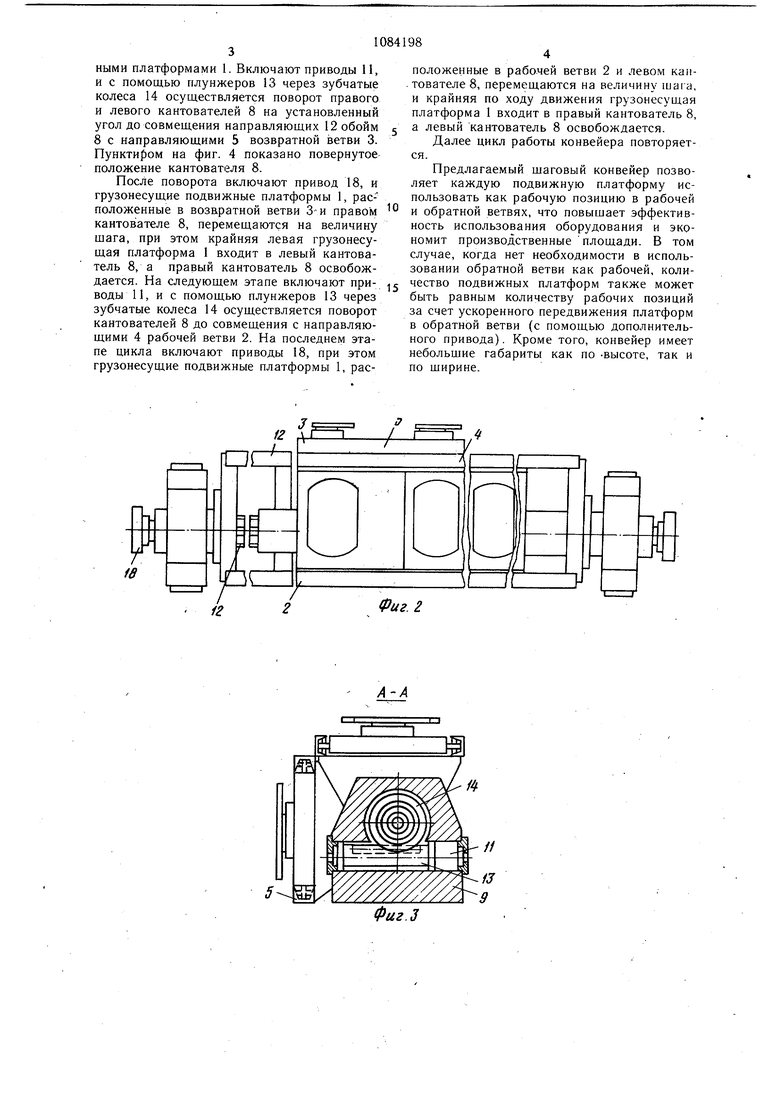
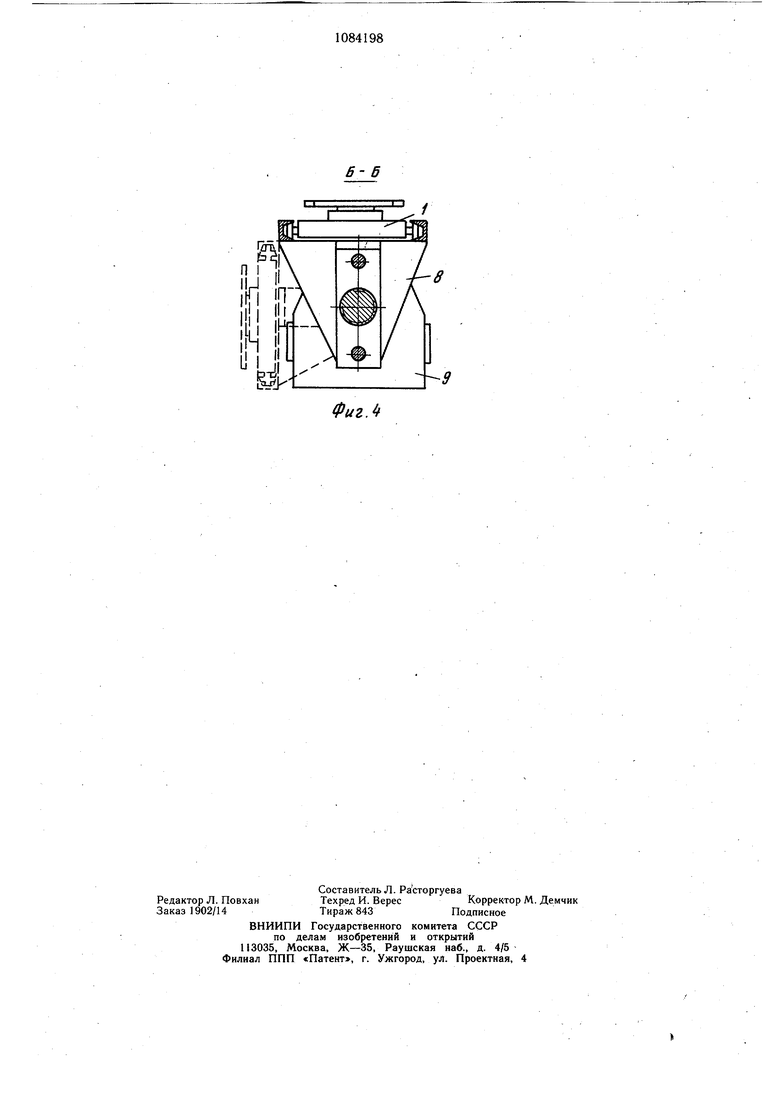
Изобретение относится к транспортирующим средствам, в частности к конвейерам поточных линий производства изделий. Известен горизонтально-замкнутый шаговый конвейер, содержащий рабочую и возвратную ветви с направляющими, на которых установлены грузонесущие подвижные платформы, механизм перемещения платформ по направляющим, имеющий щтанги с толкателями, и механизмы перемещения платформ с одной ветви на другую 1. Однако данный конвейер имеет значительные габариты, зависящие от щирины грузонесущих элементов. Кроме того, конвейер характеризуется сравнительно сложной конструкцией из-за наличия двух щтанг механизма перемещения. Наиболее близким к изобретению является щаговый конвейер, содержащий рабочую и возвратную ветви с направляющими, в которых установлены грузонесущие подвижные платформы, механизм перемещения подвижных платформ по направляющим, выполненный в виде щтанги с толкателями, и два механизма поворота платформ с одной ветви на другую, каждый из которых выполнен в виде связанного с приводом поворота кантователя с осью, параллельной направляющим 2. Недостаток указанного конвейера состоит в том, что кантователь поворачивается по стрелке до совмещения с обратной ветвью на 270°, так как поворот на 90°, по кратчайщему пути, невозможен из-за наличия щтанги с толкателями, которая пересекает кратчайщий путь поворота кантователя. Поэтому высота конвейера зависит от щирины грузонесущей платформы (платформа должна пройти под осью вращения поворотного устройства). Кроме того, конвейер имеет больщую щирину из-за наличия щтанги между рабочей и возвратной ветвями и отличается достаточно больщими габаритами. Целью изобретения является уменьщение габаритов конвейера. Указанная цель достигается тем, что в щаговом конвейере, содержащем рабочую и возвратную ветви с направляющими, в которых установлены грузонесущие подвижные платформы, механизм переме1йения подвижных платформ по направляющим и два механизма поворота платформ с одной ветви на другую, каждый из которых выполнен в виде связанного с приводом поворота кантователя с осью, параллельной направляющим, механизм перемещения подвижных платформ выполнен в виде передачи винт-гайка, расположенной соосно кантователю, при этом винт расположен между направляющими рабочей и возвратной ветвей, а кантователь снабжен жесткр закрепленными на нем направляющими для гайки. которая установлена на них с возможностью возвратно-поступательного перемещения. При этом направляющие рабочей и возвратной ветвей имеют С-образный профиль. Кроме того, кантователь выполнен с параллельными направляющими, имеющими С-образной профиль и жестко соединенными между собой. На фиг. 1 изображен щаговый конвейер, общий вид; на фиг. 2-то же, вид сверху; на фиг. 3 - разрез А-А на фиг. Г; на фй-г. 4 - разрез Б-Б на фиг. 1: Шаговый конвейер содержит грузонесущие подвижные платформы 1, установленные на рабочей 2 и возвратной 3 ветвях, имеющих соответственно направляющие 4 и 5 С-образного профиля; два механизма поворота 6 грузонесущих подвижных платформ 1 с одной ветви на другую и два механизма перемещения 7 грузонесущих платформ 1 по направляющим 4 и 5; причем на каждом краю щагового конвейера расположены механизмы поворота и перемещениягрузонесущих платформ. Механизм поворота 6 выполнен в виде кантователя 8, установленного в корпусах 9 и 10 с возможностью поворота от привода 11 на определенный угол, при этом ось вращения кантователя 8 параллельна направляющим 4 и 5. Кантователь 8 выполнен с двумя параллельными направляющими 12, имеющими С-образный профиль, жестко соединенными межДу собой и являющимися продолжением рабочей 2 и возвратной 3 ветвей конвейера для размещения в них грузонесущих подвижных платформ 1. Привод поворота 11 выполнен в виде плунжера 13, являющегося зубчатой рейкой, входящей в зацепление с зубчатым колесом 14. Механизм перемещения 7 выполнен в виде передачи винт-гайка, гайка 15 которой служит толкателем при взаимодействии с грузонесущей подвижной платформой 1 и установлена на направляющих 16, жестко закрепленных на кантователе 8, а винт 17 установлен соосно валу кантователя 8 между направляющими рабочей и возвратной ветвей 4 и 5. Гайка 15 устанЬвлена с возможностью ее перемещения по направляющим 16 на величину щага при прямом и обратном ходе грузонесущей подвижной платформы 1. Механизм перемещения 7 снабжен .приводом 18. Ограничителями перемещения силами инерции грузонесущих подвижных платформ 11 служат упоры противоположных гаек 15. Шаговый конвейер работает следующим образом. В исходном положении гайки 15 с упорами находятся вкрайне.м правом положении, а направляющие 12 кантователей 8 - в горизонтальногм положении. Рабочая 2 и возвратная 3 ветви, а также правый кантователь 8, заполнены грузонесущими подвижными платформами 1. Включают приводы 11, и с помощью плунжеров 13 через зубчатые колеса 14 осуществляется поворот правого и левого кантователей 8 на установленный угол до совмещения направляющих 12 обойм 8 с направляющими 5 возвратной ветви 3. Пунктиром на фиг. 4 показано повернутое положение кантователя 8.
После поворота включают привод 18, и грузонесущие подвижные платформы 1, расположенные в возвратной ветви 3-й правом кантователе 8, перемещаются на величину шага, при этом крайняя левая грузонесущая платформа 1 входит в левый кантователь 8, а правый кантователь 8 освобождается. На следующем этапе включают приводы 11, и с помощью плунжеров 13 через зубчатые колеса 14 осуществляется поворот кантователей 8 до совмещения с направляющими 4 рабочей ветви 2. На последнем этапе цикла включают приводы 18, при этом грузонесущие подвижные платформы 1, расположенные в рабочей ветви 2 и левом каи. тователе 8, перемещаются на величину шага, и крайняя по ходу движения грузонесущая платформа 1 входит в правый кантователь 8, а левый кантователь 8 освобождается.
Далее цикл работы конвейера повторяется.
Предлагаемый щаговый конвейер позволяет каждую подвижную платформу использовать как рабочую позицию в рабочей и обратной ветвях, что повышает эффективность использования оборудования и экономит производственные площади. В том случае, когда нет необходимости в использовании обратной ветви как рабочей, количество подвижных платформ также может быть равным количеству рабочих позиций за счет ускоренного передвижения платформ в обратной ветви (с помощью дополнительного привода). Кроме того, конвейер имеет небольшие габариты как по -высоте, так и по ширине.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1977 |
|
SU692756A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Двухъярусная конвейерная линия для изготовления изделий из бетонных смесей | 1986 |
|
SU1433807A1 |
| Установка для загрузки ацетиленовых генераторов | 1984 |
|
SU1260388A1 |
| Устройство для укладки в стопу плоских предметов | 1975 |
|
SU648432A1 |
| Перегрузочное устройство между конвейерами | 1982 |
|
SU1169906A1 |
| Устройство для уборки просыпи под конвейером | 1983 |
|
SU1159848A1 |
| Устройство для сортировки и укладки в накопители длинномерных изделий | 1986 |
|
SU1523500A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| Шаговый конвейер | 1978 |
|
SU749756A1 |
1. ШАГОВЫЙ КОНВЕЙЕР, содержащий рабочую и возвратную ветви с направляющими, в которых установлены грузонесущие подвижные платформы, механизм перемещения подвижных платформ по направляющим и два механизма поворота платформ с одной ветви на другую, каждйй из которых выполнен в виде связанного с приводом поворота кантователя с осью, параллельной направляющим, отличающийся тем, что, с целью уменьшения габаритов, мезанизм перемещения подвижных платформ выполнен в виде передачи винт-гайка, расположенной соосно кантователю, при этом винт расположен между направляющими рабочей и возвратной ветвей, а кантователь снабжен жестко закрепленными на нем направляющими для гайки, которая установлена на них с возможностью возвратнопоступательного перемещения. 2.Конвейер по п. 1, отличающийся тем, что направляющие рабочей и возвратной ветвей имеют С-образный профиль. 3.Конвейер по п. 1, отличающийся тем, а @ что кантователь выполнен с параллельными направляющими, имеющими С-образный W профиль и жестко соединенными между собой. 00 4: СО 00
/
иг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU232113A1 | |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 6962756, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
