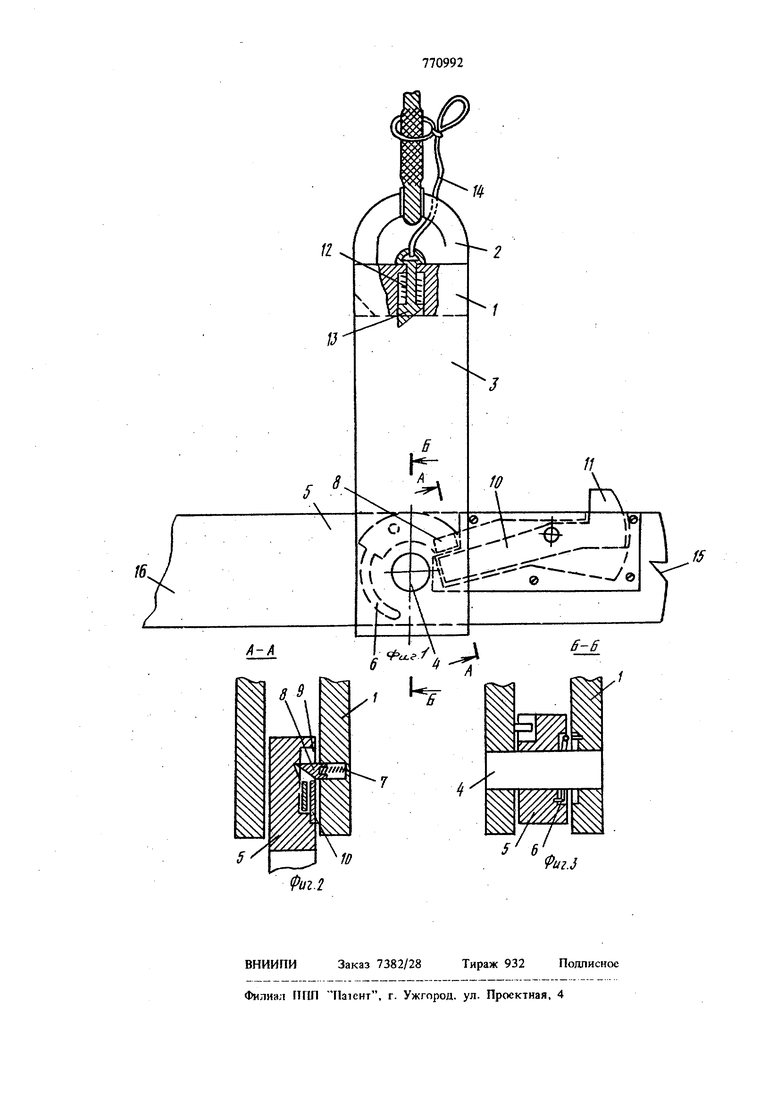
Изобретение относится к подъемно-транспорт ному оборудованию. Известно захватное устройство для изделий с центральным отверстием, содержащее корпус, имеющий в верхней части скобу для присоеданения к грузоподъемному механизму, а в нижней прорезь, в которой на оси установлен поворот а1Й опорный элемент, и механизм поворота {торного элемента П. Однако. конструкция такого устройства не обеспечивает возможность автоматического освобождения изделия. Целью изобретения является автоматизация процесса освобождения изделия, Цель достигается тем, что предлагаемое устройство снабжено фиксатором нерабочего положения опорного элемента и ограничителем поворота последнего, выполненным в виде подпружиненного пальца, установленного в одной из стенок прорези корпуса, а механизм поворота (Игорного элемента выполнен в виде пружины, закрепленной одним концом на опорном элементе, а другим в корпусе устройства, при этом в опорном элементе выполнен паз, в котором цгарнирно закреплен двуплечий рычаг для взаимодействия с подпружиненным пальцем. Фиксатор нерабочего положения опорного элемента вьшолнен в виде подпружиненного упора с управляющим тросом, установленного в верхней части корпуса. На фиг. 1 показано предлагаемое захватное уотрс«ство для изделий с центральным отверстаем, общий вид; нa;фигJ 2 - то же, сечение А-А фиг. 1; на фиг. 3 - то же, сечение Б-Б фиг. 1. Устройство содержит корпус 1, имеющий в верхней части скобу 2 для присоединения к грузоподъемному механизму, а в нижней прорезь 3, В последней на оси 4 установлен поворотный опорный элемент 5. Поворот элемента 5 осуществляет пружина 6, один конец которой закреплен на элементе, а другой в корпусе. В одной из стенок прорези корпуса установлен подпружиненный пружиной 7 палец 8, ограничивающий поворот элемента, а в элементе вьшолнен паз 9, в котором шарнирно закреплен двуплечий рычаг 10 с упором 11, предназначенный для взаимодействия с пальцем 8 и освобождения элемента 5.
В верхней части корпуса 1 установлен подпружиненный пружиной 12 упор 13 с тросом 14, являющийся фиксатором нерабочего положения элемента 5, один торец которого имеет выемку 15, а другой выступ 16.
Устройство работает следующим образом. В исходном нерабочем положении элемент 5 зафиксирован упором 13, отжимаемым пружиной 12 V выемку 15 элемента 5.
Присоединяя устройство посредством скобы 2 к грузоподъемному механизму, вводят его в отверстие изделия и освобождают элемент 5 от упора 13 за счет натяйсения троса 14. Пружина 6 поворачивает элемент 5 вокруг оси 4 до тех пор, пока благодаря пружине 7 палец 8 не утопляется в пазу 9 элемента 5 и не фиксирует erd в рабочем горизонтальном положении. После этого устройство поднимают, при соприкосновении изделия с элементом 5, изделие, надавливая на упор 11, поворачивает рычаг 10, который, преодолевая сопротивление пружины 7, выдвигает палец 8 из паза 9 и освобождает элемент 5. После этого изделие перемещают. Для его освобождения от устройства, последнее опускают в отверстие изделия и пружина 6 поворачивает элемент 5 относительно оси 4 до тех пор, пока выступ 16 не коснется упора 13. В этом положении элемента 5 устройство легко выводится из отверстия изделия. Для следующего дакла работы элемент 5 разворачивают и фиксируют в исход709924
ном положении упором 13, вводя его в выемку 15 элемента 5.
Формула изобретения
1, Захватное устройство для изделий с центральным отверстием, содержащее корпус, имеющий в верхней части скобу для присоещшения к грузоподъемному механизму, а в нижней прорезь, в которой на оси установлен поIQ воротный опорный элемент, и механизм поворота опорного элемента, отличающееся тем, что, с целью автоматизации процесса освобождения изделия, устройство снабжено фикс;атором нерабочего положения опорJ5 ного элемента и ограничителем поворота последнего, вьшолненным в виде подпружиненного пальца, установленного в одной из стенок прорези корпуса, а механизм поворота опорного элемента выполнен в виде пружины, закреплен20 ной одним концом на опорном элементе, а другим в корпусе устройства, при этом в опорном элементе выполнен паз, в котором щарнирно закреплён двуплечий рычаг для взаимодействия с подпружиненным пальцем.
25 2. Устройство по п. 1, о т л и ч а ю щ ее с я тем, что фиксатор нерабочего положения опорного элемента выполнен в виде подпружиненного уПора с управляющим тросом, установленного в верхней части корпуса.
,Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 650949, кл. В 66 С 1/66, 1976 (прототип).
il
/J
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для подъемаи КАНТОВАНия гРузОВ C уТОплЕННыМиМОНТАжНыМи пЕТляМи | 1979 |
|
SU798018A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1983 |
|
SU1127839A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| Захватное устройство для изделий с отверстием | 1982 |
|
SU1119965A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Захватное устройство | 1980 |
|
SU950657A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
.. Л
В
W
r
iHv
-K
Ч
ш
W
Pu2.2
6 6-6
5 6
9u2.i
