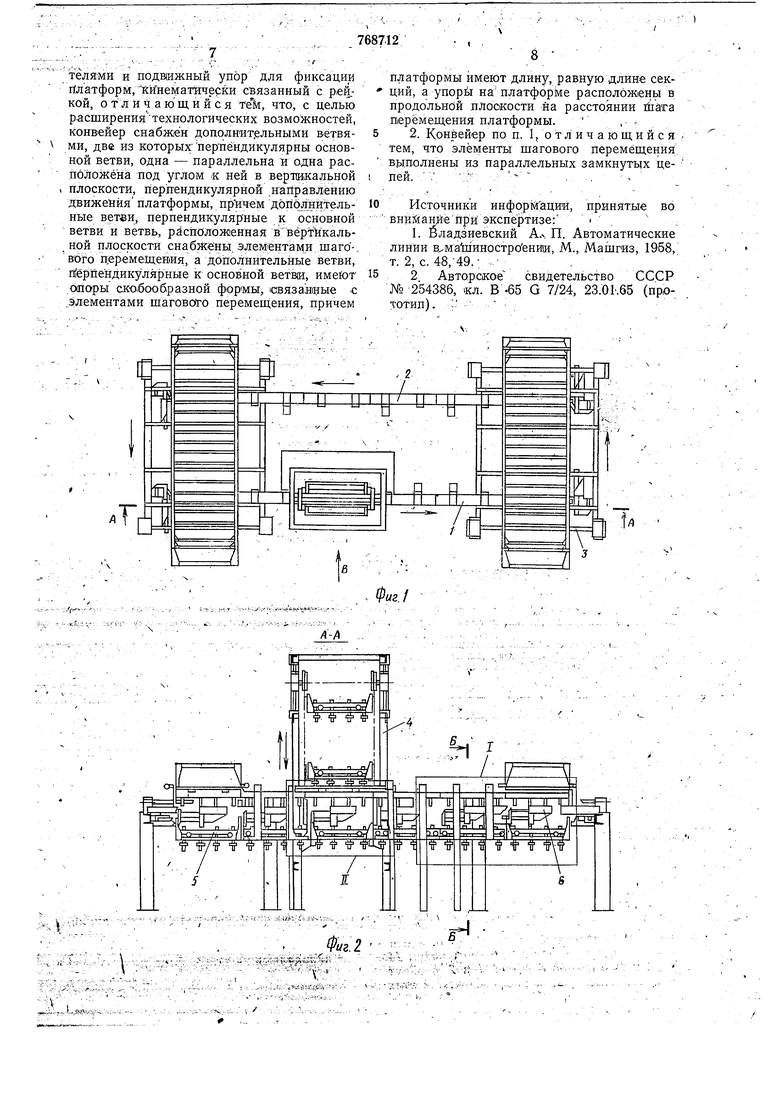
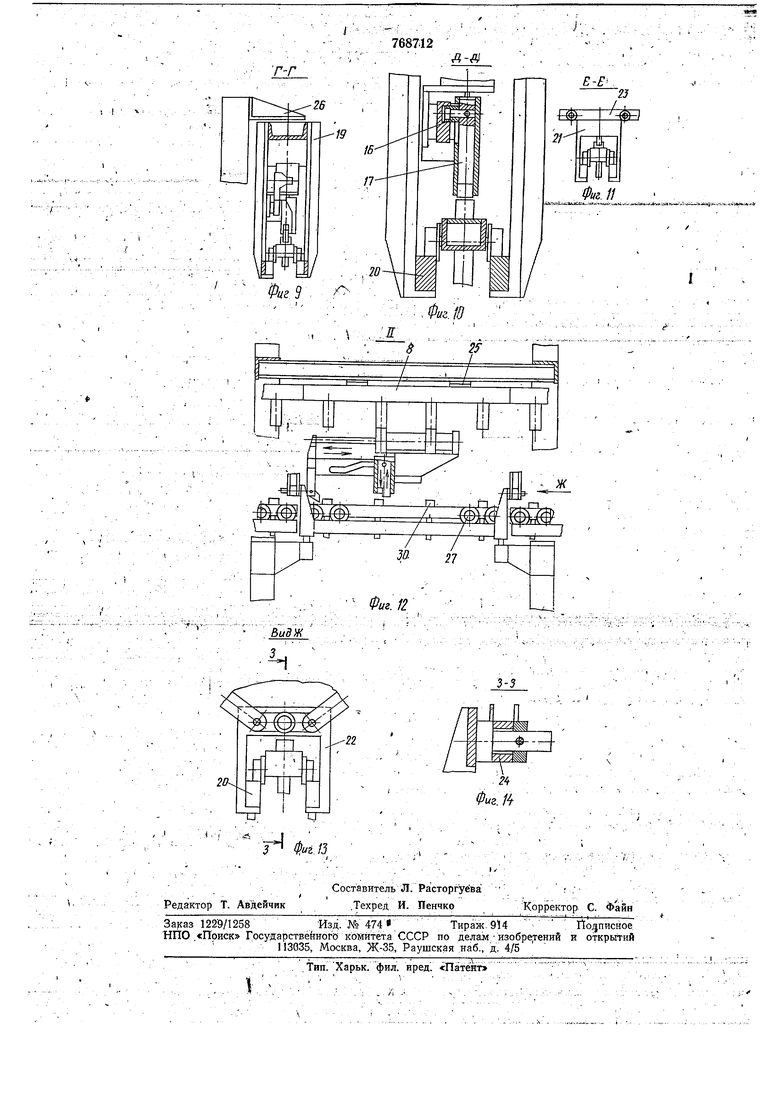
- c..ii;sfe -b /. S-fe- J г--v.Wiiivt fc.fr--- f-c,..;; 4 jiS«i. .f (i605(||ft M. -.ffff- - If ,. -7, ,i Целью изобретений является расширение тexнoлpгj чecкиx возможностей конвейерй. ч Указанная Достигается resf чт) конвейер снабжен дoпoлниteльными ветвями, две из которых пфпендикулярнй косновной ветви, одна - параллельйа iff одна расположена под углом к ней в вертикальной плоскости, перпендикулярной, ШГЙрав- лению движения платформ, причем дополнительные ветви, перпендикулярные к, основной тзетви, и ветвь, pal;noji6SfeVMFfвертвкальной плоскости, снабжены элементами щагового перемещения, а дбполиштельные ветви, перпендикулярные к основной ветви, имеют опоры окобкоо разнои , связанные с Элементами шагового цереме-, щения причем платформы имеют дЛину, равную длине секций, а упоры на ЦJJaтфЪpме расположены в продольной плоскости на расстоянии шага перемещения платформ. При этом элемент шагового цереме1 и;ения выполнены из параллельных замкнуть|х Цепей. ,-н .. .. На фиг. 1 изображен общий компанЪвки. щагового конвейера с , верти-. кальной ветвью, вид сверху; на фиу.2 -разрез А-А фиг. 1; на фиг.,3 разрез .5-5 фиг. 2; на фиг. 4- вад сверху на ;пёp :iШЯЙkyляpнy;Iй ветвь; ;на фиг: 5 вид В на. фиг. 1;, на фиг. 6 - вид ceoiKy вер тикаЖнрй плоскости; щ фиг. 7- место П1 фиг. 5; на фиг. 8- место I фиг. 2; на фиг. 9 - разрез Г-Г фиг. 8; на фиг. 10 -разрез Д-Д фиг. 8; на ф«г. Ill - разрез -Я фит. 8; на фиг. 12 --:место II фиг. 2; на фиг. 13 --7 вид Ж фиг. 2;- на фвг. 14 разрез 3--3 фиг.,13. V ; т:,:-г :;:;;;. Шаговый конвейер состоит из основной ветви /, дополнительных ветвей: параллельной 2, перпендвкулярной 5 и вертикальной , расположенной на основной ветви //Платформ 5, шгагово перемещающи хся по трассе в направлеииях, указанных стрелками, т. е. по замкнутому пряйОу -олбникуй ТО1рйз.онтальн.ой и BBepk-вниз в вepтJкaлшpй.; ттлосйбстях; и приводов 6, оёе спе Шгощих движение и фиксатциюпла.тф6рмьГ5вдоль гУродЬльньтх ветвей, 1, .2. Основная ветвь / и параллельная ей ветвь 3 W6 68flSf ceKций 7 и 8, сЬединенных между собс1 й бол: ;тами .5. .Секции. 7 и S имеют перек ладиньг W, находящиеся на расстойнии raaPa i epeмещения платформ 5 вдольветвей/, 2, к которым с помбщью болтов // «рёпйтся корпус /2 привода. В корпусе 12 перемещается ;- . . -Г ...I . ./ ,-,г,,,, -- ifef,4e«i--.--.a...; возвратно-поступат.ельно с помощью ;.|илрвого цилиндра 13 рейка 14, на кЬтдр6ис одНОЙ Стороны расположен профильный паз /5/куда вводит ролик 75ШЖЙж1Ш 6 у1ора 77, ас другой сторонь, в бокбвШ Ь1(:тупе, в виде кронштейна, cteHTHpoiaifarв одной вертикальной 1роОШс®°чГгЩ11я упором /7, толкающая со.бачка 13.-- jfc Г Ji. i;;i2;W l..i - ±fftrt 5fei -v,i , ,- i ч 7 боста ляют частьветвей находящиеся вне йетвей с и йертикальной ветви 4, и снабжены с 2-х сторон жестко присоединенными к ним онорами 19. Секции 8 составляют части этих же ветвей / и 2, ро проходящие через ветви 3 и вертикальную Ветвь 4. В секциях 7 и 5 находится по паре направляющих/ 20 для перемещения по ним длатформ 5. -- В секцийх 7 направляющие 20 закреплены на опора-х 19, а в секцийх 5 они выполнены на опорах 21 -и 22 скоб кообразной форйы. - i При этом опоры 21 соединеньГ жестко с элёмента и щагового перемещения 2 (звеньями цедей) ветвей 3, а опоры 22 - шарйирно - с эШмёнтами шагового перемещения 24 , (звеньями цепей) вертикальной ветви 4 для сохранения платформы 5 при двин ении вверх - вни положения относительнтГгоризонтГЛйГСекция 7 и 5 сверху имеют накладки 25, для креплений их непосредственно к конструктивным элементам ветвей 3 VL 4 или к кронштейнам 26, являющимся ИринадлежЖстъю Jili технологически агрегатов, обслуживаемь1х конвейером. Платформы 5;перемещаемые на колесах 27, несут Щпиндели 5$ для крепления обрабатываемых деталей 29, а сверху вы-, .цолнены с несколькими упора.ми 30, находяЩИ1ЙИСЯ друг от друга на pacctqянии щага перемещения платформы 5 вдоль в,етвей /, 2 и лежащими в одной вертикальной плоско сти. ;t,r, ..i ,.,1 Длина платформы 5 равна секции 7, 5 и кратна шагу их перемещенййТ Соединяющая ветви/ и 2 перпендикулярная д гголнительная ветвь 5 состоит из секций: передней 57, промежуточной 32, которая служит для измерения его длины йутем набора того или иного их количества, и задней 33 и представляет собой две паралjreSbHbie замкнутые, пластинчатые цепи 34, элементы шагового перемец ения 25 (звенья) которых с наружной сторбны имеют упоры 55, а с внутренней стороны к ним прикреплёны опоры 21 скооцсообразной формы с направляющими 20. На секциях передней 31 и задней 55 находятся пары звездочек 36. Натяжное устройство 57 располаJгaетcя нa зaднeй секции 55. . точной фиксации щатовото перемещения (звеньев) цепей 54; отн осительно осей ветвей / и 2, ветвь 5 имеет два привода 55, аналогичный по конструкции с шаговым йриводом 6, но располагаемых не в, вертакальной, а в горизонтальной плоскости и - - закрепляемых в соответствующих позициях аналогичным образом на перекладинах . ТГриэ ом упоры 55 элементов шаг;овЬго| перемещения 25, находя1 йе6яйад ветвями / и 2, п(teяrё oчepeднoгo шагового перемещения, точно фйкойруются относительно этих ветвей тем, что зажимаются между подвижнымй.упорами f(9 и собачками 4/ приводов 55. , , Ве|)тйкальная ветвь 4 представляет со- 5 бой две параллельные замкнутые тягбвьтё цепи 42, элементы шагового перемещения ; 24 (звенья) которых, через определенный шаг, имеют отвёрсТйя; куда ЁхОдят шины опор 22 ,окОгбообра.З:й10Й фарады € -закреп- .10 леннымя на них направляющими 20. Опоры 22 образуют с элементами шагового перемещения 24 (звеньями) цепей 42 шарнирные соединение (цапфы), благодаря чему платформы5, находящиеся на направляЮЩих 20, перемещаются вверх я вниз. Hie. меняя сво,его пЬ}южё1гаяотносительно горизонтали. Вертикальная ветвь 4 такжесостоит из Секций: нижней 43, промежуточной 44, которая служит для, йвменения его высоты путем набора того или иногоих колйчеСтва, и верхней 5. Нижняя секция 43 содержит в себе моторный шаговый привод 5, синхронно поворачивающий ведуцхие звездбчки 7, а верхняя Секция 45 - натяжку 48. Работа конвейера осуществляется следующим образой. Посредством силовых цилиндров 13, рейки 14 приводов 6 ветвей / и 2 отводятся в Леьоё положение и собачки 18 заходят за очередные упоры 50платформ 5, а подвижные ynopEi 77 поднимаются. Затем Силовые ЦйЛйнДры 13 передвигают рейки 14 в-правое положение и, связанные с ними кинематически, подвйжньте упоры 17 опускаются. При этом платформы 5, совершив перемещение на щаг, фиксируют-, ся, .поскольку в конце своего хоДа упоры 50 прйжимак)тся к подвижньш упорам 17 и оказываются /зажатыми между ними и собачками У5.. , .- , . -. После определенного чиСла такйх шагОвых перемещений, платформы 5, находиэшиеся в начале, по хОдудвижения, ветвей .Г и 2, полностью сойдут с направляющих 20, закрепленных на опорах 21 ветвей 3, а платформы 5, находящиеся в конце7Ш Хб Ду движения,ветвей 7 и 2, наоборот, полностью войдут на напраелйЮтйие 2 закренленные на опорах 2/ветвей 5. . Одновременно одна из платформ 5, нахадящаяся на ветви / вместе еепроходга через вертйкальйуЮ Бёт1ь ; переместится вправо и сойдет с нйправлЯЮЩйх 20, закрепленных наОйОрах 22, а ее место займет другая, следующаяйа ней, платформа 5. П.р)И указаином ра1Споло;же9Ии :платформ 5 (направляющие 20, закрепленные на опОpax 21 ветвей 5 и находящиеся в начал ветвей 7 и 2, свободны от платформ 5/а вся осгал.ьнай трасса заполйейа йми) рейкй У4 приводов 6 секций 8 ветвей 1 ц 2 отойдут в девое положение; и расфиксйруют в этих 1 J : 2 2 3 естах платформы 5, после чего ветви 3 ц совершаточередное шаговое; перемещеие (теперь Станут свободными от платформ только направляющие 20, находящиеся на онцйх ветвей ,/И) 2). / Вслед за этгйм рейки 14 остальных приодов 6 ветвей / и 2 тоже отойдут в левое положение .а затем, передвинувшись вправб;йерёмёсТяУВ{5е;йл атформы 5 вдоль трассы на очередной шаг.и зафиксирует их. .Далее циклДвиженияплатформ 5 по трассе повторяется. Поскольку каЖдая из секций 7 и 5 снабжена приводом 6, а платфо мы 5 имеют несколько упоров 30 и длйну равную длине этих секций, после каждого перемеЩёйияй1 шаг онй 0казываются зафиксированнымиедрльТвСей трассы ветвей / и 2. ..- ;, .., . . .-. Ветви 3 в ходе собственных шаг6в4 1х перемещений, переносят платформы 5 с основной ветви / на ветвь 2, чтО Ьбеспечивает их движение в горизонтальной плоскости по замкнутому прямоугольнику. Все платформы 5, последовательно приходящие на направляющие , закрепленные н,а опорах 22 вертикальной ветви 4, в процессе eroi шаговых движений, сначала перемещаются ,вверх, а затем вниз,.после чего вновь поступают на ветвь 1 и далее продолжают свой путь по трассе конвейера. Таким образом, платформьт 5 имеют возможность перемещения как в горизонтальной, так и в в ртикальйЬй плоскостях., Изображенный шаговый.конвейер ,представляетг собой наибол-ее простой вариант его компоновки, йоясряЮгций сущность конструкции. В: зависимости от конкретйото тёхнОло- гического процесса, изготовления той или ийой детали (изделия), подлежащего м.еха- , низации .или ; артоматйзацйй, ЁыйОлняётся | Соответствюущая кб1мп6н1овка указанного щаговогО конвейера. Данный .щаговый конвейер имеет следующие техншЖо-эШнЪм йчёскШ тгрёймуЩё- ства:. позв;0ляет бьгстро производить его перёкОмпбйОвку при переходе с одного вида выпускаемой продукций На другой, .что рез 1Го снЙжЗёТ на подготовку производства; достигаетсяэкономия тпроизводственнйх; площадйй, по сравнени-ю с известными. конвейерами, нспользуемьши длятех же целей, более чем раза; за сч.ет уйроЩения конструкций приводовщагового пе5ремещения- платформы, сокращаются затраты На их изготовление; Формула Изобретения .1, ,. - . ;,. ./ , 0 Шаговый конвейер для поточной линии, содержаш ий направляющие, закрепленные на .секциях ОСНОВНОЙ ветви, установленные направляющих платформы для деталей . с упорами, привод шагового перемещения 5 платформ, который имеет рейку с толкатёлями и подвижный упор для фиксации йлатформ,Кинемагичерки связанный с рей,кой, о т л и ч а ю щ и и с я теЪ, что, с целью расширения технологических возможностей, конвейер снабжен дополнительными ветвя- 5 ми, две из которыхперпёндикулярны основной ветви, одна - параллельна и одна расположёна под углом -к ней в вершкальной i плоскости, перпендикулярной направлению движеййя платформы, причем дополнитель- 10 ные ветви, перпендикулярные к основной ветви и ветвь, расположенная ввёрт кальной плоскости снабясёны. элементами шаго-. вого перемещения, а дополнительные ветви, йёрйендикулярные к основной ветви, имеют 15 .опоры ско,бооб.разной формы, (овязавдые € элементами шагово1го перемещения, причем
платформы имеют длину, равную длине секций, а упорй на платформе располОжень в продольной плоскости на расстоянии йага перемещения платформы.
2. Конвейер по п. 1, о т л и ч а ю щ и и с я тем, что элементы шагового перемещения выполнены из параллельных замкнутых цепей. . .. . . . Источники ннфор1йации, принятые во внййанйеприэкспертизе: ,
1. бладзиевский A.N П. Автоматические линии Вхма1а1иностроени|и, М., Машгиз, 1958, т. 2, с. 48,49.; ,-
2 Авторское свидетельство СССР № 254386, «л. В 65 G 7/24, 23.01.65 (прототип). : ,

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1986 |
|
SU1447726A1 |
| Шаговый конвейер | 1982 |
|
SU1084198A1 |
| ТРАНСПОРТНО-НАКОПИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2108222C1 |
| Горизонтально-замкнутый конвейер для литейных опок | 1977 |
|
SU737318A1 |
| Устройство для пакетирования кольцеобразных изделий | 1983 |
|
SU1141052A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1375531A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СБОРКИ ЗВЕНЬЕВ ПУТЕВОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2436886C1 |
| Грузопассажирская транспортная установка фролова и.в. | 1986 |
|
SU1440837A1 |
| Система для пакетирования грузов на поддоны и их транспортирования | 1985 |
|
SU1375543A1 |
| Устройство для окраски и сушки труб | 1973 |
|
SU650662A1 |
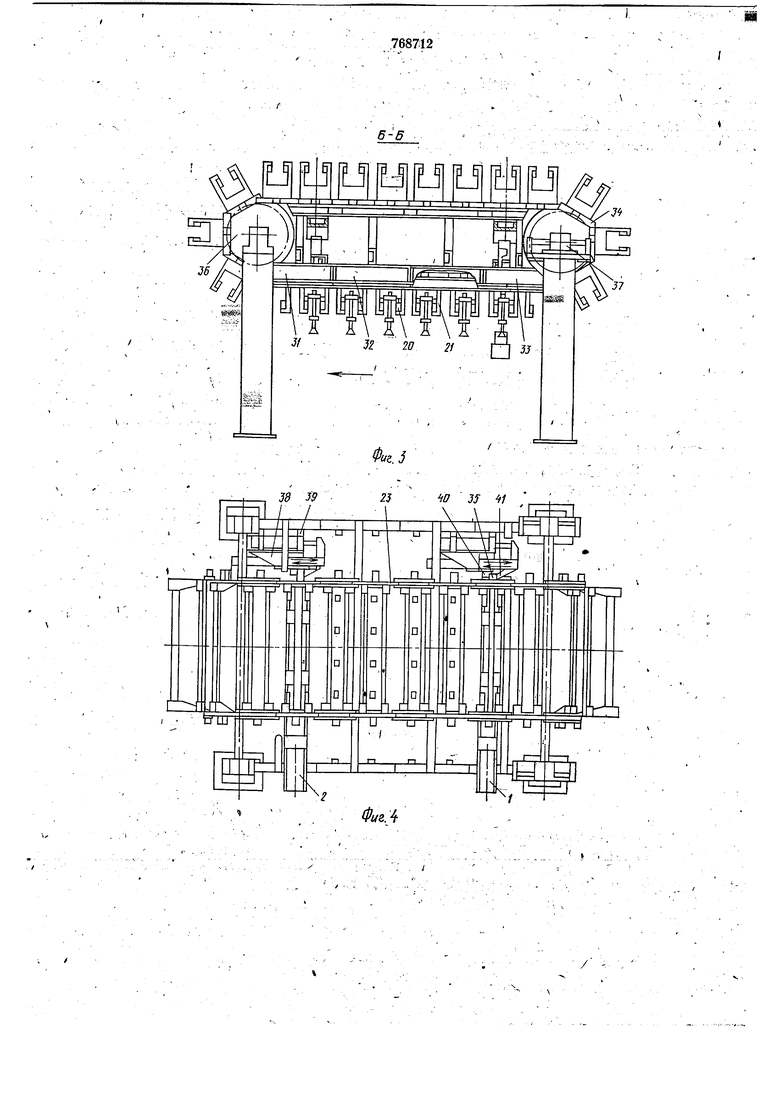

. фиг./
Фиг.4
.
Ь- д. -
