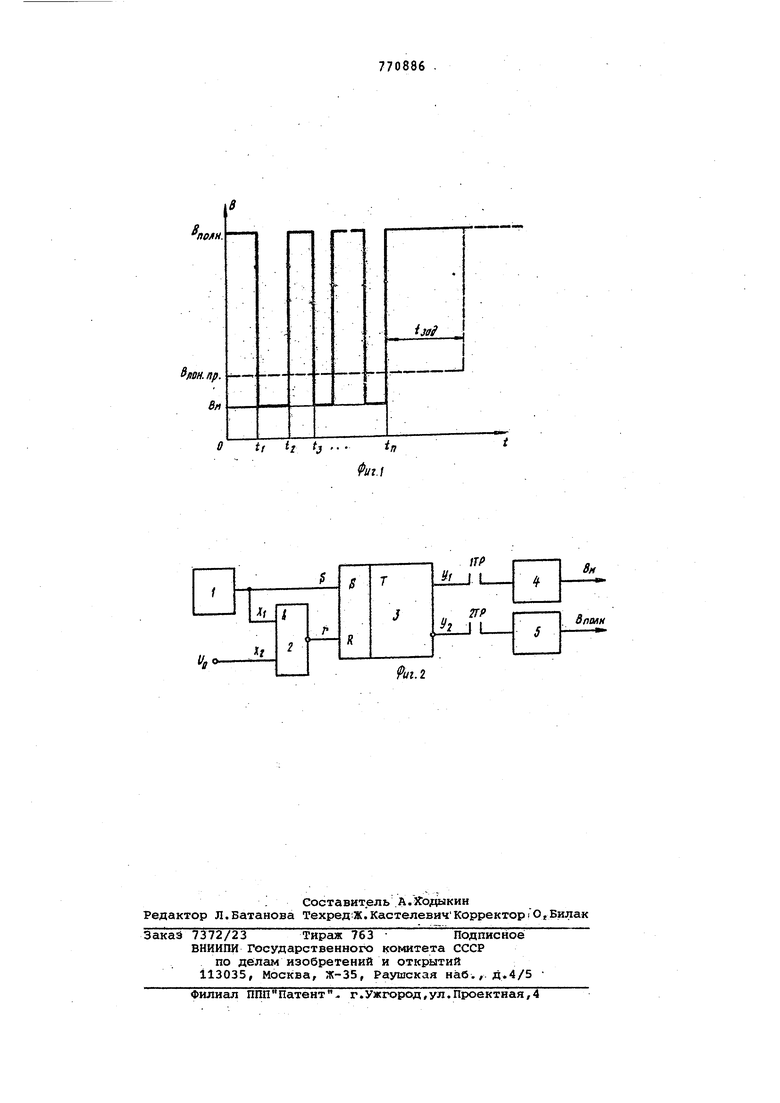
(54) СПОСОБ АВАРИЙНОГО ТОРМОЖЕНИЯ РУДНИЧНОГО СОСТАВА Изобретение относится к железнодорожному транспорту. Известен способ торможения подвижного состава, при котором тормоз включают импульсами, скважность которых устанавливают контроллером торможения . Недостатком этого способа являет ся необходимость ручной установки скважности импульсов торможения, вследствие этого эффективность тормо жения зависит от квалиЛикации и правильности действий машиниста. , Известен также способ аварийного торможения рудничного состава, заключающийся в предварительном сборе состава при пониженном тормозном усилии с фиксацией моментов соударений смежных вагонеток и окончательном торможении послепоследнего соуд рения путем приложения полного тормозного усилия . Недостатком этого спдсоба является уствиовление постоянного тормозного усилия без учета степени загрузки вагонеток к изменения прюфиля пути, что в одних условиях снижает интен-г сивность предварительного торможения а в других вызывает значительные ДИ намические усилия вдоль состава. Недостатком способа является также постоянная выдержка времени от последнего соударения вагонеток до включения окончательного полного торможения . Цель изобретения.- сокращение тормозного пути и уменьшение динамических усилий. Для этого по предлагаемому способу величину пониженного тормозного усилия формируют чередованием полного и малого тормозных усилий, при этом малое тормозное усилие прикла- , дывают в период фиксации каждого соударения, а полное тормозное усилиев промежутках между соударениями. На фиг. 1 показана схема, поясняющая предлагаемый способ; на фиг. 2 устройство для осуществления спос,о6а. В момент получения командьГ на аварийное торможение прикладывают полное тормозное усилие Вр,. и состав начинает собираться. В момент t, получения сигнала с датчика соударения, что оз-начает удар первой вагонетки о локомотив, прикладывают Величина малое тормозное усилие В
того усилия может быть выбрана еньше пониженного усилия ,црл известном способе (см.фиг.1, покаано пунктиром) , что позволит (К1ЯГить толчок и тем самым снизить опасость схода вагонетки. После прекраен ч сигнала соударения в момент t вновь прикладывают полное тормозное усилие до начала второго удара в момент t, после чего опять включацот малое тормозное усилие и так дашее, до тех пор, пока очередное приложение толного тормозного усилия в момент .tp . не будет вызывать соударений вагонеток в составе, что означает автоматический переход к окончательному торможению с полным тормозным усилием.
На фиг. 2 показана блок-схема устройства для осуществления спосдаба. Устройство состоит из датчика 1 соударения, соединенного с входом S cи мeтpичнoгo RS-триггера 3 входом логической схемы 2 реализующей функцию И-НЕ. Второй вход Х„ схемы 2 соединен с источником опорного напряжения UQ , а выход - с входом г триггера 3. Выходы триггера У YI через нормально открытые контакты 1ТР и 2ТР реле аварийного торможения соединены с исполнительными элементами 4 и 5 соответственно малого и полного тормозных усилий. УстЕ5ойство работает следукадим образом.
В исходном состоянии триггер 3 находится в устойчивом состоянии с напряжением на выходе Y, , так как на его вход г, подается сигнал от логической схемы 2. При подаче команды аварийного торможения, замыкаются контакты 1ТР и 2ТР, и напряжение с выхода Y,2 триггера 3 через контакты 2ТР подается на исполнительный элемент 5 полного тормозного усилия момент начала удара датчик 1 соударения выдает сигнал на вход S триггера 3 и на вход Х схемы И-НЕ 2, к другому входу X 2 которого постоянно приложено напряжение Up. При этом на входе схемы 2 напряжение становится равным нулю, и триггер переходит в другое устойчивое состояние, выдавая команду с выхода Y на исполнительный элемент 4 малого тормозного
усилия Bfj,,
После окончания сигнала датчика 1 соударения напряжение на входе S триггера 3 исчезает и одновременно появляется на его входе т, переводя триггер в первоначальное положение вьщачи команды с выхода У на
исполнительный элемент 5 полного тормозного усилия . в это же положение триггер переходит и в момент окончания Последнего толчка, осуществляя торможение с полным тормозным
усилием.
При применении способа достигается сокращение тормозного пути, т.е. экономический эффект может быть получен за счет увеличения расчетного
веса поезда.
Формула изобретения
Способ аварийного торможения рудничного состава, заключакядийся в предварительном сборе состава при пониженном тормозном усилии с фикса-, дней моментов соударений смежных вагонеток и окончательном торможеНИИ после последнего соударения путем приложения полного тормозного усилия, отличающийся тем, что, с целью сокращения тормозного пути и уменьшения динамических усилий,
величину пониженного тормозного усилия формируют чередованием полного и малого тормозных усилий, при этом малое тормозное усилие прикладывают в период фиксации каждого соударения, а полное тормозное усилие - в промежутках между соударениями.
Источники информации, . принятые .во внимание при экспертизе 1.Авторское свидетельство СССР 473627, кл. В 60 Т 13/66, 1970. ..2.Авторское свидетельство СССР 455879 кл. В 60 Т 8/12, 1972 {прототип) ,
8f,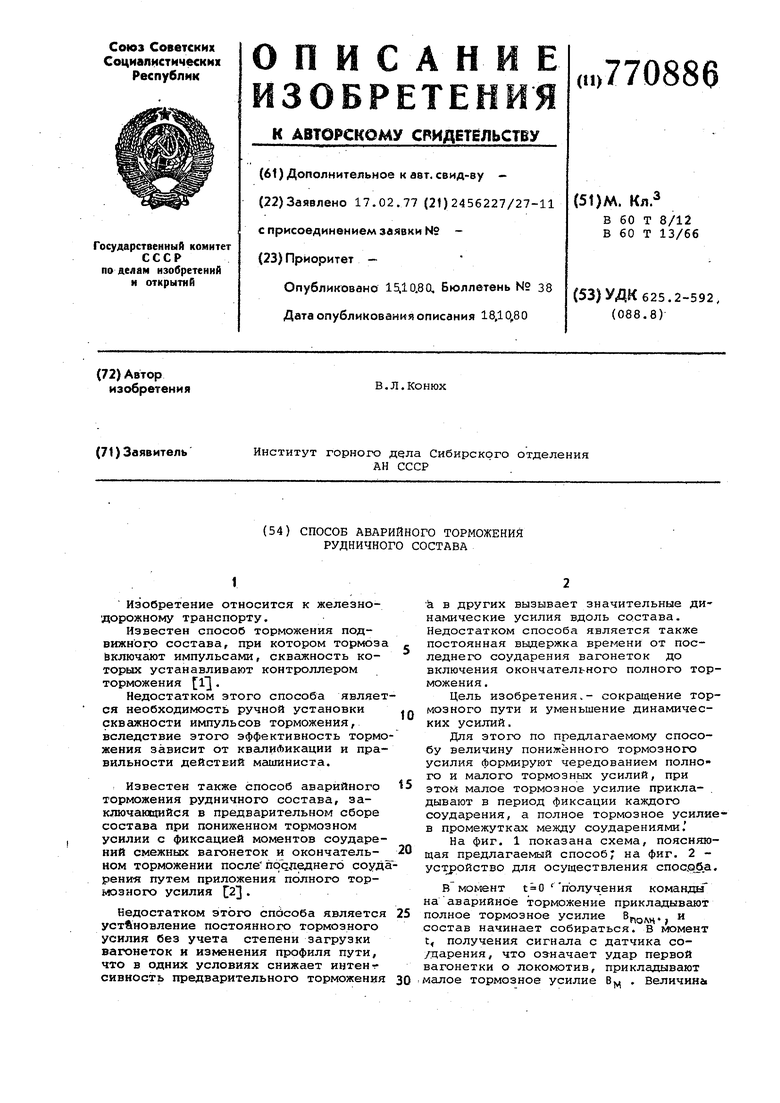
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аварийного торможения рудничного состава | 1979 |
|
SU887304A2 |
| Способ аварийного торможения рудничных составов | 1972 |
|
SU455879A1 |
| Устройство для автоматического управления электровозом | 1981 |
|
SU954267A1 |
| КАНАТНО-РЕЛЬСОВАЯ ДОРОГА (ВАРИАНТЫ) | 1998 |
|
RU2135379C1 |
| Толкатель для вагонеток с упором | 1979 |
|
SU909222A1 |
| Цепной толкатель для вагонеток с упором | 1981 |
|
SU1006780A1 |
| Устройство для улавливания шахтного транспортного средства | 1989 |
|
SU1686188A1 |
| Способ повышения безопасности транспортного средства при групповых столкновениях | 2016 |
|
RU2632238C2 |
| Толкатель для перемещения шахтных вагонеток | 1980 |
|
SU891967A2 |
| ОДНОСИСТЕМНАЯ НАПРАВЛЕННАЯ ДИСТАНЦИОННАЯЗАЩИТА | 1967 |
|
SU192283A1 |