1
Устройство относится к области механизации сборочных работ в машиностроении, приборостроении и др.
Известна автоматическая линия роторного типа для сборки узлов, 5 содержащая ротор с закрепленными на нем базовыми элементами под детали узла, например транспортные спутники, сборочные механизмы, неподвижные копиры и привод l)iО
Недостаток устройства - низкие технологические возможности.
Целью изобретения является расширение технологических возможностей,15
Цель достигается тем,что автоматическая линия снабжена неподвижными криволинейными направляющими, транспортный спутник снабжен рамкой и зубчато-реечным механизмом, колесо , 20 которого связано с рамкой, а рейка контактирует с копиром, причем часть сборочных механизмов расположена вне ротора, эти механизмы смонтированы в криволинейных направляющих, 25 связаны между собой гибкой связью и кинематически связаны с приводом. Кроме того линия снабжена неподвижным зубчатым сектором, а транспортный спутник снабжен дополнительным зуб- 30
чатым колесом, предназначенным для взаимодействия с этим сектором.
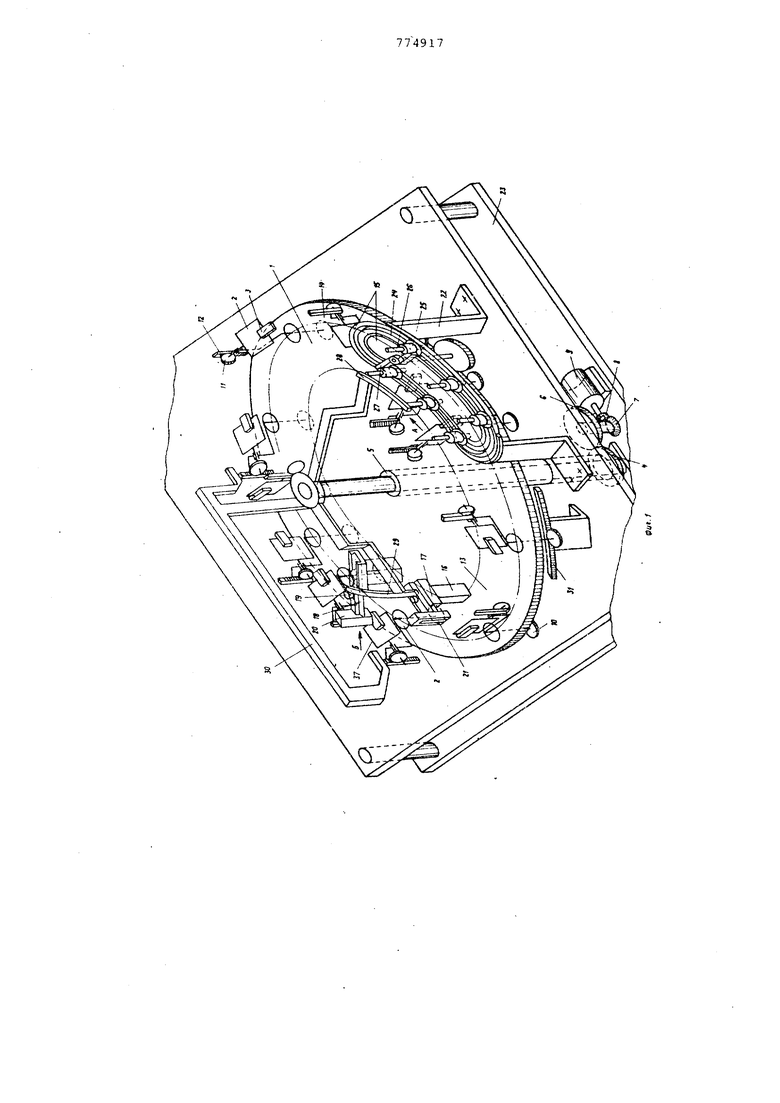
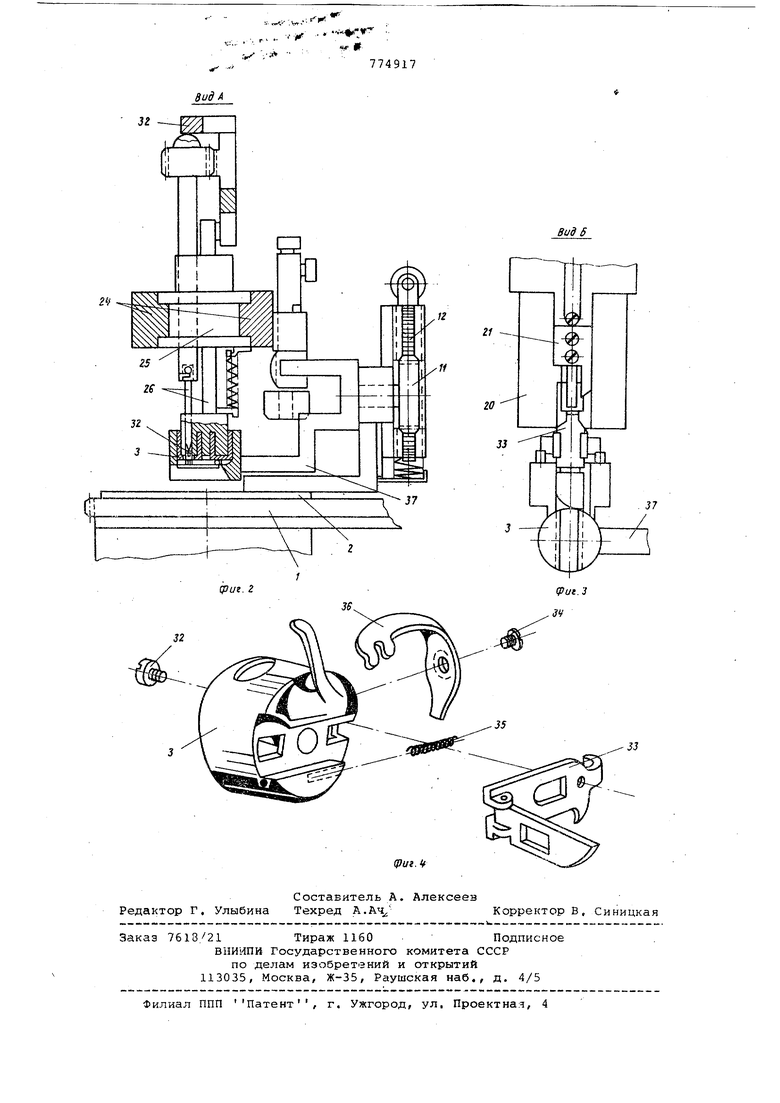
На фиг. 1 изображена автоматическая линия, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг.4 - конструкция собираемого изделия.
Автоматическая линия роторного типа для сборки узлов содержит транспортный стол 1 с расположенными на нем транспортныкм спутниками 2 под базовые детали 3 собираемого узла. Привод стола состоит из зубчатого колеса 4, насаженного на полый вал 5, и зубчатых-колес 6-8, получающих вращение от электродвигателя 9.
Каждый транспортный спутник 2 снабжен приводом, состоящим из дополнительного зубчатого колеса 10 и зубчато-реечной передачи, включающей колесо 11 и рейку 12,
Сборочные механизмы 13 установлены с внутренней стороны ротора, а сборочные механизмы 14 размещены вне ротора в направляющих 15. Причем механизмы 13 выполнены в виде опоры 16, закрепленной неподвижно на столе 1, с направляющей 17, которая песет ползун 18 с упором-19, и с
инструментальной головкой 20,несушей инструмент 21, Направляющие 15 размещены на неподвижных опорах 22 станины 23, Механизмы 14 выполнены в виде связанных гибкой связью 24 инструментальных головок 25 и инструментов 26 ,
Привод этих механизмов осуществляется от механизма 27, Управление инструментальными головками 25 осущестЕляется копиром 28, а инструментальными головками 20 - копиром 29,
Рейка 12 контактируется с копиром 30, а колесо 10 взаимодействует с эубчатьлЛ сектором 31,
Собираемый узел состоит из деталей 32, 33, 34, 35 и 36. Рамка 37 транспортного спутника связана с коЛ| сом 11,
Автоматическая линия роторного ти па для сборки узлов работает следующлм образом.
Транспортный стол 1 вращается непрерывно от электродвигателя 9 чэрез систему зубчатых колес 4, б, 7 и 8, Транспортный спутник 2 подходит к механизму 14 и движется под инструментальной головкой 25, приводимой в движение механизмом 2, Под действием копира 28 инструментальная головка 25 с инструментом 26, несущим деталь 32, опускается в гнездо детали 3, По окончании стыковки инструмент возвращается в исходное положение, а инструментальная головка 25 продолжает движение в направляющих 15,
Далее зубчатое колесо 10 транспортного спутника 2 входит в зацепление с зубчатЕлм сектором 31. Затем спутник 2 проходит под копиром 30, перемещающим рейку 12 вниз. Последняя через зубчатое колесо 11 разворачивает рамку 37 на определенный угол так, что деталь 3 занимает пустое положение.
необходимое для ее стыковки с де талью 33, Ползун 18 выдвигается в направляющую 17 посредством упора 19, обегающего копир 29. Инструментальная головка 20 с инструментом 21 перемещается на позицию стыковки с деталью 3, деталь 33 перемещается в гнездо базовой детали 3, Детали 34, 35, 36 собираются аналогично.
Формула изобретения
1,Автоматическая линия роторного типа для сборки узлов, содержащая ротор с закрепленными на нем базовыми элементами под детали узла, на-; пример, транспортные спутники, сборочные механизмы, неподвижные копиры и привод, отличающаяс, я тем, что, с целью расширения
технологических возможностей, она снабжена неподвижннлми криволинейными направляющими, транспортный спутник снабжен рамкой и зубчато-реечным механизмом, колесо которого связано
с рамкой, а рейка контактирует с копиром, причем часть сборочных механизмов расположена вне ротора, и эти механизмы смонтированы в криволинейных направляющих, связаны междусобой гибкой связью и кинематически связаны с приводом,
2,Линия поп, 1, отличающаяся тем, что она снабжена неподвижным зубчатым сектором, а транспортный спутник снабжен дополнительным зубчатым колесом, предназначенным для взаимодействия с этим.сектором.
Источники информации, принятые во внимание при экспертизе
1, Рабинович А.Н, и др. Сборочные машины и линии непрерывного действия, Киев, 1965, с. 24-30.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для копировальной обработки | 1984 |
|
SU1227424A1 |
| Устройство для групповой сборки и пайки монолитных керамических конденсаторов | 1988 |
|
SU1599912A1 |
| Устройство для обработки поверхностей переменной кривизны | 1980 |
|
SU933393A1 |
| Станок для шлифования лопаток | 1978 |
|
SU713086A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1997 |
|
RU2123915C1 |
| Автоматическая линия для механической обработки деталей | 1977 |
|
SU707774A1 |
| Зуборезный станок для нарезания конических колес | 1991 |
|
SU1815025A1 |