1
Изобретение относится к промышленному транспорту, в частности к конвейерам для транспортирования штучных грузов.
Известен конвейер для транспорти- 5 рования штучных грузов, содержащий двихсущуюся возвратно-поступательно штангу.с закрепленным на ней толкающим подпружиненньпи кулачком, взаимодействующим с транспортируемым грузом 1 .
Однако такой конвейер способен перемещать груз только в прямом на- правлении , поскольку обратное движе- 15 ние толкателя является холостым. Кроме того, при фиксированном верти.кальном положении толкателя каретка, направляющие и сам толкатель подвергаются при перемещении груза изгибаю-20 щим нагрузкам, поскольку усилия на фиксированный в вертикальном положении толкатель передаются консольно. При использовании ;сонвейера для перемещения вагонов и их тележек фиксация З в вертикальном рабочем положении толкателя не no3BOJHeT производить маневровую работу на стойках без снабжения каретки специальным приводом
толкателя, осущесхвляющим подъем тол-30
каталя при транспортировке груза и опускание его при маневрах.
Известен таклсе конвейер содержащий каретку, установленную на направляющих и связанную с тяговым органом, шарнирно закрепленный на каретке толкатель, имеющий возвратную пружину для перемещения его в исходное положение, реверсивный привод тягового oprat-a и грузонесущую тележку 2.
Такой конвейер имеет те же недостатки, что описанный ранее.
Целью изобретения является расширение функциональных возможностей и исключение изгибающих нагрузок, действующих на толкатель.
Эта цель достигается тем, что толкатель расположен на каретке с возможностью поворота относительно шар-, мира в обе стороны, а на грузонесущей тележке выполнены выступы для толкателя, причем высота расположения оснований Ёыступов от оси шарнира толкателя находится в зависимости
Н S i пЫ- L
где с - угол наклона толкателя в рабочем положении, не равный L - длина толкателя.
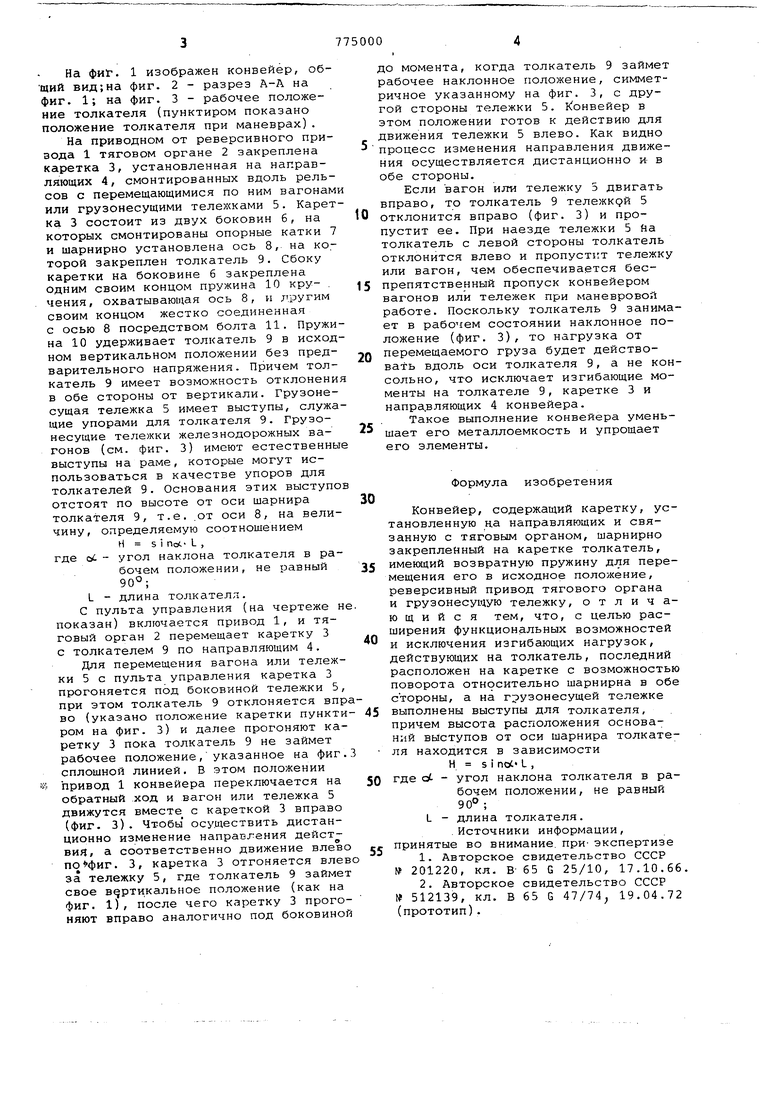
На . 1 изображен конвейер, обий вид;на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - рабочее положение толкателя (пунктиром показано положение толкателя при маневрах).
На приводном от реверсивного привода 1 тяговом органе 2 закреплена каретка 3, установленная на направляющих 4, смонтированных вдоль рельсов с перемещающимися по ним вагонами или грузонесущими телехсками 5. Каретка 3 состоит из двух боковин 6, на которых смонтированы опорные катки 7 и щарнирно установлена ось 8, на которой закреплен толкатель 9. Сбоку каретки на боковине 6 закреплена одним своим концом пружина 10 кру- . чения, охватывающая ось 8, и л.ругим своим концом жестко соединенная с осью 8 посредством болта 11. Пружина 10 удерживает толкатель 9 в исходном вертикальном положении без предварительного напряжения. Причем толкатель 9 имеет возможность отклонения в обе стороны от вертикали. Грузонесущая тележка 5 имеет выступы, служащие упорами для толкателя 9. Грузонесущие тележки железнодорожных вагонов (см. фиг. 3) имеют естественные выступы на раме, которые могут использоваться в качестве упоров для толкателей 9. Основания этих выступов отстоят по высоте от оси шарнира толкателя 9, т.е. .от оси 8, на величину, определяемую соотношением
И 5 i псэс- L ,
где су - угол наклона толкателя в рабочем положении, не равный 90°;
L - длина толкателя. С пульта управления (на чертеже не. показан) включается привод 1, и тяговый орган 2 перемещает каретку 3 с толкателем 9 по направляющим 4.
Для перемещения вагона или тележки 5 с пульта управления каретка 3 прогоняется под боковиной тележки 5, при этом толкатель 9 отклоняется вправо (указано положение каретки пунктиром на фиг. 3) и далее прогоняют каретку 3 пока толкатель 9 не займет рабочее положение, указанное на фиг.3 сплошной линией. В этом положении привод 1 конвейера переключается на обратный ход и вагон или тележка 5 движутся вместе с кареткой 3 вправо (фиг. 3) . Чтобы осуществить дистанционно изменение направления действия, а соответственно движение влево . 3, каретка 3 отгоняется влево за тележку 5, где толкатель 9 займет свое вертикальное положение (как на фиг. 1), после чего каретку 3 прогоняют вправо аналогично под боковиной
до момента, когда толкатель 9 займет рабочее наклонное положение, симметричное указанному на фиг. 3, с другой стороны тележки 5. К онвейер в этом положении готов к действию для движения тележки 5 влево. Как видно процесс изменения направления движения осуществляется дистанционно и в обе стороны.
Если вагон или тележку 5 двигать вправо, то толкатель 9 тележкрй 5 отклонится вправо (фиг. 3) и пропустит ее. При наезде тележки 5 йа толкатель с левой стороны толкатель отклонится влево и пропустит тележку или вагон, чем обеспечивается беспрепятственный пропуск конвейером вагонов или тележек при маневровой работе. Поскольку толкатель 9 занимает в рабочем состоянии наклонное положение (фиг. 3), то нагрузка от перемещаемого груза будет действовать вдоль оси толкателя 9, а не консольно, что исключает изгибающие моменты на толкателе 9, каретке 3 и напра.вляющих 4 конвейера.
Такое выполнение конвейера уменьшает его металлоемкость и упрощает его элементы.
Формула изобретения
Конвейер, содержащий каретку, установленную на направляющих и связанную с тяговым органом, шарнирно закрепленный на каретке толкатель, имеющий возвратную пружину для перемещения его в исходное положение, реверсивный привод тягового органа и грузонесущую тележку, отличающийся тем, что, с целью расширений функциональных возможностей и исключения изгибающих нагрузок, действующих на толкатель, последний расположен на каретке с возможностью поворота относительно шарнирна в обе стороны, а на г узонесущей тележке выполнены выступы для толкателя, причем высота расположения оснований выступов от оси шарнира толкателя находится в зависимости
Н 5 i not- L ,
0 где at - угол наклона толкателя в рабочем положении, не равный 90°; L - длина толкателя.
.Источники информации, принятые во внимание, при- экспертизе
1.Авторское свидетельство СССР
№ 201220, кл. В- 65 G 25/10, 17.10.66.
2.Авторское свидетельство СССР
№ 512139, кл. В 65 G 47/74, 19.04.72 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Устройство для загрузки крытых железнодорожных вагонов затаренными в мешки грузами | 1976 |
|
SU685598A2 |
| Механизированный склад | 1981 |
|
SU958273A1 |
| Устройство для размораживания пищевых продуктов | 1973 |
|
SU475991A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| УСТРОЙСТВО для МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ГРУ301В | 1972 |
|
SU334785A1 |
| Устройство для управления стопорными кулаками маневровой тележки для передвижения железнодорожных вагонов | 1974 |
|
SU527327A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |

