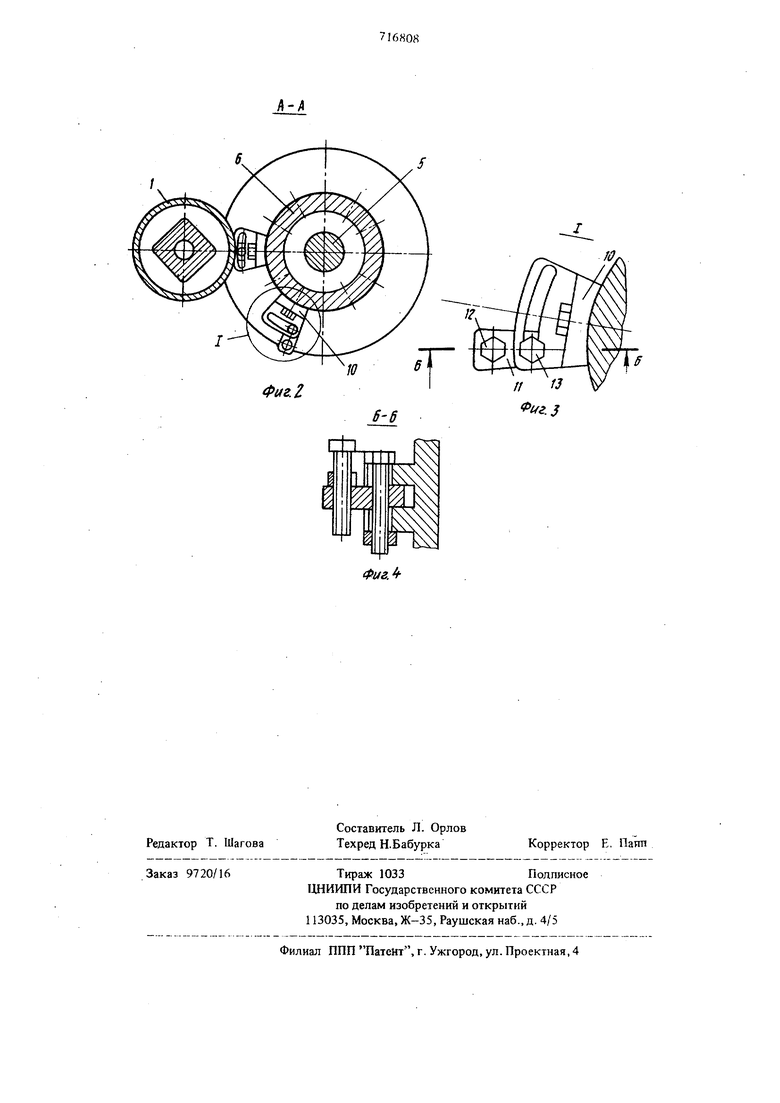
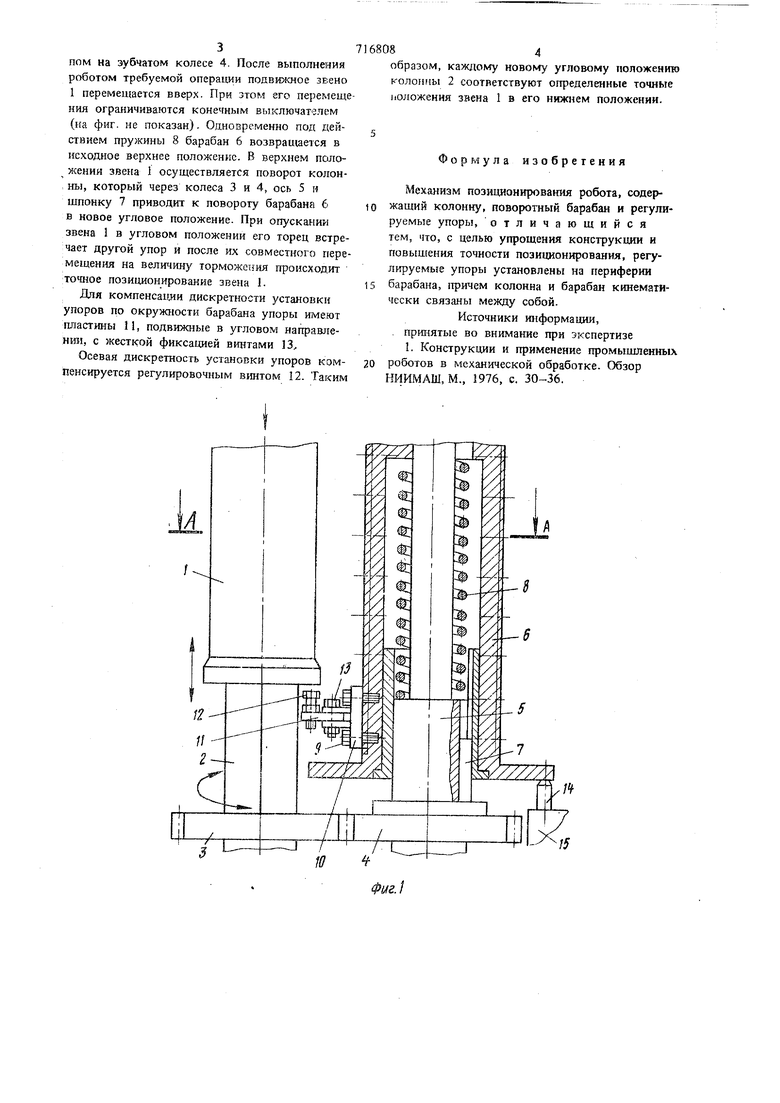
Изобретение относится к механизации и авто матизации производственных процессов, в частности к механизмам точного позиционирования подвижных звеньев роботов, манипуляторов и других устройств, и может быть использовано в различных отраслях народного хозяйства. Известен механизм позиционирования робота, содержащий колонну, поворотный барабан, регулируемые упоры и поворотный механизмП Однако сложность такого механизма, низкая жесткость при длинных упорах и наличие зазоров в промежуточных передачах от гидроцилиндра и блока с упорами до подвижного звена сйижают точность позиционирования. Для упрощения конструкции и повышения точности позиционирования регулируемые упоры установлены на периферии барабана, а по, воротный механизм выполнен в виде кинематической цепи между поворотной колонной . и барабаном. На фиг. 1 изображен предлагаемый механизм позиционирования, общий вид; на фиг. 2 дан разрез А-А на фиг. 1; на фиг. 3 дан узел I на фиг. 2; на фиг. 4 разрез Б-Б на фиг. 3. Подвижное звено 1 установлено на поворотной колонне 2, которая через зубчатые колеса 3 и 4 СБязанг с осью 5. На оси 5 установпен барабан 6, соединенный с осью шпоитгсГт 7 и пружиной 8 возврата. На периферии барабана 6 с помощью чтгатов 9 закрепляются упоры 10, имеющие подвижную пластину 11с регулировочным винтом 12. Жесткое закрепление пластины 11 осуществляется винтом 13. Фланец барабана 6 контактирует с плунжером 14 тормозного золотника 15. Работает механизм следующим образом. Перемещение звена 1 вниз (привод звена на фиг. не показан) осуществляется до тех пор, пока торец звена не встретит регулировочный винт 12 одного из упоров 10. После чего барабан 6, преодолевая усилие пружины 8, перемещается вниз. Фланец барабана 6, взаимодействуя с плунжером 14 тормозного золотника 15, осуществляет плавное торможенк звена 1. Ход барабана ограничен осевым расстоянием между фланцем барабана б и выступом на зубчатом колесе 4. После выполнения роботом требуемой операции подвижное звено 1 перемещается вверх. При зтом его перемеще ния ограничиваются конечным выключателем (на фиг. не показан). Одновременно под действием пружины 8 барабан 6 возвращается в исходное верхнее положение. В верхнем положения звена 1 осуществ.пяется поворот колонны, который через колеса 3 и 4, ось 5 и шпонку 7 приводит к повороту барабана 6 в новое угловое положение. При опускании звена 1 в угловом положении его торец встречает другой упор и после их совместного пере мещения на величину торможсьия происходит точное позиционирование эвена 1. Для компенсации дискретности установки упоров по окружности барабана упоры имеют пластины 11, подвижные в угловом направлении, с жесткой фиксацией винтами 13 Осевая дискретность установки упоров компенсируется регулировочным винтом 12. Таким
/5 84 образом, каждому новому угловому положению колонны 2 соответствуют определенные точные ||Оложения звена 1 в его нижнем положении. Формула изобретения Механизм позиционирования робота, содержаший колонну, поворотный барабан и регулируемые упоры, отличающийся тем, что, с целью упрощения конструкции и повышения точности позиционирования, регулируемые упоры установлены на периферии барабана, причем колонна и барабан кинематически связаны между собой. Источники информации, . во внимание при экспертизе I. Конструкции и применение промышленных роботов в механической обработке. Обзор НИИМАШ, М., 1976, с. 30-36.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм позиционирования робота | 1983 |
|
SU1123774A1 |
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Механизм поворота промышленного робота | 1983 |
|
SU1119839A1 |
| Привод робота | 1979 |
|
SU901675A1 |
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Промышленный робот | 1986 |
|
SU1360978A1 |
| Гидравлический манипулятор с механической системой программного управления | 1976 |
|
SU673595A1 |
| Гидрокопировальный суппорт | 1977 |
|
SU691277A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |