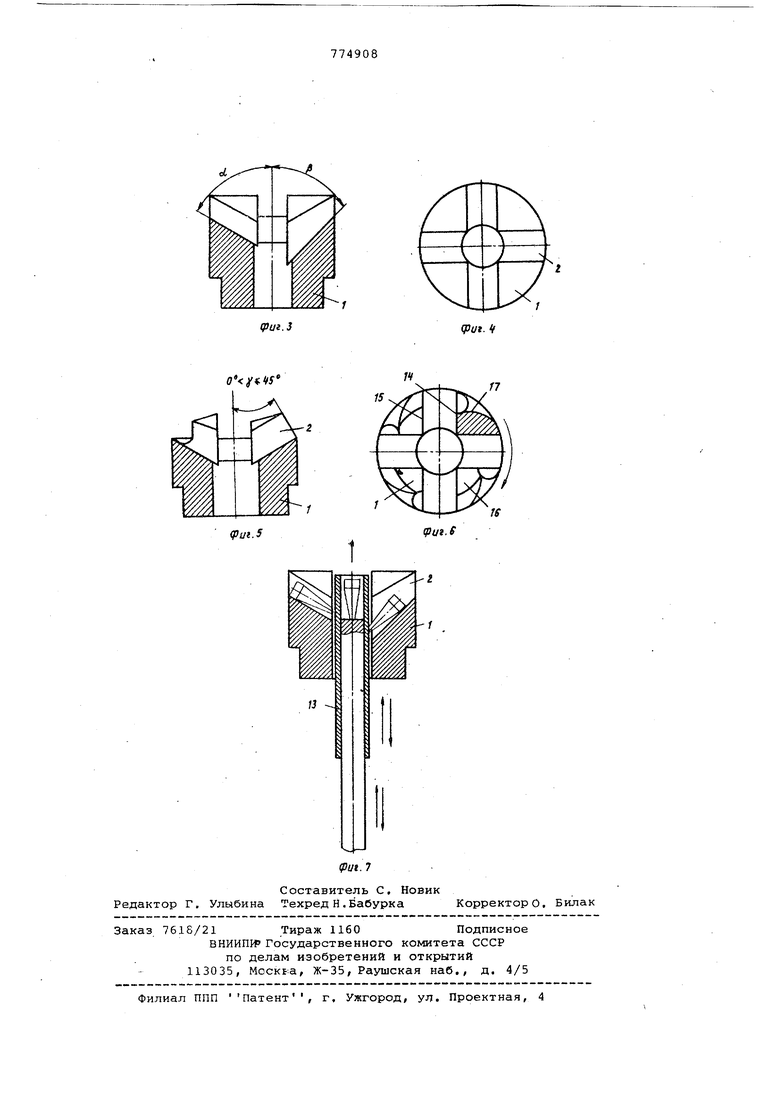
Под каждой воронкой 1 размещен трубчатый приемник-накопитель 13, установленный или стационарно в диске 9, или с возможностью возвратно-поступательных перемещений в зону расположения пазов 2 воронки 1
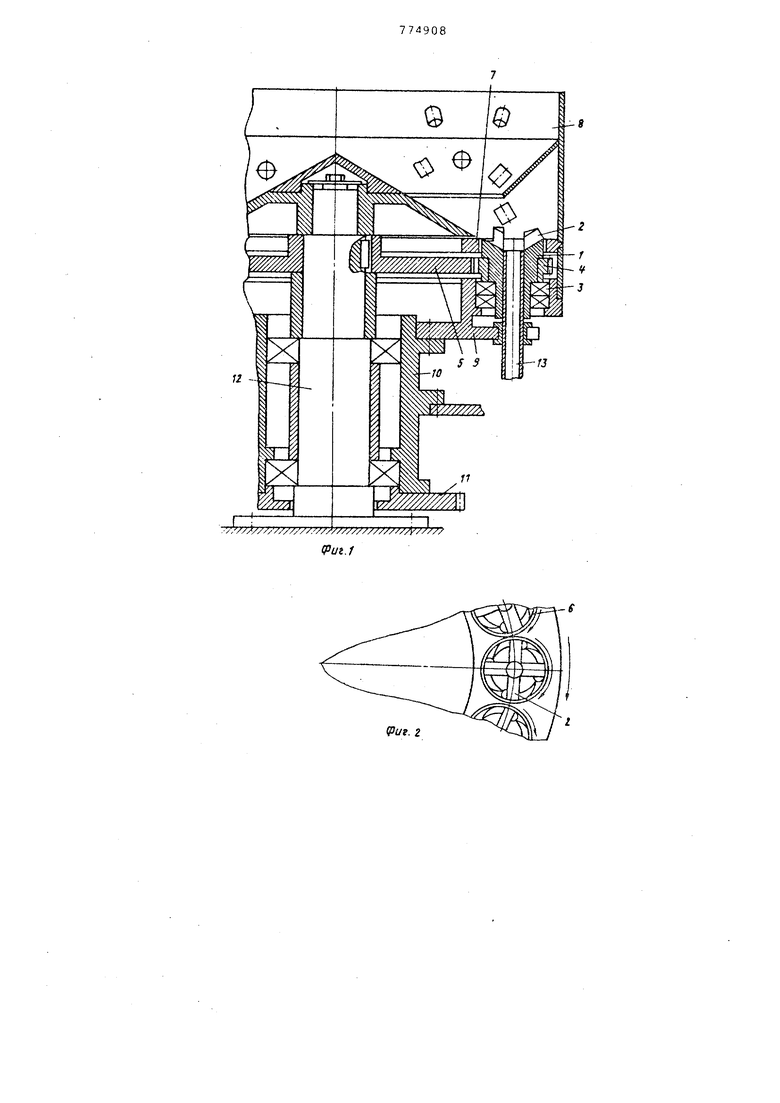
Паз 2 сформирован параллельными наклонными передней 14 и задней 15 стенками, выступающими над верхним торцом воронки 1, причем для создани принудительного напора, 16 каждой стенки паза и верхний край 17 передней Стенки 14 по направлению вращения воронки выполнены со скосами, направленными во внутрь воронки 1.
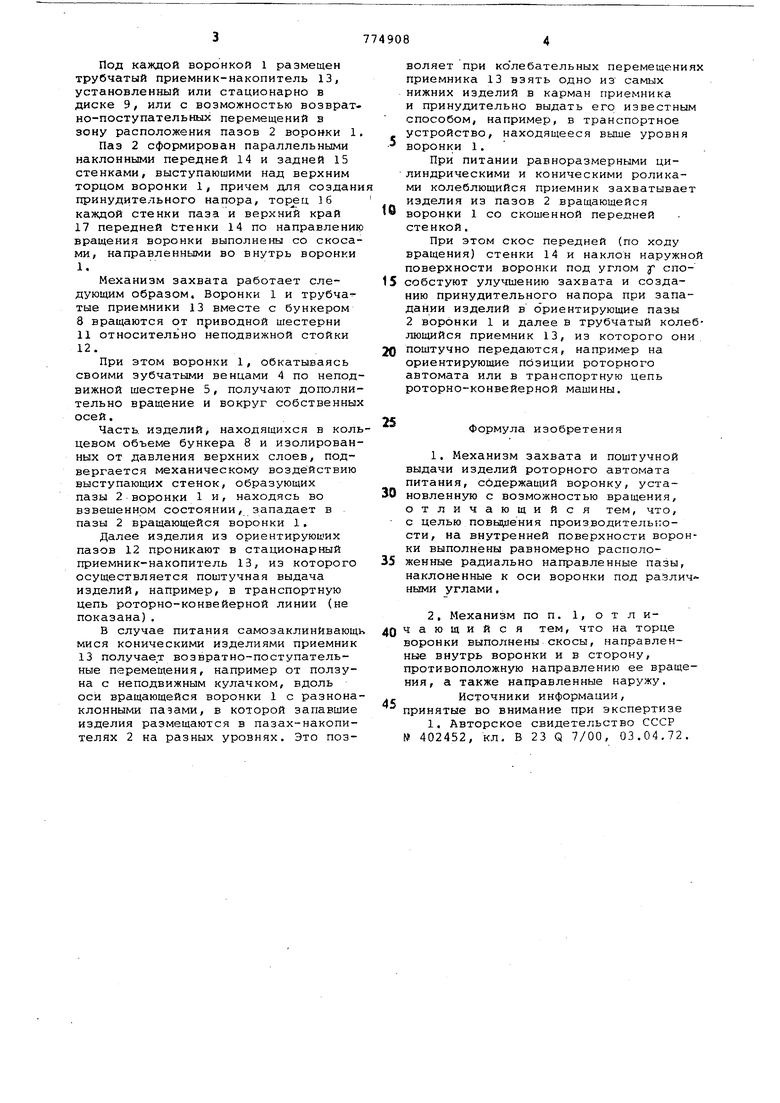
Механизм захвата работает следующим образом. Воронки 1 и трубчатые приемники 13 вместе с бункером 8 вращаются от приводной шестерни 11 относительно неподвижной стойки 12.
При этом воронки 1, обкатываясь своими зубчатьоми венцами 4 по неподвижной шестерне 5, получают дополнительно вращение и вокруг собственных осей.
Часть, изделий, находящихся в кольцевом объеме бункера 8 и изолированных от давления верхних слоев, подвергается механическому воздействию выступающих стенок, образующих пазы 2 воронки 1 и, находясь во взвешенном состоянии, западает в пазы 2 вращающейся воронки 1
Далее изделия из ориентируюших пазов 12 проникают в стационарный приемник-накопитель 13, из которого осуществляется поштучная выдача изделий, например, в транспортную цепь роторно-конвейерной линии (не показана).
В случае питания самозаклинйвающ мися коническими изделиями приемник 13 получает возвратно-поступательные перемещения, например от ползуна с неподвижным кулачком, вдоль оси вращающейся воронки 1 с разнонаклонными пазами, в которой запавшие изделия размещаются в пазах-накопителях 2 ка разных уровнях. Это позволяет при колебательных перемещениях приемника 13 взять одно из самых нижних изделий в карман приемника и принудительно выдать его известным способом, например, в транспортное устройство, находящееся выше уровня воронки 1.
При питании равноразмерными цилиндрическими и коническими роликами колеблющийся приемник захватывает изделия из пазов 2 вращающейся
« воронки 1 со скошенной передней стенкой.
При этом скос передней (по ходу вращения) стенки 14 и наклон наружной поверхности воронки под углом jr спо5 собстуют улучшению захвата и созданию принудительного напора при западании изделий в ориентирующие пазы 2 воронки 1 и далее в трубчатый колеблющийся приемник 13, из которого они
0 поштучно передаются, например на ориентирующие псэзиции роторного автомата или в транспортную цепь роторно-конвейерной машины,
Формула изобретения
1. Механизм захвата и поштучной выдачи изделий роторного автомата питания, содержащий воронку, установленную с возможностью вращения, отличающийся тем, что, с целью повы аения производительности, на внутренней поверхности воронки выполнены равномерно расположенные радиальио направленные пазы, наклоненные к оси воронки под различными углами.
2. Механизм по п. 1, о т л и0 чающийся тем, что на торце воронки выполнены скосы, направленные внутрь воронки и в сторону, противоположную направлению ее вращения, а также направленные наружу, Источники информации.
принятые во внимание при экспертизе
1. Авторское свидетельство СССР W 402452, кл, В 23 Q 7/00, 03.04,72,
/,. / //////////// / Л Т/
Риг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм захвата и поштучной выдачи изделий | 1981 |
|
SU996167A2 |
| Роторный автомат питания | 1981 |
|
SU994208A1 |
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Роторный автомат питания | 1979 |
|
SU870063A1 |
| Роторный автомат питания | 1978 |
|
SU779010A1 |
| Роторный автомат питания | 1983 |
|
SU1191255A2 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Роторный автомат питания | 1987 |
|
SU1491654A1 |
| Роторный автомат питания | 1977 |
|
SU666039A1 |
| Роторный автомат питания | 1985 |
|
SU1255375A1 |
ff
