(Б ) СПОСОБ ТОРМОЖЕНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ управления процессом тормо-жЕНия КОлЕСА ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU852679A1 |
| Способ торможения колеса | 1984 |
|
SU1169860A1 |
| Способ управления процессом торможения автомобиля | 1980 |
|
SU912570A1 |
| Способ регулирования качения колеса в тормозном режиме | 1980 |
|
SU878627A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Способ управления торможением колеса | 1984 |
|
SU1172782A1 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
| Способ автоматического управления торможением | 1981 |
|
SU1013323A1 |
I
Изобретение относится к тормозным системам транспортных средств, а точнее к способам и.устройствам, обеспечивающим безблокировомное торможение, и используется в автоматических противоблокировочных системах.
Наиболе близким из известных технических решений является способ торможения колеса транспортного средства, в котором периодическое затормаживание и растормаживание осуществляют путем подачи на электромагнитный клапан сигнала переменной скважности, а величину скважности регулируют в зависимости от величины сигнала обратной связи, который вырабатывают пропорционально разности эталонного и текущего значений контролируемого параметра с учетом знака разности 1.
Такой способ позволяетустранить периодическое блокирование колеса в каждом цикле, но не может предотвратить постепенного возрастания величины относительного продольного скольжения колеса, которое в итоге приводит к блокированию. Это обусловлено тем, что сигнал обратной связи содержит только информацию о величине давления в тормозном приводе и не учитывает динамического состояния колеса.
Цель изобретения - повышение качества регулирования процесса торможения.
Цель достигается тем, что при отрицательной разности скважность пульсаций понижают, а при положительной - повышают.Величину текущего значения контролируемого параметра перед сравнением с эталонным значением осредняют не менее, чем за один цикл путем фильтрации сигнала. Темп изменения скважности задают пропорционально абсолютной величине разности эта;лонного и текущего значений контролируемого параметра.
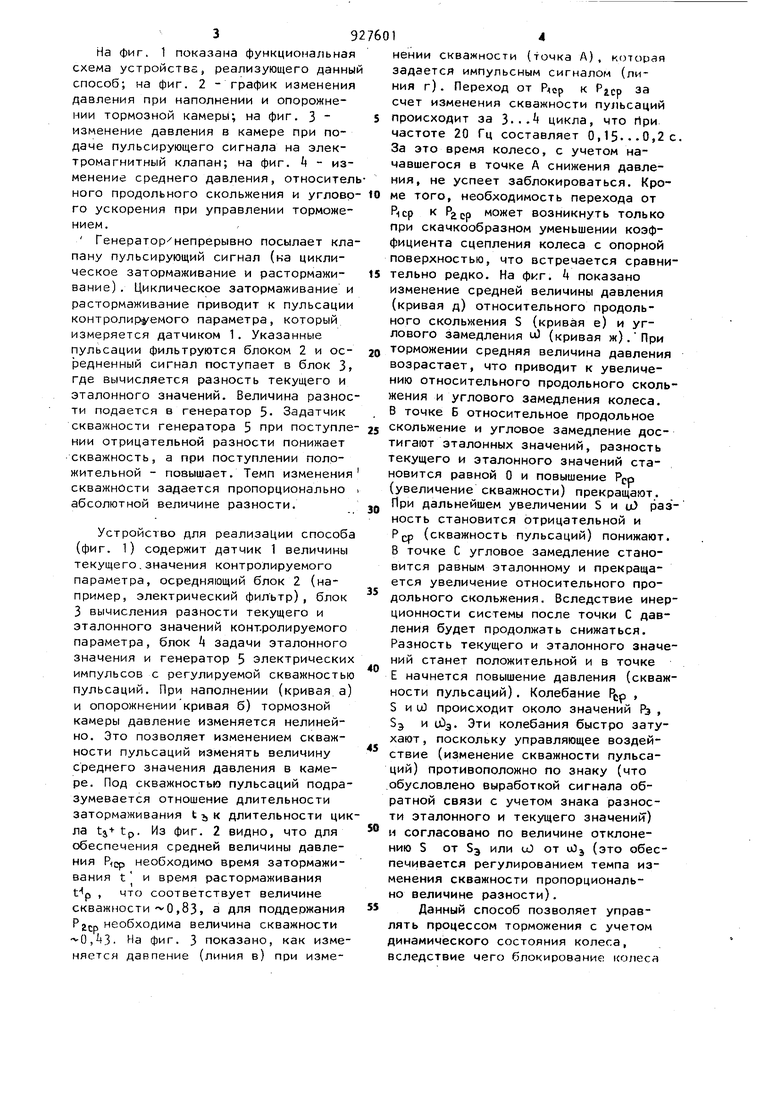
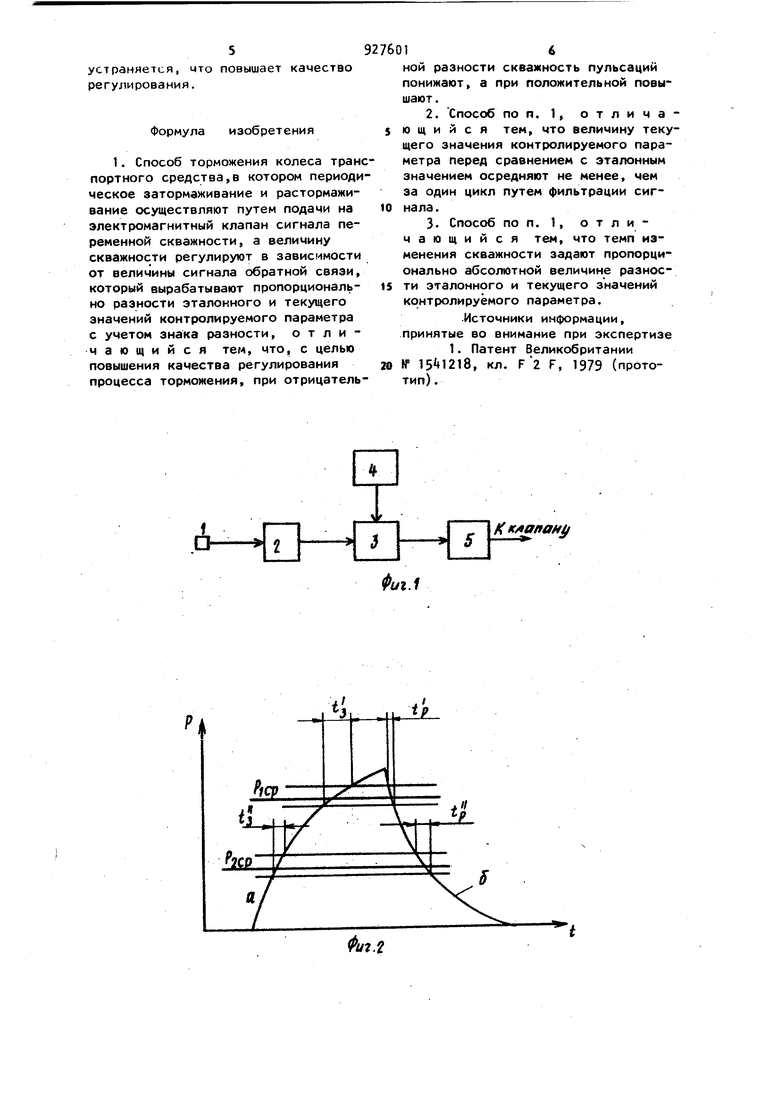
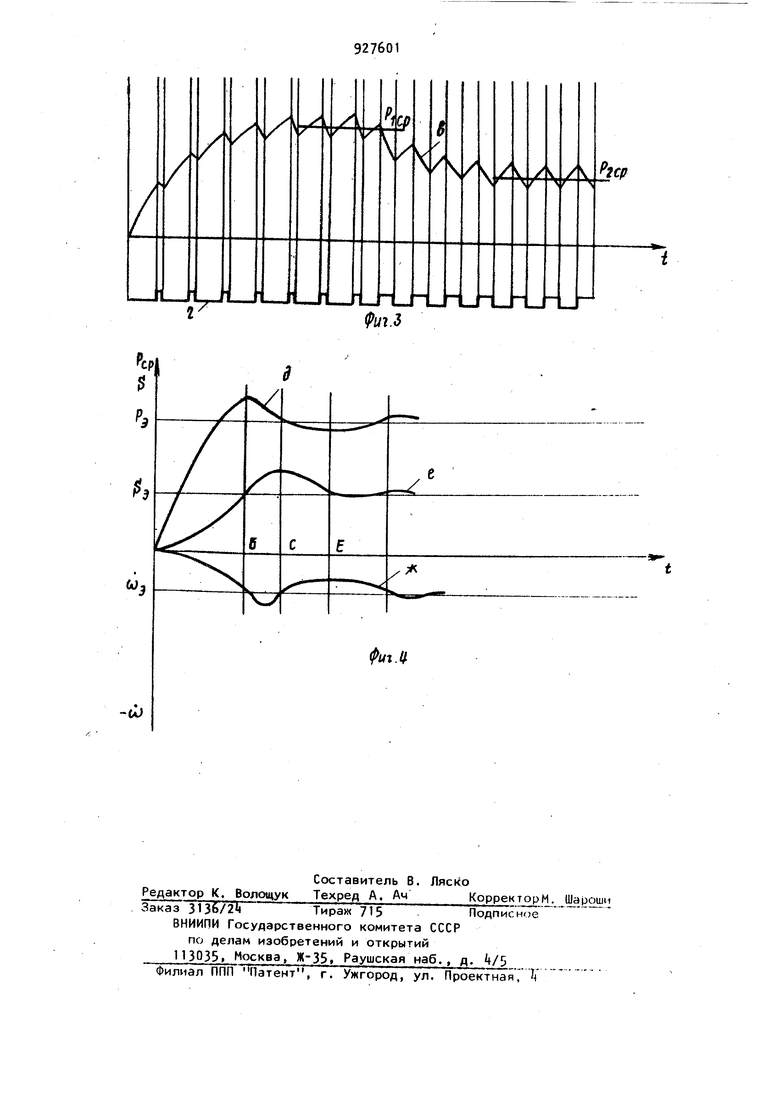
На фиг. 1 показана функциональная схема устройства, реализующего данный способ; на фиг. 2 - график изменения давления при наполнении и опорожнении тормозной камеры; на фиг. 3 изменение давления в камере при подаче пульсирующего сигнала на электромагнитный клапан; на фиг. - изменение среднего давления, относительного продольного скольжения и углового ускорения при управлении торможением.
Генератор/непрерывно посылает клапану пульсирующий сигнал (на циклическое затормаживание и растормажиаание). Циклическое затормаживание и растормаживание приводит к пульсации контролируемого параметра, который измеряется датчиком 1. Указанные пульсации фильтруются блоком 2 и осредненный сигнал поступает в блок 3 где вычисляется разность текущего и эталонного значений. Величина разности подается в генератор 5- Задатчик скважности генератора 5 при поступлении отрицательной разности понижает скважность, а при поступлении положительной - повышает. Темп изменения скважности задается пропорционально абсолютной величине разности.
Устройство для реализации способа (фиг. 1) содержит датчик 1 величины текущего,значения контролируемого параметра, осредняющий блок 2 (например, электрический фильтр) , блок 3 вычисления разности текущего и эталонного значений контролируемого параметра, блок А задачи эталонного значения и генератор 5 электрических импульсов с регулируемой скважностью пульсаций. При наполнении (кривая а) и опорожнении кривая б) тормозной камеры давление изменяется нелинейно. Это позволяет изменением скважности пульсаций изменять величину среднего значения давления в камере. Под скважностью пульсаций подразумевается отношение длительности затормаживания t т, к длительности цикла tj+ tp. Из фиг. 2 видно, что для обеспечения средней величины давления Picp необходимо время затормаживания t и время растормаживания fp , что соответствует величине скважности 0,83, а для поддержания необходима величина скважности 0,3. На фиг. 3 показано, как изменяется давление (линия в) при изменении скважности (точка А), которая задается импульсным сигналом (линия г) . Переход от Рдср к Pjcp за счет изменения скважности пульсаций происходит за 3... цикла, что г1ри частоте 20 Гц составляет 0,15...0,2 с. За это время колесо, с учетом начавшегося в точке А снижения давления, не успеет заблокироваться. Кроме того, необходимость перехода от Pfcp к Раср может возникнуть только при скачкообразном уменьшении коэффициента сцепления колеса с опорной поверхностью, что встречается сравнительно редко. На фиг. k показано изменение средней величины давления (кривая д) относительного продольного скольжения S (кривая е) и углового замедления иЗ (кривая ж). При 0 торможении средняя величина давления возрастает, что приводит к увеличению относительного продольного скольжения и углового замедления колеса. , В точке Б относительное продольное 5 скольжение и угловое замедление достигают эталонных значений, разность текущего и эталонного значений становится равной О и повышение Pj-p (увеличение скважности) прекращают. При дальнейшем увеличении S и о) разность становится отрицательной и РСР (скважность пульсаций) понижают. В точке С угловое замедление становится равным эталонному и прекращается увеличение относительного продольного скольжения. Вследствие инерционности системы после точки С давления будет продолжать снижаться. Разность текущего и эталонного значений станет положительной и в точке Е начнется повышение давления (скважности пульсаций). Колебание , S и lO происходит около значений РЭ , Sj и . Эти колебания быстро затухают, поскольку управляющее воздействие (изменение скважности пульсаций) противоположно по знаку (что обусловлено выработкой сигнала обратной связи с учетом знака разности эталонного и текущего значенийГ) и согласовано по величине отклонению S от 5э или jJ от lOj (это обеспечивается регулированием темпа изменения скважности пропорционально величине разности). 5 Данный способ позволяет управлять процессом торможения с учетом динамического состояния колеса, вследствие чего блокирование колеса устраняется, мто повышает качество регулирования. Формула изобретения 1. Способ торможения колеса тран портного средства,в котором периоди ческое затормаживание и растормаживание осуществляют путем подачи на электромагнитный клапан сигнала переменной скважности, а величину скважности регулируют в зависимости от величины сигнала обратной связи, который вырабатывают пропорционально разности эталонного и текущего значений контролируемого параметра с учетом знака разности, отличающийся тем, что, с целью повышения качества регулирования процесса торможения, при отрицатель 16 ной разности скважность пульсаций понижают, а при положительной повышают . 2.Способ по п. 1, отлича ю щ и и с я тем, что величину текущего значения контролируемого параметра перед сравнением с эталонным значением осредняют не менее, чем за один цикл путем фильтрации сигнала. 3.Способ по п. 1, отличающийся тем, что темп изменения скважности задают пропорционально абсолютной величине разности эталонного и текущего значений контролируемого параметра. Источники информации, принятые во внимание при экспертизе 1. Патент Великобритании , кл. ра F, 1979 (прототип).
(ааану
