1
Изобретение относится к манипуляторостроению и касается средств для дистанционного наблюдения за работой кистебого узла манипулятора.
Известен манипулятор, содержащий привод, механическую руку с кистевым узлом, имеющим основание t расположенным на нем видеоконтрольным устройством, и устройство для дистанционного наблюдения за работой кистевого узла 1.
Недостатком известного манипулятора является то, что ориентация изображения относительно горизонтальной оси изменяется при изменении положения механической руки в пространстве, что усложня.ет условия работы оператора.
Цель изобретения - улучшение условий работы оператора.
Указанная цель достигается за счет обеспечения постоянной ориентации наблюдаемого оператором изображения объекта манипулирования относительно горизонтальной оси, для этого манипулятор снабжен расположенным на основании грузом, основание выполнено в виде свободно закрепленной на кистевом узле манипулятора опоры, видеоконтрольное устройство и груз расположены в плоскости, перпендикулярной оси кистевого узла, но диаметрально проти воположно друг другу.
Причем масса груза превыщает массу видеоконтрольного устройства, а само видеоконтрольное устройство выполнено в виде набора стекловолоконных световодов.
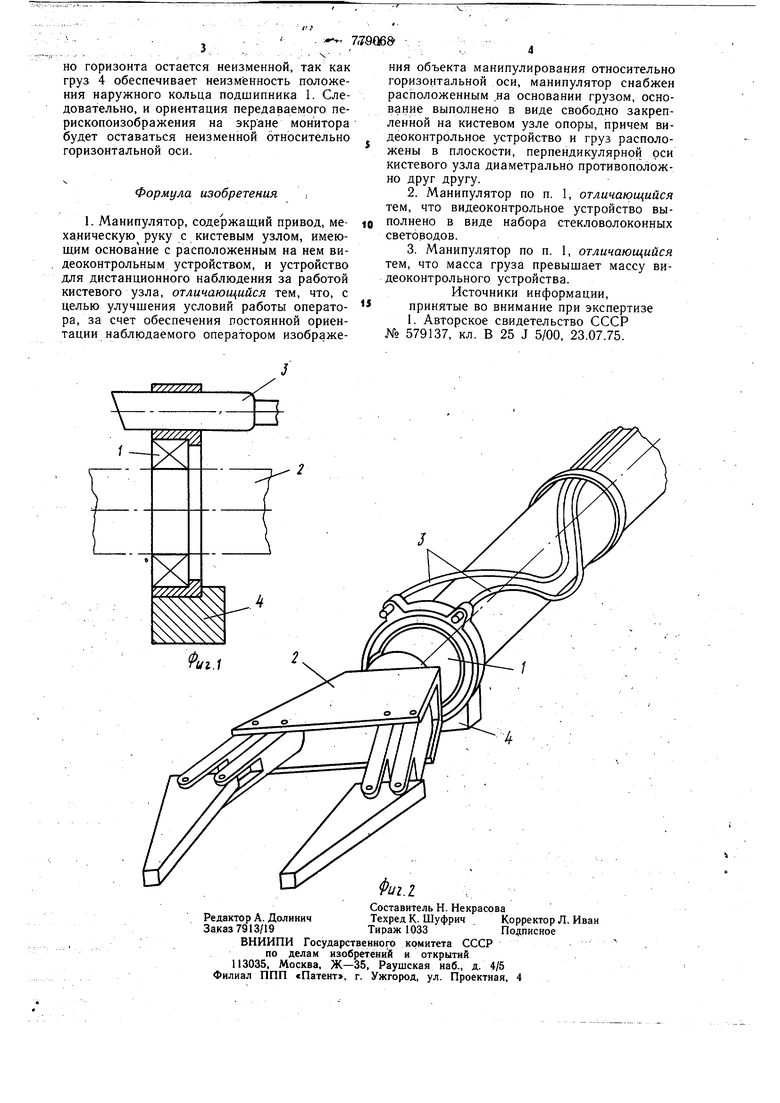
На фиг. 1 представлено устройство для дистанционного наблюдения; на фиг. 2 - крепление этого устройства на кистевом узле манипулятора.
10 Устройство для дистанционного наблюдения имеет основание в вдде подшипника 1, внутреннее кольцо подщипника I жёстко закреплено на кистевом узле 2 манипулятора. На наружном кольце подшипника 1 в плоскости, перпендикулярной его продольной оси,
установлено видеоконтрольное устройство 3. Диаметрально противоположно видеоконтрольному устройству 3 закреплен груз 4. Масса груза превышает массу видеоконтрольного устройства.
20 Устройство для дистанционного наблюдения работает следующим образом.
При,изменении положения-Кистевого узла манипулятора в пространстве ориентация видеоконтрольного устройства 3 относитель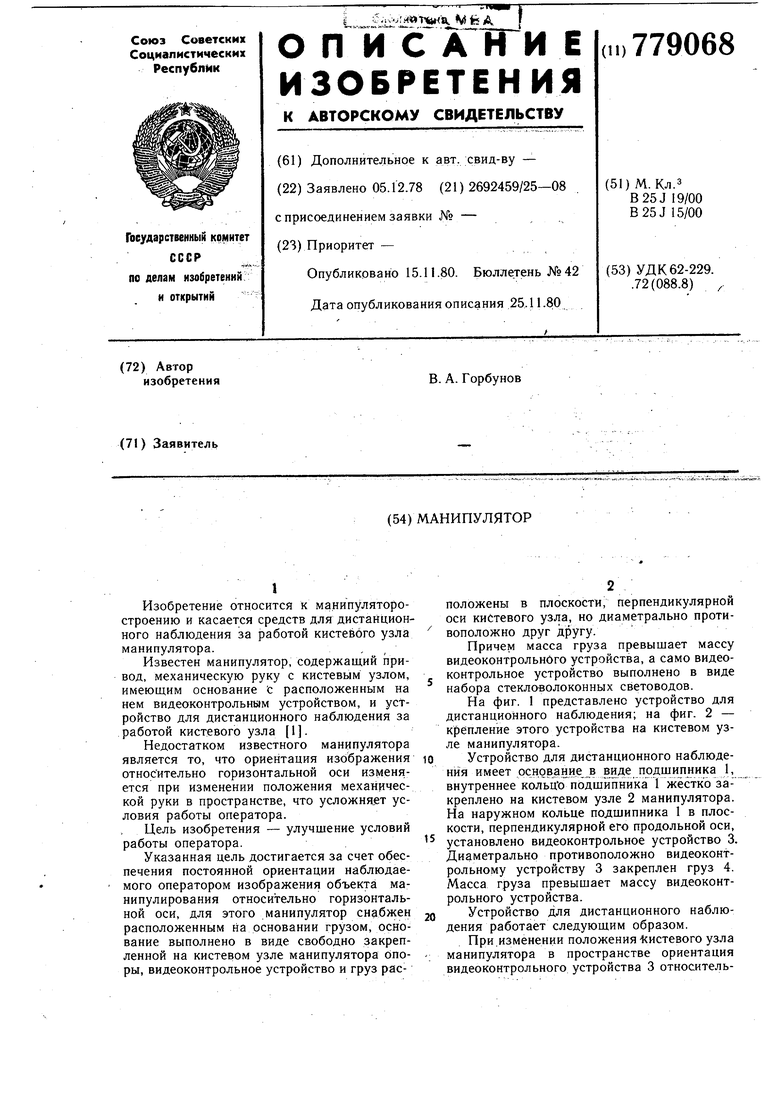
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU876423A2 |
| Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом | 2019 |
|
RU2743952C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Кистевой узел манипулятора | 1979 |
|
SU835734A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ ОПЕРАЦИОННЫМ ЭКЗОСКОПОМ | 2020 |
|
RU2757991C2 |
| УСТРОЙСТВО ДЛЯ УПРАЖНЕНИЙ НА КЛАВИАТУРЕ | 2008 |
|
RU2520927C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
