ля связан со входом релейного элемента через выпрямитель, при этом второй вход регулятора ироизводительиости соединен через нормально разомкнутый ключ с выходом датчика веса, а через нормально замкнутый - с выходом блока формирования регулируемой коордииаты.
Введение новых элементов и связей иозволяет нри изменин сигнала задания в течение времени Тзат . равного временн задержки, отключать блок формирования регулируемой координаты от регулятора производительности, который подсоединяется непосредственно к датчику веса, и осуществлять перевод регулируемой коордннаты - расхода компонента - на новый уровень, соответствующий сигналу задания, без неререгулироваиия.
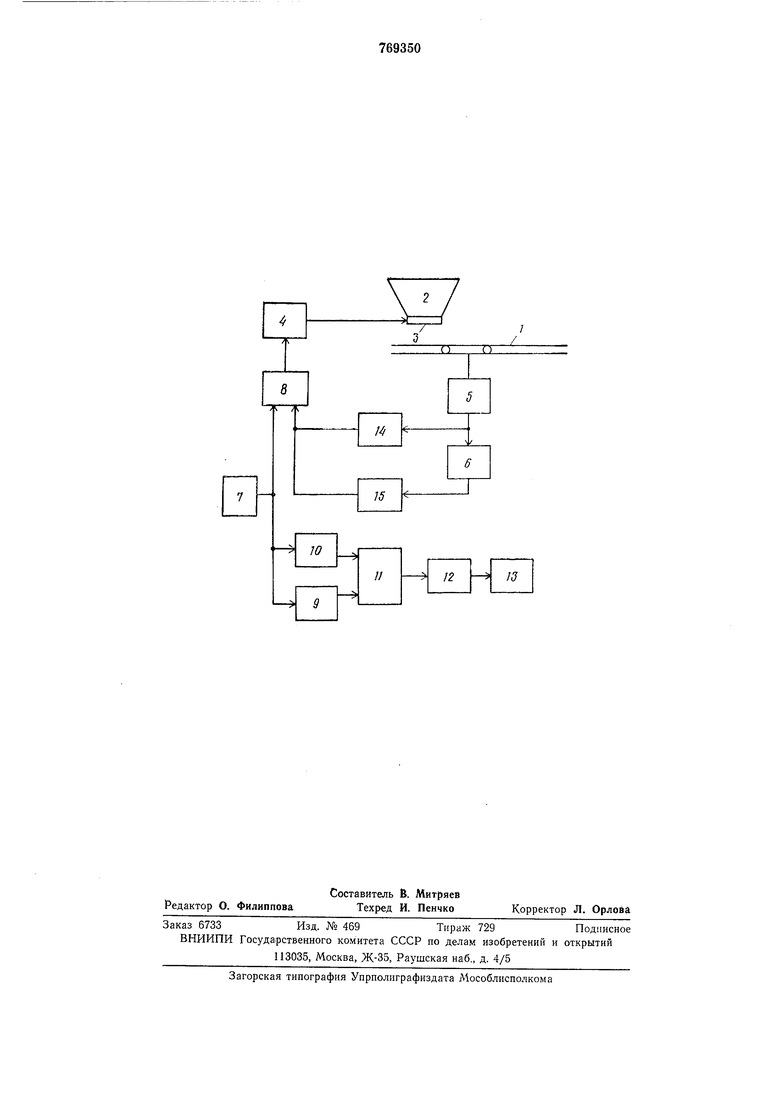
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит сборный транспортер 1, бункер 2 компонента шихты, питатель 3 с приводом 4, датчик 5 веса, блок 6 формирования регулируемой координаты, задатчик 7, регулятор производительности 8, элемент задержки 9, инвертор 10, суммирующий усилитель И, выпрямитель 12, релейный элемент 13, управляющий нормально разомкнутым 14 и нормально замкнутым 15 ключами.
Выход датчика веса 5 соединен со входами блока 6 и нормально разомкнутого ключа 14, выход которого подключен ко второму входу регулятора производительности 8. Выход блока 6 подключен ко второму входу регулятора производительности 8 через нормально замкнутый ключ 15. Задатчик 7 соединен с первым входом регулятора производительности 8, а также со входами элемента задержки 9 и инвертора 10. Выходы элемента 9 и инвертора 10 соединены со входами суммирующего усилителя И, выход которого связан со входом релейного элемента 13 через выпрямитель. Выход регулятора 8 подключен к приводу 4 питателя 3.
Устройство работает следующим образом.
В исходном состоянии ключ 14 разомкнут, а ключ 15 замкнут, на второй вход регулятора производительности 8 поступает сигнал с блока формирования регулируемой координаты. Отработка возмущений по расходу компонента осуществляется с физической компенсанией материала.
При поступлении с задатчика 7 нового
сигнала задания Хэад
V - г л ЗаД7 л зад
где лзид сигнал задания, на выходе инвертора 10 ноявляется сигнал - л; зад , а на выходе элемента задержки 9 в течение времени Тзал (время задержки)
сохраняется сигнал ЛзГд . Таким образом, на выходе суммирующего усилителя 11 имеется сигнал
X - X L.,(2)
а на выходе выпрямителя 12
х17л-х .(3)
Положительный сигнал с выхода выпрямителя 12 включает релейный элемент 13,
который разрывает цепь, соединяющую блок 6 и второй вход регулятора производительности 8 посредством нормально замкнутого ключа 15, и подключает второй вход регулятора 8 непосредственно к датчику 5
посредством нормально разомкнутого ключа 14. Такая коммутация осуществляется в течение времени Тзат (величина Тзад выбирается в 1,5-2 раза большей величины Туер), после чего сигнал на выходе элемента задержки 9 становится равным л:зад а сигнал на выходе суммирующего усилителя 11 равным нулю, и релейный элемент отключается, а ключи 14 и 15 возвращаются в исходное состояние.
Формула изобретения
Устройство для автоматического весового непрерывного дозирования компонентов
35 агломерационной шихты по авт. св. № 657267, отличающееся тем, что, с целью повышения точности дозирования, в него введены элемент задержки, инвертор, суммирующий усилитель, выпрямитель, лейный элемент, нормально разомкнзтый и нормально замкнутый ключи, причем входы суммирующего усилителя соединены с задатчиком веса, первый - через элемент задержки, второй - через инвертор, а выход суммирующего усилителя связан со входом релейного элемента через выпрямитель, при этом второй вход регулятора производительности соединен через нормально разомкнутый ключ с выходом датчика веса,
50 а через нормально замкнутый - с выходом блока формирования регулируемой координаты.
Источники информации, принятые во внимание нрн экспертизе
1. Авторское свидетельство СССР № 657267, кл. G 01 G 23/36, 1970 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Устройство для автоматического регулирования загрузки пресса | 1981 |
|
SU938909A1 |
| Система автоматического управления газотурбинной установкой | 1988 |
|
SU1539356A1 |
| Устройство для управления электроприводом одноковшового экскаватора | 1979 |
|
SU926181A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Электропривод бурового станка | 1990 |
|
SU1716065A2 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Электропривод с подчиненным регулированием параметров | 1985 |
|
SU1297202A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |