(54) УСТРОЙСТВО ДЛЯ.РЕГИСТРАЦИИ МАНЕВРОВ ГЛАВНОГО СУДОВОГО ДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации маневров главного судового двигателя | 1982 |
|
SU1057377A2 |
| Устройство для регистрации маневров главного судового двигателя | 1982 |
|
SU1115964A2 |
| Устройство для регистрации маневров главного судового двигателя | 1975 |
|
SU547070A1 |
| Автоматическое устройство для регистрации маневров главного судового двигателя | 1972 |
|
SU441198A1 |
| Устройство для контроля и регистрации маневров главного судового двигателя | 1986 |
|
SU1331732A2 |
| СУДОВАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ ТЕЛЕМЕТРИЧЕСКОГО КОНТРОЛЯ | 2011 |
|
RU2493045C2 |
| СИСТЕМА УПРАВЛЕНИЯ, КОНТРОЛЯ И РЕГИСТРАЦИИ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2293196C1 |
| Автоматизированная установка ультразвукового контроля | 2016 |
|
RU2629687C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, КОНТРОЛЯ И РЕГИСТРАЦИИ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2292576C1 |
| Система и способ эксплуатационного контроля неисправностей в подшипниках роторного оборудования | 2020 |
|
RU2752287C1 |
Изобретение относится к судостроению, в частности к устройствам для регистрации маневров главного судового двигателя.5
Известно устройство для регистрации маневров главного судового двигателя, содержащее датчик команд,датчик оборотов двигателя,датчик време- 10 ни,которые своими выходами соединены со входами аналого-цифрового преобразователя, иметадего четыре входа и .четыре выхода, при этом первый, второй и третий выходы аналого-диЛрово- 15 го преобразователя соответственно соединены с первым входом блока контроля отклонения оборотов, с входом блока выявления нулевых оборотов и Ьервым входом регистриру- 20 квдего устройства, причём выход блока контроля отклонения оборотов через блок анализа длительности отклонения оборотов связан с первым входом блока управления, а второй вход 25 блока управления - с выходом блока выявления нулевых оборотов, при этом первый -выход блока управления соединен со вторым входом блока контроля отклонения оборотов, а второй вы- 30
ход - со вторым входом регистрирующего устройства 1 .
Недостатком данного устройства является то, что оно не регистрирует РИД управления, т.е. ручное или управление с использованием системы дистанционного автоматизированного управления (ДДУ).
Цель изобретения - расширение функциональных возможностей устройства путем регистрации изменения вида управления двигателем.
Это достигается тем,что в предлагаемое устройство введены датчик вида управления двигателем и блок анализа вида управления двигателем, при этом выход датчика вида управления двигателем связан с четвертым входом аналого-цифрового преобразователя, выход которого соединен со входом блока анализа вида управления двигателем, а первый выход этого блока соединен со вторым входом блока анализа длительности отклонения оборотов, второй же его выход соединен с третьим входом блока управления.
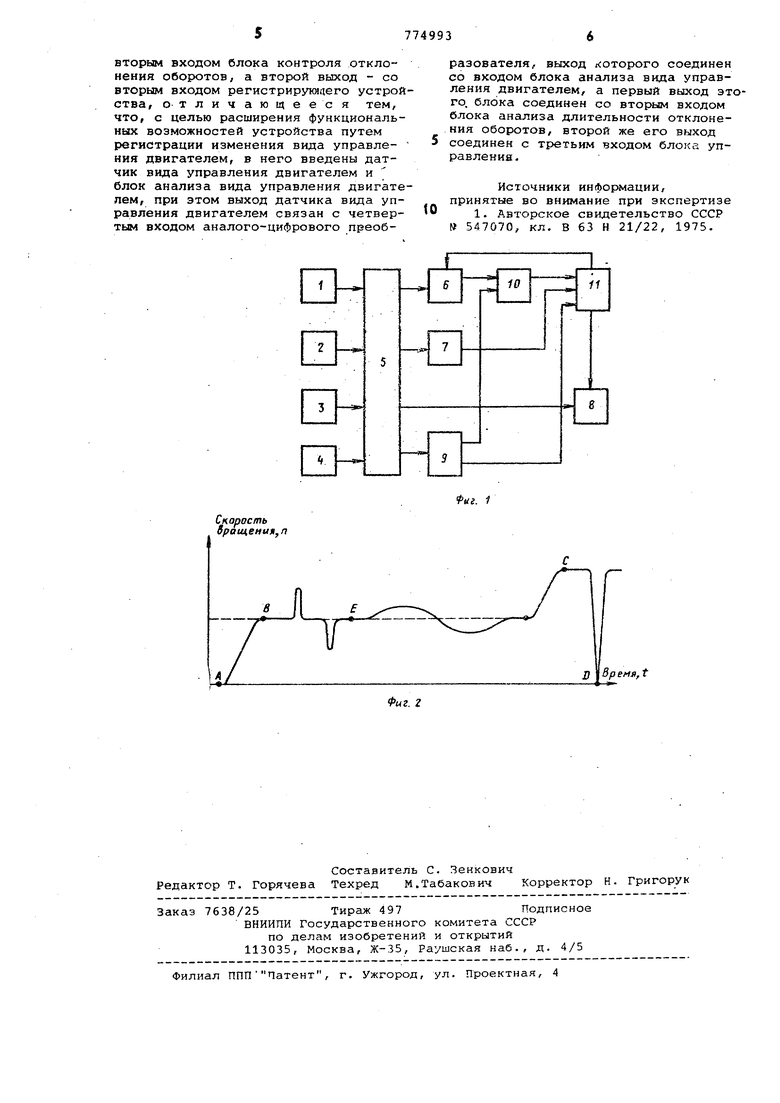
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. график режимов работы главного двигателя.
Устройство содержит датчик 1 команд, датчик 2 оборотов двигателя, датчик 3 времени, датчик 4 вида управления двигателем, которые своими выходами соединены со входами аналого-цифрового преобразователя 5, при этом первый, второй, третий и четвертый выходы преобразователя соединены с первым входом блока 6 контроля отклонения оборотов, с входом блока 7 выявления нулевых обсфотов, с первым входом регистрирующего устройства 8 и с входом блока 9 анализа вида управления двигателем соответственно, причем первый выход этого блока соединен со вторым входом блока 10 анализа длительности отклонения оборотов, а второй его выход с третьим входом блока 11 управления.
Блок 11 управления первым выходом связан со вторым входом блока 6 контроля отклонения оборотов, вторым выходом - со BTOpbiM входом устройства 8.
Блок б контроля отклонения оборотов своим выходом через первый вход блока 10 анализа длительности отклонения оборотов связан с первым входом блока 11 управления, а блок 7 выявления нулевых оборотов своим выходом связан со вторым входом блока 11 управления. Точки на графике обозначают: А - подача команды, и С - изменение скорости хода судна, Д - остановка двигателя, Е - изменение вида управления двигателя.
Устройство работает следующим образом.
При включении системы ДАУ и при изменении режима ее работы, т.е. при переходе на ручное управление, меняется выходной сигнал датчика 4 вида управления двигателем. Сигнгш с выхода этого датчика поступает на четвертый вход преобразователя 5.Сигнал с четвертого выхода преобразователя 5 поступает на вход блока 9 анализа вида управления. Блок 9 сравнивает введенный сигнал с ранее зарегистрированным и в случае их несовпадения т.е. при выявлении перехода на другой вид управления двигателем, вьадает в блок 11 управления сигнал на регистрацию (точка Е ) и устанавливает заданное время в блоке 10 анализа длительности отклонения оборотов При изменении оборотов двигателя, т.е. при отклонении их от последнег зарегистрированного значения, меняеся выходной сигнал датчика 2 оборотов двигателя и входной сигнал блока 6 контроля отклоненияоборотов.
В момент превышения абсолютной величины отклонения оборотов над ее значением, заданным-в блоке б блок 9 выдает сигнал на вход блока 10,
который начинает анализировать длительность отклонения оборотов, при этом ведя отсчет времени, в течение которого происходит это отклонение, и сравнивает его с задаиньм временем которое было в нем установлено. Когда отсчитываемое время становится равным заданному; блок 10 вьщает в блок 11 сигнал на регистрацию, прекращает отсчет времени отклонения и автоматически увеличивает заданное время для того, чтобы следуквдая регистрация от изменения оборотов была после более длительного отклонения оборотов.
Если за отсчитываемое время абсолютная величина отклонения оборотов уменьшится ниже ее значения, заданного в блоке 6, то отсчет времени отклонения оборотов прекращается,сигнал на регистрацию не вьщается и заданное время в блоке 10 не увеличиваетсяЕсли происходит резкая остановка двигателя, то блок 10 выдает сигнал на регистрацию только после истече-ния заданного времени, однако блок 7 выявления нулевых оборотов позволяет получить регистрацию в момент остановки.
В процессе работы регистрируются подача команды (точка А), изменение вида управления двигателем (точка Б), только те обороты, которые оказывают влияние на скорость хода судна (точкиВ иС), а также фиксируется, хоть кратковременная, остановка двигателя (точкаД .
Таким образом предлагаемое устройство увеличивает объем информации что позволяет более качественно оценить работу судовой двигательной установки .
Формула изобретения
Устройство для регистрации маневров главного судового двигателя, содержащее датчик команд, датчик оборотов двигателя, датчик времени, которые своими выходами соединены со входами аналого-цифрового преобразователя, имеющего четыре входа и четыре выхода, при этом первый, второй и третий выходы аналого-цифрового преобразователя соответственно соединены с первым входом блока контроля отклонений оборотов, с входом блока выявления нулевых оборотов и первым входом регистрирукяцего устройства, причем выход блока контроля отклонения оборотов через блок анализа длительности отклонения оборотов связан с первым входом блока управления, а второй вход блока уп равления - с выходом блока выявления нулевых оборотов, при этом первый выход блока управления соелииен со
вторым входом блока контроля отклонения оборотов, а второй выход - со вторым входом регистрирующего устройства, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем регистрации изменения вида управле- ния двигателем, в него введены датчик вида управления двигателем и блок анализа вида управления двигателем, при этом выход датчика вида управления двигателем связан с четвертым входом аналого-цифрового преобСпоростьвращения,п
разователя, выход которого соединен со входом блока анализа вида управления двигателем, а первый выход этого, блока соединен со вторым входом блока анализа длительности отклонения оборотов, второй же его выход 5 соединен с третьим входом блока управлении.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 547070, кл. В 63 Н 21/22, 1975.
D BpeHgft
