вого настила с возможностью взаимодействия с люлькой, сошедшей с элеватора.
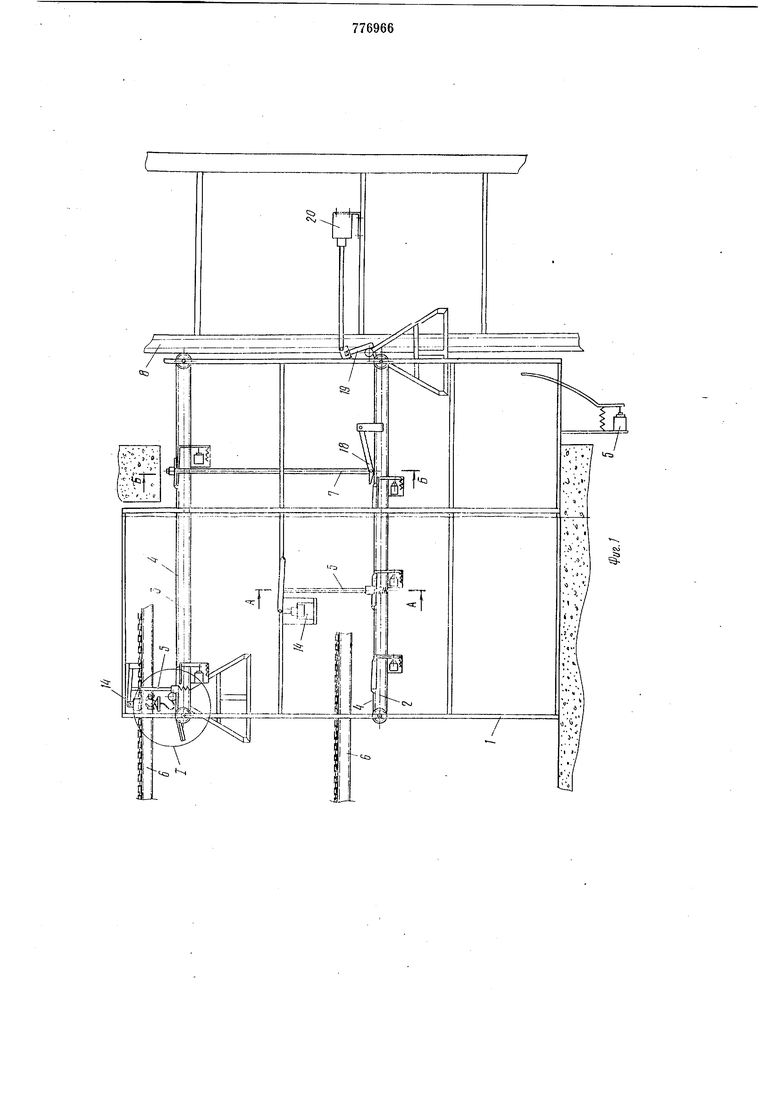
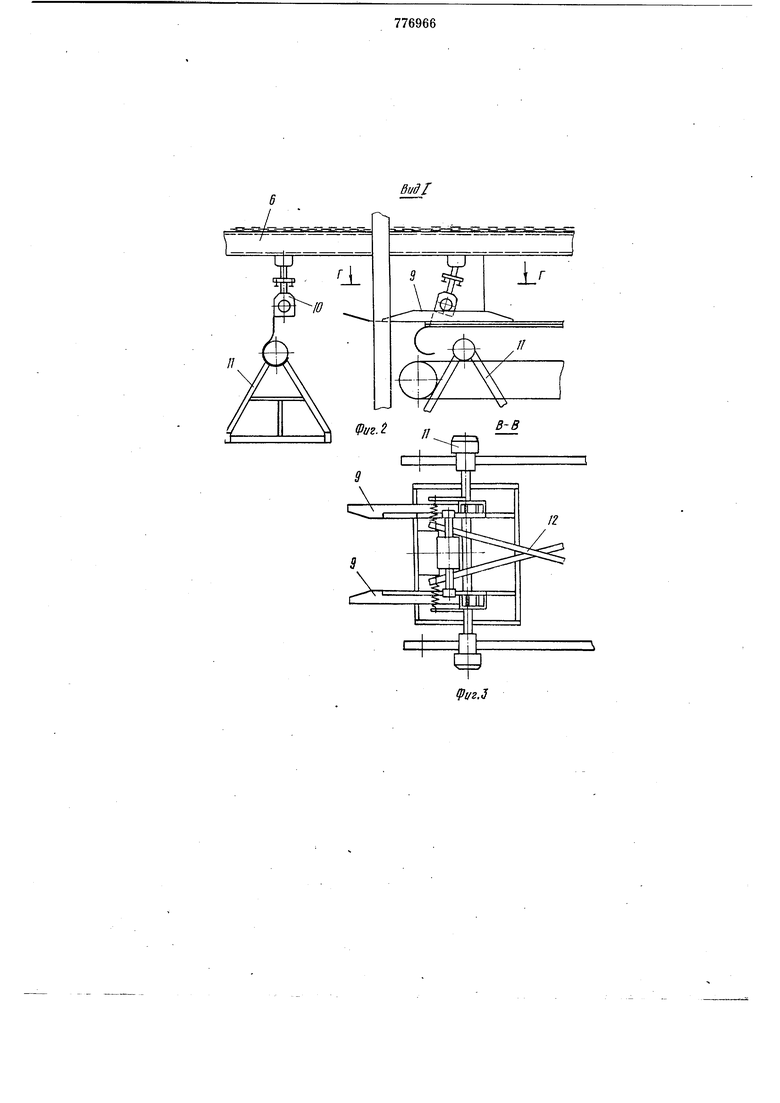
На фиг. 1 изображен перегружатель люлек, обш,ий вид; на фиг. 2 - узел I фиг. 1; на фиг. 3 -разрез В-В фиг. 2; на фиг. 4- разрез А-А фиг. 1; на фиг. 5 -разрез Б-Б фиг. 1; на фиг. 6 - расположение датчиков на перегружателе и в элеваторе.
Перегружатель содержит раму 1, на которой смонтированы нижние 2 и верхние 3 направляюш,ие с грузовыми настилами 4. К нижней направляющей 2 крепится останов 5, расположенный у подвесного конвейера 6, и останов 7, расположенный на направляюших 2 и 3 нижнего и верхнего яруса в зоне действия элеватора 8. На раме 1 перегружателя над нижними 2 и верхними 3 направляюш,ими расположены криволинейные в вертикальной плоскости лыжи 9 для наклона грузоносителя 10 подвесного конвейера 6 и момент схода с него на перегружатель люльки 11. Фиксаторы грузоносителя 10 состоят из подпружиненных рычагов 12.
Останов 5 для люльки содержит закреп.ленную на нижней направляющей 2 вертикальную подпружиненную штангу 13, управляемую электромагнитом 14. На штанге жестко закреплен флажок 15, взаимодействующий с люлькой И. Останов 5 установлен на верхней направляюшей 3. Останов 7 для люльки содержит вертикальную подпрул иненную штангу 16 с флажком 17. Штанга 16 связана с управляющим одноплечным рычагом 18, шарнирно закрепленным на нижних направляющих 2. Свободный конец управляющего рычага 18 взаимодействует с люлькой, поступающей из элеватора 8 на нижние направляющие 2. Подача люльки с элеватора на перегружатель производится сталкивателем 19, управляемым электромагнитом 20.
На нижней и верхней направляющих закреплены датчики системы автоматического управления: датчик 21 грузоносителя подвесного конвейера, датчик 22 люльки на верхней направляющей у. подвесного конвейера, датчик 23 люльки на верхней направляющей у элеватора, датчик 24 люльки на нижней направляющей у элеватора, датчик 25 в элеваторе.
Перегружатель люлек работает следующим образом.
Поднимаемый элеватором 8 груз в виде люльки 11 с кипой сталкивателем 19, управляемым электромагнитом 20, сбрасывается на нижние направляющие 2 перегружателя.
По грузовому настилу 4 люлька 11 двигается до останова 7, где взаимодействует с управляющим одноплечным рычагом 18, который через подпружиненную штангу 16 убирает с пути люльки, стоящей на верхней направляющей 3 у останова 7, флажок 17. Грузовой настил верхних направляющих 3
перемещает люльку в элеватор на освободившееся в нем место.
Люлька, поступившая на нижние направляющие, грузовым настилом перемещается до останова 5, который своим флажком 15 задерживает ее до подхода грузоносителя 10 подвесного конвейера 6 к месту остановки люльки. После подхода грузоносителя 10 электромагнит 14 через подпружиненную штангу 16 убирает флажок 15 и люлька грузовым настилом подается в грузоноситель 10 подвесного конвейера, который перемещает ее в место съема кип. Освободившаяся люлька тем же подвесным конвейером подает ся к верхним направляющим 3, где грузо носитель 10 своими роликами взаимодействует с криволинейной лыжей 9, закрепленной на раме 1 перегружателя. Подпружиненный рычаг 12 придерживает грузоноситель 10 от раскачивания. При этом грузовой настил 4 верхних направляющих 3 перемещает люльку до останова 5 на верхних направляющих. После освобождения места
на верхних направляющих у останова 7 флажок убирается, пропуская люльку.
Система автоматического управления перегружателем работает следующим образом.
Когда первая люлька подается в зону действия датчика 22 люльки на верхней направляющей у подъемного конвейера, а грузоноситель подвесного конвейера освобождает зону действия датчика 21 грузоносителя подвесного конвейера, включается электромагнит 14 останова на верхней направляющей перегружающего устройства, которое пропускает люльку по направлению к элеватору.
Когда люлька уходит с датчика 22, включается электромагнит 14 останова на верхней направляющей перегружающего устройства. Пока люлька транспортируется от датчика 22 по направлению к датчику 23, датчик 22 может включаться от следующей люльки, но до освобождения датчика 23, электромагнит 14 останова на верхней направляющей перегружающего устройства не включится.
При подходе люльки в элеваторе к месту обмена срабатывает датчик 25 и включает электромагнит 20 съемника люлек с элеватора, что приводит к сталкиванию люльки
с элеватора на нижнюю направляющую перегружающего устройства к датчику 24. Последний выключает электромагнит 20.
Поступившая из элеватора люлька перед включением датчика 24 открывает механический останов на верхней направляющей перегружающего устройства, который пропускает на элеватор люльку, находящуюся в зоне действия датчика 23. При включении этого датчика снова
включается электромагнит 14 останова на
верхней направляющей перегружающего устройства, затем цикл повторяется.
Такое выполнение перегружателя позволяет механизировать процесс передачи люлек с подвесного конвейера на одну сторону элеватора и обратно.
Формула изобретения
1. Перегружатель люлек с элеватора на подвесной конвейер и обратно, содержащий раму, сталкиватель люлек с элеватора, механизмы съема и навешивания люлек на подвесной конвейер, грузовые настильт с направляющими для перемещения люлек и систему автоматического управления механизмами с датчиками, отличающийся тем, что, с целью повышения производительности путем перемещения люлек в двух направлениях с одной стороны элеватора, грузовые настилы установлены друг над другом и снабжены остановами люлек, размещенными на направляющих верхнего и нижнего грузовых настилов у элеватора и подвесного конвейера, при этом механизмы съема и навещивания люлек на подвесной конвейер выполнены в виде размещенных над направляющими грузовых настилов криволинейных лыж и подпружиненных фиксаторов для взаимодействия с грузоносителем подвесного конвейера,
2.Перегружатель по п. 1, отличающийся тем, что остановы люлек, размещенные у подвесного конвейера, закреплены на направляющих каждого грузового
настила и каждый из остановов выполнен в виде приводной от электромагнита вертикальной подпружиненной штанги с флажком для взаимодействия с люлькой.
3.Перегружатель по п. 1, отличающийся тем, что останов люлек, размещенный у элеватора, закреплен на направляющей верхнего грузового настила и выполнен в виде подирул иненной щтанги с флажком для взаимодействия с люлькой, загруженной в элеватор, и с управляющим одноплечным рычагом, установленным над направляющей нижнего грузового настила с возможностью взаимодействия с люлькой, сошедшей с элеватора.
Источники информации, иринятые во внимание при экспертизе
1.Авторское свидетельство СССР № 460227, кл. В 65G 47/02, 1973.
2.Левин Е. Т. и Лифшиц Н. И. Средства междуэтажного транспорта для штучных грузов, применяемых в СССР. «Организация складского хозяйства, механизация и
автоматизация, складских работ. № 1, 1970, с. 16-17 (прототип),
Budl
А-А
-/J
i
-/S


| название | год | авторы | номер документа |
|---|---|---|---|
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |
| Поточная линия для заключительной отделки текстильных полотен | 1989 |
|
SU1647056A1 |
| Устройство для перегрузки изделий | 1978 |
|
SU747787A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Устройство крепления грузовых емкостей на подвесках подвесного конвейера | 1975 |
|
SU740620A1 |
| Устройство для передачи на подвесной путь грузов, закрепленных на троллеях | 1991 |
|
SU1799830A1 |
| ХНННЕС-КА БИБЛИОТЕКА | 1971 |
|
SU304938A1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
| Устройство для укладки тестовых заготовок в карманы люлек конвейера расстойного шкафа | 1989 |
|
SU1655427A1 |
| ПОДВЕСКА ПОДВЕСНОГО ТОЛКАЮЩЕГО КОНВЕЙЕРА ДЛЯ КУЗОВА АВТОМОБИЛЯ | 2003 |
|
RU2253603C1 |