Изобретение относится к горной промышленности и может быть использовано для улавливания рельсовых транспортных средств, свободно движущихся по наклонным горным выработкам в результате обрыва ведущего каната, разрушения прицепных, сцепных механизмов или в результате других причин, вызвавших их свободное скатывание.
Цель изобретения - повышение надежности и безопасности за счет плавного наращивания усилия торможения от нулевого до необходимого для гашения энергии движения.
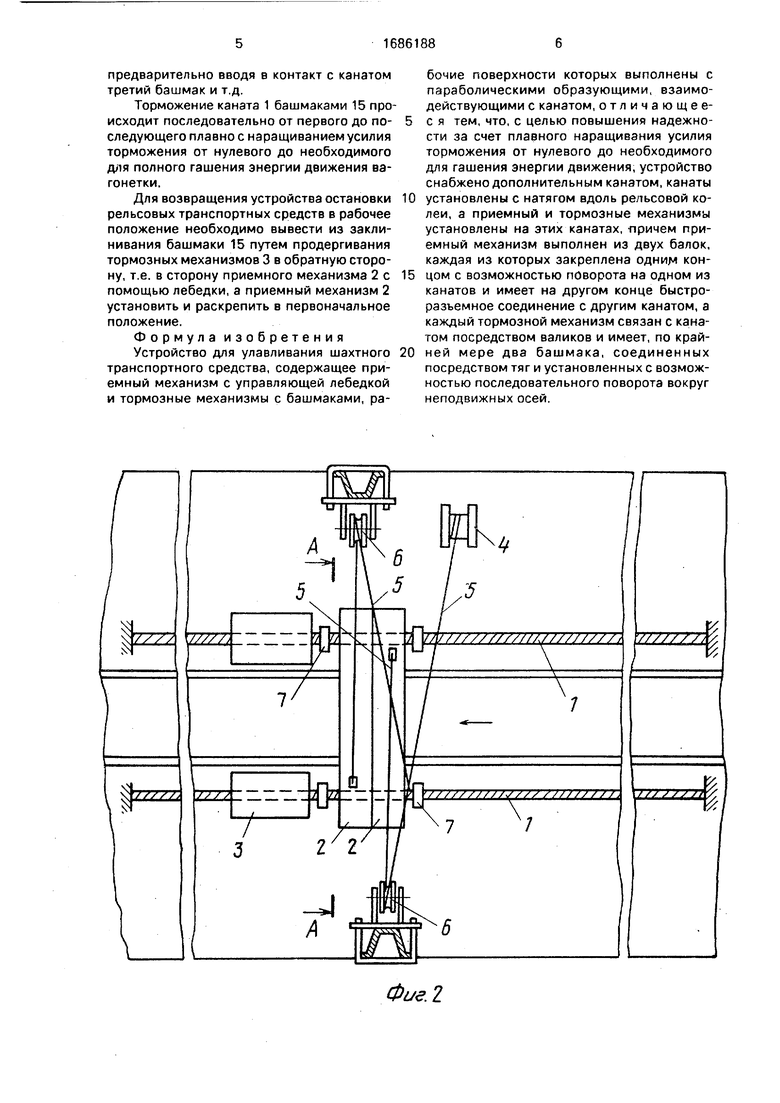
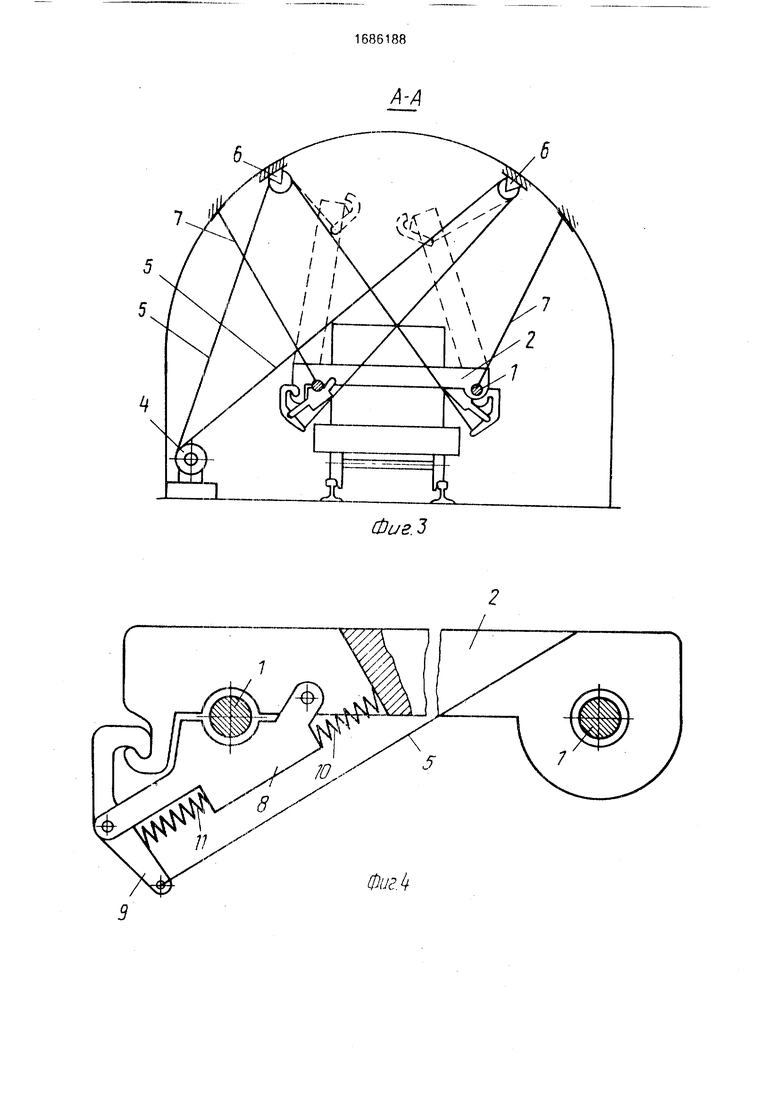
На фиг.1 изображено устройство в момент улавливания транспортного средства, вид сбоку; на фиг.2 - то же, вид сверху; на фиг.З - сечение А-А на фиг.2; на фиг,4 - элементы приемного механизма для замыкания его на канатах; на фиг.5 - тормозной механизм, вид сбоку; на фиг.6 - сечение Б-Б на фиг.5.
Устройство для улавливания шахтного транспортного средства содержит канат 1, приемный 2 и тормозные 3 механизмы. Канат 1 размещен вдоль рельсовой колеи, его концы жестко закреплены. Приемный механизм 2 управляется лебедкой 4 с помощью троса 5 через блочки 6 и выполнен из двух одинаковых балок, подвижно установленных одними концами на канатах 1. и может занимать любое место по длине каната, причем ограничивается от продольного переме- щения по канатам 1 фиксаторами 7, установленными с помощью быстроразъем- ных соединений (например, хомута со шплинтом). Другие концы балок снабжены замками 8, фиксаторами 9 и пружинами 10 и 11 (фиг.4).
Тормозные механизмы 3 установлены на канатах 1 непосредственно за приемным механизмом 2. Каждый тормозной механизм 3 (фиг.5 и 6) содержит стенки 12, соединенные болтами 13 через дистанционные втулки 14. Тормозные башмаки 15 размещены на неподвижных осях 16. На башмаках 15 расположены пальцы 17, соединенные тягами 18 с пальцами 19 соседних башмаков.
Упоры 20 ограничивают поворот башмаков 15. Весь тормозной механизм 3 подвешен на канате 1 на валиках 21. Ближний к приемному механизму башмак 15 находится в контакте с канатом 1, остальные - с зазорами. Тормозные поверхности башмаков 15 и валиков 21 выполнены в виде канавки параболической формы эксцентричной относительно осей 16.
Приемный 2 и тормозные 3 механизмы с помощью фиксаторов 7 поддерживают на
уровне центра тяжести вагонетки для сохранения ее поперечной
Устройство работает следующим образом.
Нормальное положение приемного механизма 2 - закрытое. При подходе состава вагонеток, движущихся на ведущем канате с нормальной скоростью, первая по ходу вагонетка передает команду с помощью аппаратов управления лебедке 4, которая через тросы 5 управления поднимает приемный механизм 2. После прохода состава вагонеток последней вагонеткой передается команда лебедке 4 на опускание
приемного механизма 2.
Фиксаторы 9 и замки 8 удерживаются тросами 5 управления до соприкосновения приемного механизма 2 с канатом 1. После этого замки 8 под действием пружин 10,
имеющих большую, чем пружины 11 жесткость, замыкаются на канате 1. При даль- нейшем ослаблении тросов 5 управления под действием пружин 11 фиксаторы 9 фиксируют положение замков 8 относительно
б.элок приемного механизма 2.
При обрыве ведущего каната (движение вагонетки с повышенной скоростью) выдается команда на блокирование (отключение) лебедки 4 и приемный механизм 2 остается
в закрытом положении (замкнутом на канатах).
При ударе вагонетки о приемный механизм 2 происходит перемещение последнего по канатам 1 с освобождением
фиксаторов 7 с помощью быстроразьемных соединений. Дойдя до тормозного механизма 3, приемный механизм 2 начинает перемещать его относительно канатов 1, при эгом включается первый (ближний к приемному механизму 2) башмак 15.
Ввод башмака 15 в работу осуществляется под действием сил трения между башмаком 15 и канатом 1.
Башмак 15 своей тормозной поверхносгью начинает поворачиваться относительно неподвижной оси 16, эксцентрично расположенной к поверхности трения, увеличивая прогиб каната 1 и, следовательно, усилие торможения.
0В положении башмака 15, при котором
стрелка прогиба каната 1 достигает максимальной величины, ось 16, переместившись по пазу тяги 18 до его конца, приводит в движение второй башмак. Дальнейшее про5 аорачивание башмака 15 ограничивается упором 20.
Второй башмак 15 проворачивается под действием сил трения и, выполняя работу аналогично первому, доходит до упора 20,
предварительно вводя в контакт с «анатом третий башмак и т.д.
Торможение каната 1 башмаками 15 про исходит последовательно от первого до по- следующего плавно с наращиванием усилия торможения от нулевого до необходимого для полного гашения энергии движения вагонетки.
Для возвращения устройства остановки рельсовых транспортных средств в рабочее положение необходимо вывести из заклинивания башмаки 15 путем продергивания тормозных механизмов 3 в обратную сторону, т.е. в сторону приемного механизма 2с помощью лебедки, а приемный механизм 2 установить и раскрепить в первоначальное положение.
Формула изобретения
Устройство для улавливания шахтного транспортного средства, содержащее приемный механизм с управляющей лебедкой и тормозные механизмы с башмаками, рабочие поверхности которых выполнены с параболическими образующими, взаимодействующими с канатом, отличающее- с я тем, что, с целью повышения надежности за счет плавного наращивания усилия торможения от нулевого до необходимого для гашения энергии движения, устройство снабжено дополнительным канатом, канаты установлены с натягом вдоль рельсовой колеи, а приемный и тормозные механизму установлены на этих канатах, причем приемный механизм выполнен из двух балок, каждая из которых закреплена одним концом с возможностью поворота на одном из канатов и имеет на другом конце быстро- разъемное соединение с другим канатом, а каждый тормозной механизм связан с канатом посредством валиков и имеет, по крайней мере два башмака, соединенных посредством тяг и установленных с возможностью последовательного поворота вокруг неподвижных осей.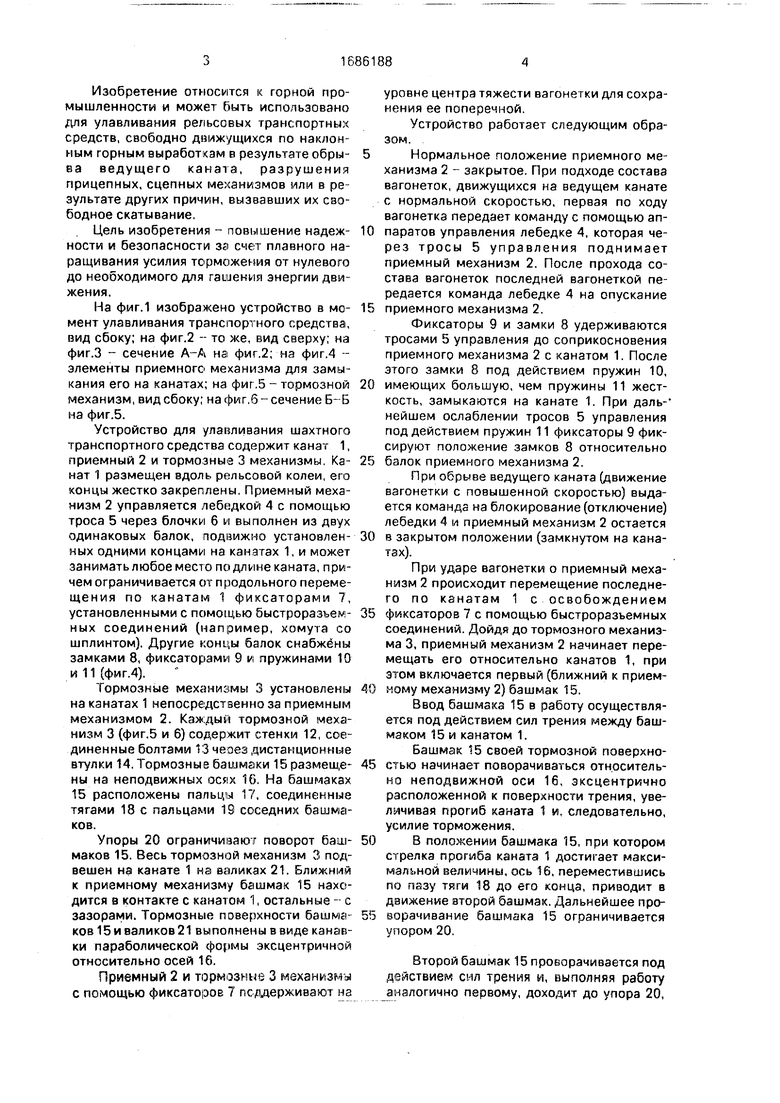
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для улавливания шахтного транспортного средства | 1990 |
|
SU1774026A1 |
| Устройство для улавливания рельсовых транспортных средств с тяговой лебедкой | 1991 |
|
SU1789734A1 |
| Устройство для перемещения вагонеток | 1987 |
|
SU1442446A1 |
| Компетсатор высоты | 1972 |
|
SU603753A1 |
| Барьер для наклонных выработок | 1982 |
|
SU1078103A1 |
| КАНАТНО-РЕЛЬСОВАЯ ДОРОГА (ВАРИАНТЫ) | 1998 |
|
RU2135379C1 |
| Устройство для обмена вагонеток в горизонтальных горных выработках | 1979 |
|
SU1211418A1 |
| Вагонетка для перевозки людей по наклонным выработкам | 1981 |
|
SU977834A1 |
| Устройство для улавливания шахтного транспортного средства | 1986 |
|
SU1395841A1 |
| УСТРОЙСТВО для УЛАВЛИВАНИЯ ВАГОНЕТОК С ЛЮДЬМИ | 1973 |
|
SU367267A1 |
Изобретение относится к горной промышленности и может быть использовано для улавливания рельсовых транспортных средств, свободно движущихся по наклонным горным выработкам в результате обрыва ведущего каната или разрушения прицепных, сцепных механизмов. Цель изобретения - повышение надежности и безопасности устройства за счет плавного наращивания усилия торможения от нулевого до необходимого для гашения энергии движения. Для этого на двух канатах (К) 1, натянутых вдоль рельсового пути, устанавливают приемный 2 и два тормозных 3 механизма. Приемный механизм (ПМ) 2 состоит из двух балок, каждая из которых установлена одним концом с возможностью поворота вокруг одного К 1 и другим концом - с возможностью быстроразъемного соединения с другим К 1. Балки управляются лебедкой 4 через К 5. За ПМ 2 на К 1 расположены тормозные механизмы (ТМ) 3 с башмаками, взаимодействующими с К 1 и установленными в ТМ 3 последовательно. При движении состава вагонеток с нормальной скоростью на лебедку 4 передается сигнал и она с помощью канатов 5 поднимает балки ПМ 2. При увеличении скорости движения состава сигнал на лебедку 4 не поступает, балки ПМ 2 не поднимаются и вагонетка врезается в ПМ 2, который при этом ударяется в ТМ 3. Башмаки последовательно начинают взаимодействовать с К 1 и состав вагонеток останавливается. Последовательное включение башмаков позволяет плавно наращивать усилие торможения. 6 ил. сл с Os со о 00 00
Фиг. 2
6
6
Фиг.З
ФигЬ
20
11
V
Фиг. 5
| Барьер для наклонных выработок | 1982 |
|
SU1078103A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для улавливания шахтного транспортного средства | 1982 |
|
SU1104304A1 |
