(54) АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ МЕТАЛЛИЧЕСКИХ
I
Изобретение относится к подъемно-транопортному машиностроению, а именно к грузоподъемным устройствам металлообрабатывающих предприятий для транспортирования металлических листов.
Известно устройство для захвата и транспортирования металлических листов, включающее цепи и захват 1.
Строповка viHCTOB таким устройством, в основном, осуществляется вручную, что делает работу стропальщика малопроизводительной и физически тяжелой.
Известна также конструкция захвата для металлических листов, содержащая соединенный с поддерживающим и замолкающим канатами двухбарабанной лебедки крана. Г-образный корпус, на котором установлены фиксирующий электромагнит, выдвижной подхват и блок управления (2).
Недостатком этой конструкции является сложность отделения одного верхнего листа из пакета, так как электромагнит захватывает по 2-3 листа, что приводит к необходимости вручную отделять верхний лист и лишь после этого заводить под него выдвижной подхват.
ЛИСТОВ
Цель изобретения - повышение удобства в экcплyaтaцi и.
Поставленная цель достигается тем, что захват снабжен электромагнитом-распушителем, установленным на вертикальной части корпуса со стороны кромок захватываемых листов, и приводом выдвижения подхвата, при этом блок управления электрически связан с приводом поддерживающего и замыкающего канатов крана, с приводом выдвижения подхват; и с электрическими
10 цепями фиксирующего электромагнита и электромагнита-распушителя.
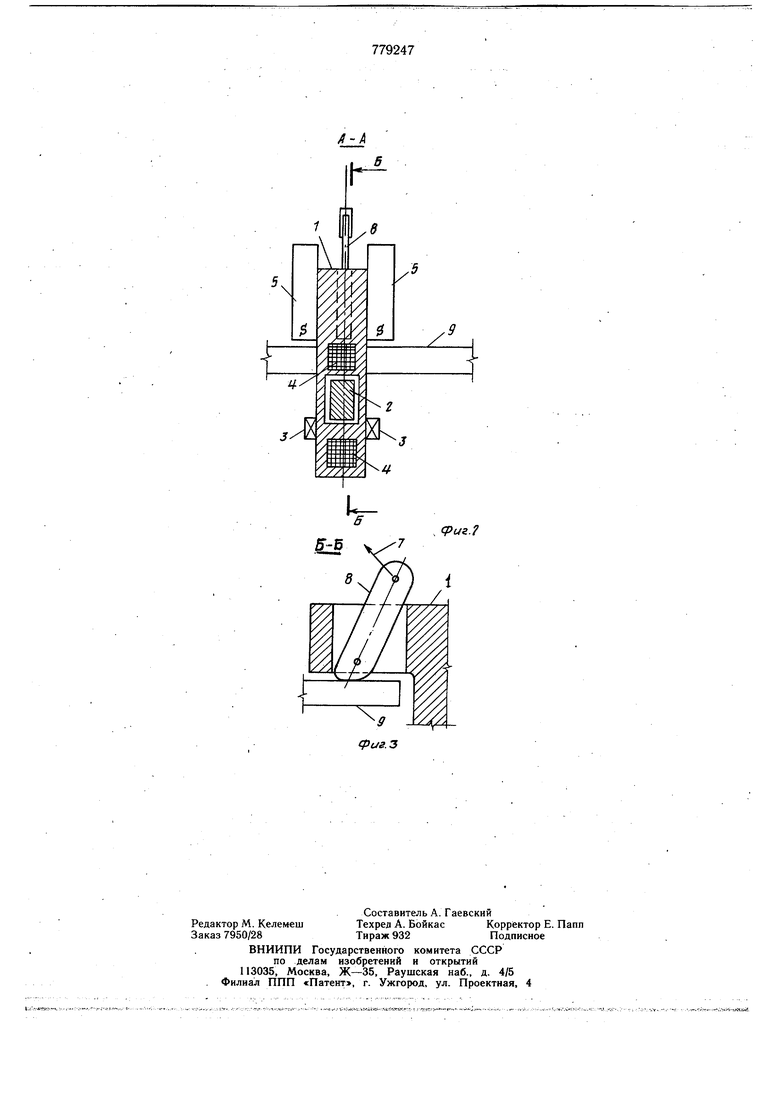
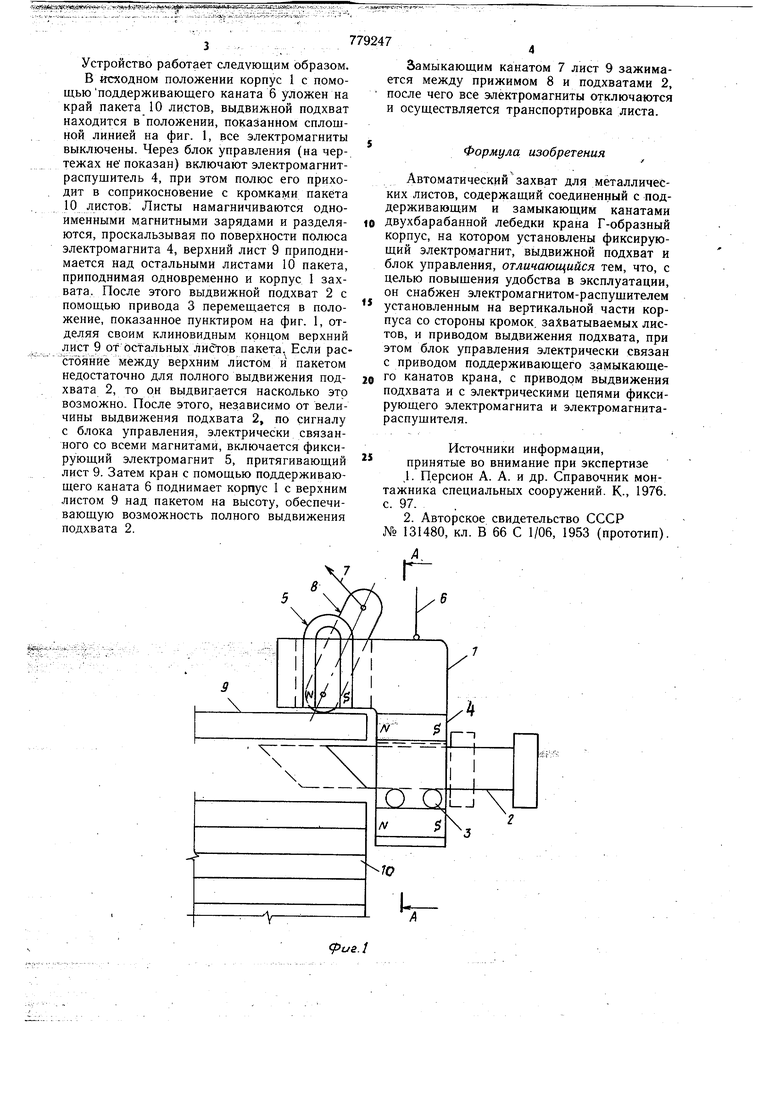
На фиг. 1 показан предлагаемый захват, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2;
Захват содержит Г-образный корпус 1,
15 на котором установлен выдвижной подхват 2 с приводом 3. На вертикальной части корпуса закреплен электромат-распределитель 4, а в верхней части - фиксирующий электромагнит 5. Поддерживающий канат 6 закреп:
20 лен непосредственно на корпусе, а замыкающий канат 7 соединен с верхним концом прижима 8. 9 - верхний захватываемый лист пакета 10 листов. Устройство работает следующим образом. В иг одном положении корпус 1 с помощьюподдерживающего каната 6 уложен на край пакета 10 листов, выдвижной подхват находится в положении, показанном сплощной линией на фиг. 1, все электромагниты выключены. Через блок управления (на чертежах не показан) включают электромагнитраспущитель 4, при этом полюс его приходит в соприкосновение с кромками пакета 10 листов; Листы намагничиваются одноименными магнитными зарядами и разделяются, проскальзывая по поверхности полюса электромагнита 4, верхний лист 9 приподнимается над остальными листами 10 пакета, приподнимая одновременно и корпус 1 захвата. После этого выдвижной подхват 2 с помощью привода 3 перемещается в положение, показанное пунктиром на фиг. 1, отделяя своим клиновидным концом верхний лист 9 от остальных листов пакета. Если расстояние между верхним листом и пакетом недостаточно для полного выдвижения подхвата 2, то он выдвигается насколько это возможно. После этого, независимо от величины выдвижения подхвата 2, по сигналу с блока управления, электрически связанного со всеми магнитами, включается фиксирующий электромагнит 5, притягивающий лист 9. Затем кран с помощью поддерживающего каната 6 поднимает корпус 1 с верхним листом 9 над пакетом на высоту, обеспечивающую возможность полного выдвижения подхвата 2.
779247 Замыкающим канатом 7 лист 9 зажимается между прижимом 8 и подхватами 2, после чего все электромагниты отключаются и осуществляется транспортировка листа. Формула изобретения Автоматический захват для металлических листов, содержащий соединенный с поддерживающим и замыкающим канатами двухбарабанной лебедки крана Г-образный корпус, на котором установлены фиксирующий электромагнит, выдвижной подхват и блок управления, отличающийся тем, что, с целью повыщения удобства в эксплуатации, он снабжен электромагнитом-распущителем установленным на вертикальной части корпуса со стороны кромок, захватываемых листов, и приводом выдвижения подхвата, при этом блок управления электрически связан с приводом поддерживающего 3|амыкающего канатов крана, с приводом выдвижения подхвата и с электрическими цепями фиксирующего электромагнита и электромагнитараспушителя. Источники информации, принятые во внимание при экспертизе ,1. Персион А. А. и др. Справочник монтажника специальных сооружений. К., 1976. с. 97. 2. Авторское свидетельство СССР № 131480, кл. В 66 С 1/06, 1953 (прототип). 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический электромагнитныйзАХВАТ | 1979 |
|
SU839969A1 |
| Магнитоподхватное устройство | 1990 |
|
SU1761653A1 |
| Крановый захват для пакета изделий с центральным отверстием, например, автомобильных покрышек | 1959 |
|
SU131060A1 |
| Грузозахватное устройство | 1989 |
|
SU1731717A1 |
| Устройство для захвата и транспортирования листового материала | 1977 |
|
SU733941A1 |
| Магнитно-механическое захватное устройство | 1975 |
|
SU557030A1 |
| Механизированная крепь для погашения горных выработок | 1990 |
|
SU1749473A1 |
| Захват для листовой стали | 1960 |
|
SU131480A1 |
| Грузозахватное устройство | 1977 |
|
SU742335A1 |
| Траверса | 1985 |
|
SU1284932A1 |