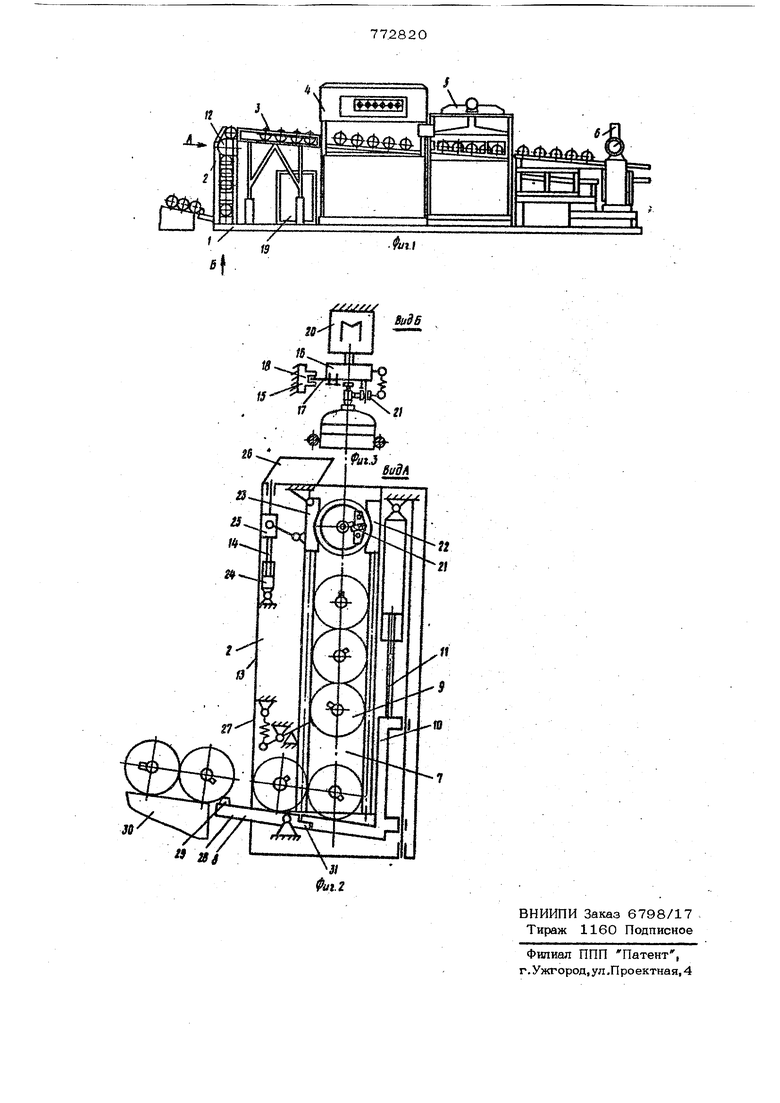
Изобретение относится к машиностроеато и найдет применение в производстве баппонов для сжиженного газа. Наиболее близким к предлагаемся техническим решением является попу втоматическая линия пневмоиспытаний и тарирования баллонов, содержащая установлен1Юе в технологической последоватепьности оборудование, соединенное между собой транспортно-накопительной системо в виде подъемника шахтного типа и гравитационного транспортера-накопителя р Недостатками известной линии являют ся использование большого количества до полнительных транспортных и передаточных устройств, что ведет к увеличению занимаемых производственных площадей и в целом к снижению производитальвооти. Цель изобретения - повышение проиэводительности за счет сокращения числа вспомогательных переходов. Поставленная цель достигается тем, что подъемник снабжен механизмом фикса шш баллонов, механизмом завинч1шания вентиля, выполненным в виде кин1гмат1 чески связанных между собой поводкозого патрона и реаерсивного гидропривода и устройством углоеой ориентации поводкового патрона, причем pa6o4idt элемент по водкового патрона выполнен скошенным и устеновлен с воз южностью осевого пара« ещения. Кроме того, устройство угловой ориентации поводкового патрона снабжено бесконтактным выключателем, а поводюоеый патрон имеет экранирующую пластину и электрически связан через счетчик га«(пульсов с реверсивным гидроприводом. На фиг. 1 показана предлагаемая полуавтоматическая линия, общий вид; на фнг. 2 - вид А на фиг. 1; на фиг. 3 вяд Б на фиг. 1. Полуавтоматическая линия пневмоиспытаний и тарир жания баллонов содержит установленные на общей раме 1 подъемник 2 шахтного типа, гравиташюнньтй тратспортер-накопитель 3, бронекамеру 4,
ванну 5 и ycraKOBity 6 тарирования. В шахте 7 подьемнкка 2 размещены устройство nnss поштучной выдачи 8 баллонов 9; взаимодействующие с кареткой 10 механизма It подъема, механизм 12 эавинчивания вентиля 13, механизм 14 фиксации балпонов 9 и устройство 15 угловой opi ентации поводкового патрона 16 с закрепленной на нем экранирующей -пластиной 17
В плоскости вравдения пластины 17 на раме механизма завинчивания 12 установлен бесконтактный выключатель 18, электрически связанный через счетчик mv пyль™ сов (не показан) с реверсив1шм регулируемым гидроприводом 19, содержащим высокомоментный гвдромотор 2О, кон1рольно регупиру ощую аппаратуру, в том числе реле давпения, а также реверсивный гидрораспределитель (не показаны}, который обеспечивает при нейтральном положении зоаотника запирание полостей Г5вдромото- ра 20.
Повошсовый патрон 16 механизма 12 завинчгюания содержит скошенный подпружиненный рабочий элемент 21, взакмодействующий при завинчивании с патрубком вентиля 13 и смонтированный с возможьхостыо осевого перемещения.
Механизм 14 фшссации выполнен в виде двук призм 22 и 23 и привода 24. Призма 22. неподвижно закреплена на стенке шахты 7, обращенной к гравитационному трансаортеру накопителю 3; призма 23 смонтирована с возможностью качания. причем она ктдаематически связана с само-35 ма
тормозяшшлся приводом 24 однорычаншым шарнирным механизмом - усилителем 25
Для, направления баллона из шахты подъемника на транспортер-накопитель 3 на станШ1е подъемника установлен упор 26.
В шахте 7 подъемника 2 шарнирно закреплен подпружиненный стопорный рычаг 27, предназначенный для удержания стопки баллонов 9 во время оп скагош каретки 10.
Рычаг 28 устройства для поштучной выдачи 8 баллонов 9 снабжен высчупом 29, предназначенным для отсекания баллонов, находящихся на склизе 30 камеры рентген-телевизионного контроля (не показана), или собственного магазина-питателя, а также для удержания баллона на рычаге 28 в момент поворота его на го™ ризонтальной оси, правое плечо рычага 28 оканчивается упором 31 для взаимодействия с кареткой 10.
Полуавтоматическая пиния работает следующим образом.
Баллон 9 из камеры рентген-телевизионного контроля (или магазина) подается на устройство 8 для поштучной выдачи баллонов.
Так как в исходном положении каретка 1О поднята, а рычаг 28 неуравновешен, баллон 9 перекатывается через выступ 29 попадая на рычаг 28. При опускании каретка 1О нажимает на упор 31 рычага 2.8, поворачивая последний вокруг оси, и благодаря этому баллон 9 скатывается на захваты каретки.
При этом баллон взаимодействует с конечным выключателем (не показан), подающим сигнал на подъем каретки 10
При подъеме каретки 1О баллон 9 от-; жимает стопорный рычаг 27, который после прохода баллона пружиной возврагщается в исходное положение, благодаря чему стопка баллонов после опускания каретки удерживается в поднятом попоже-, НИИ,;
После загрузки 4-х баллонов в шахту 7, в горловины 2-х - 3-к баллонов, накодяшихся ниже позиции завинчивания, оператором наживляются (ввинчиваются на 0,5 ... 0,8 нитки резьбы) вентили 13.
Баллон 9 с наживленным вентилем 13 при очередном цикле подъема подается в механизм 14 фиксации.
В крайнем верхнем положении упор каретки 1О взаимодействует с конечным выключателем (не показан), выдающим сигнал на включение привода 24 механиэповорачивается на оси и надежно фиксирует баллон 9 в соосном поводковому патрону 16 положении.
После фиксаций баллона подается сигнал на включение гидромотора 20 привода 19 поводкового патрона 16 (начало цикла завинчивания).
При вращении поводкового патрона 16 рабочий элемент 21 захватывает своей рабочей поверхностью патрубок вентиля .13, независимо от их взаимной начальной угловой ориентации. Крутящий момент на вентиль 13 передается Л1гшь при вращении поводкового патрона 16 по часовой стрелке. Ограничение величины максимально допустимого крутящего момента, развиваемого гидромотором 20, обеспечивается соответствующей настройкой реле давления, которое при достижении заданной величины давления в гвдросистемв выдает сигнал на переключение реверсивного гидрор спределителя привода 19.
Реверс вращения необходим для осуществления угловой ориентации 14 фиксации. При этом призма 23 рабочего элемента 21 относительно направпения подачи баллона в диахте, за счет возможности перемещения поводка в осевом направлении при взаимодействии его скошенной части с патрубком вентиля 13 Одновременно с командой на реверс вращения подается питание на счетчик нмпупьсов. После 1-го оборота поводкового патрона 16, счетчик импульсов замыканием своих контактов обеспечивает подачу питания на ранее обесточенный вы кпючатель 18. При входе экранирующей пластины 17 Б щель бесконтактного выключателя 18, последний выдает сигнал на переключение реверсивного гидрораспределнтеля в нейтральное положение, при котором обратно вращение патрона 16 прекращается, а полости гидромотора 20 запираются поясками золотника, осуществляя надежную фиксацию поводкового патрона 16 в сориенти рованном положении. При этом достигае-рся достаточная точность позиционирования за счет- малой инерционности гидравлического привода. Одновременно с переключением гидрораспределителя, бесконтактный выключатель 1-8 выдает сигнал на отвод призмы 23, которая, в свою очередь в крайнем левом положении взаимодействует сконечным выключателем, включающем привод механизма подъема 11. При выполнении следующего цикла подъема, очередной баллон 9 выталкивает с позиции завинчивания баллон с ввернутым вентилем на скат накопитель 3, После загрузки на скат накопитель 3 пяти баллонов с завинченными вентилзгми 13, стопор на скате открывается и баллоны перегружаются на стол бронекамеры 4, После их подключения к коллектору высокого давления посредством рукавов, стол поднимается в бронеколпак, и балавтоматически заполн5потсн сжатым лоны воздухом при давлении 25 кгс/см и выдерживаются в течение 2-х мин (испытание на прочность), после чего давление в них снижается до 16 кгс/см . Затем стон опускается в нижнее положэйие и после перекрытия вентилей 13, из коллек тсфа ВЫСОКОГО давления производится jq ©наж воздуха. После отсоединения рукавов.от баллонов, последние перегружаются в кпеть . ванны 5. Клеть опускается в ванну, и баллоны выдерживаются в погруженном состоянии в течение ЗО с (испытание на герметичность). Визуальный контроль наличия дефектов осуществляется при вкпк ченных подсветке и вращении бал лот. После выбраковки дефектных баллонов, клеть поднимается, и баллоны перегружаются на скат устансюки 6 тарирования, на которой производится измерение их объема и определение массы. Затем цикл повторяется. Формула изобретения1,Полуавтоматическая линия пн морюпытаний и тарирования баллонов, соде{ жащая установленное в технологической последовательности оборудование, соединенное между собой транснортно-накоп тельной системой, в виде подъемника шахтного типа и гравиташюнного транспорт&ра накопителя, отличающаяся тем, что, с целью повышения производительности за счет сокращения числа вспо могатепьных переходов, подъемник снабжен механизмом фиксации баллонсж, механизмом завинчивания вЪнтиля, выпо7гаевным в виде кинематически связанных между собой по&оакаваго патрона и реверсивного гидропривода и устройством угтжой ориентахгаи поводкового патрона, прячем .рабочий элемент гюводкового латрона вик полн@1 скошенным и установлен с возможностью осевого перемещения. 2.Линия по п. 1, отличаюшая с я тем, что устройство угловой ориевташга поводкового патрона снабжено бесконтактным выкточатепем, а павопковый патрон имеет экранирующую пластину и электрически связан через счетчик имцупь сов с реверсивным пщроприводом. Источники информации, принятые во внимание при экспертизе 1. Линия пневмоиспытаний и тарировання баллонов. ИнфО(Ж1ационный листок № , серия 10-14. УДК 621.05. НИИйннфо{ энергомаш. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1970 |
|
SU355848A1 |
| Станок для завинчивания резьбовых подвесок в баллоны | 1987 |
|
SU1484545A1 |
| Станок для завертывания и вывертывания вентилей | 1951 |
|
SU99245A1 |
| Поточная линия для заключительной отделки текстильных полотен | 1989 |
|
SU1647056A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Устройство для правки цилиндри-чЕСКиХ издЕлий | 1978 |
|
SU795618A1 |
| Устройство для загрузки полочных вагонеток | 1973 |
|
SU467002A1 |
| Устройство для пакетирования и обвязки предметов | 1982 |
|
SU1079548A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| СИСТЕМА МОНИТОРИНГА УСТАЛОСТИ МАТЕРИАЛА ПРИ ИЗГИБЕ ДЛЯ СТАЛЬНЫХ КАНАТОВ ПРИ ДЕЙСТВИИ НА НИХ КОРРОЗИИ И ПЕРЕМЕННОЙ НАГРУЗКИ | 2015 |
|
RU2649036C2 |