(54) ША1РВЫЙ ШИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый привод для малых перемещений | 1979 |
|
SU861766A1 |
| Микроманипулятор | 1990 |
|
SU1803066A1 |
| Устройство для проведения микроопераций на клетках и способ проведения микроопераций на клетках | 1981 |
|
SU1088171A1 |
| Микроманипулятор | 1986 |
|
SU1390013A1 |
| Микроманипулятор | 1982 |
|
SU1229030A1 |
| Шаговый привод для малых перемещений | 1976 |
|
SU612075A1 |
| КЛАПАН | 2004 |
|
RU2282770C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ДИСКРЕТНОГО УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2445517C2 |
| Гибкое адаптивное зеркало | 1986 |
|
SU1582169A1 |
| УСТРОЙСТВО ФОРМОВАНИЯ | 2002 |
|
RU2251464C2 |
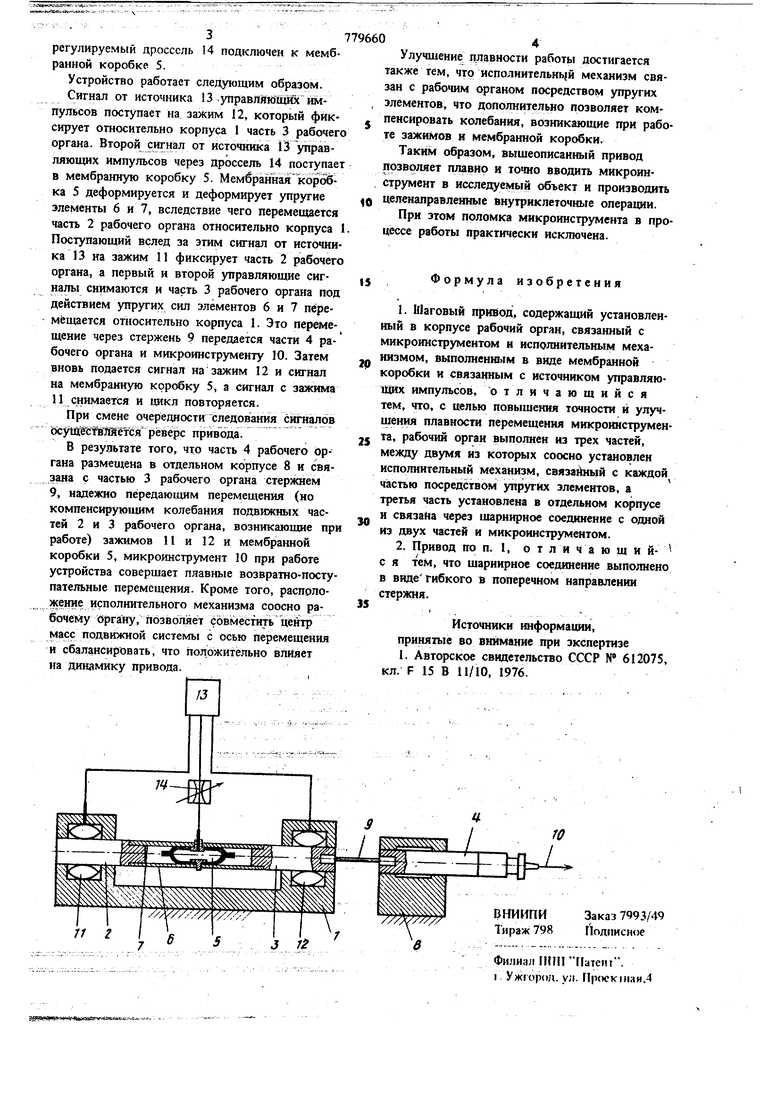
. {..: Изобретение может быть использовано для перемещения MHKpoHHCtpyKteHni в дистанцнсжно управляемых MHKpoMaHmiynflTopaxi нашедапос широкое применение в биоф} ике, , цитологии и медицине. Известен шаговый привод, соде{йшций уста иовленный в корпусе { бочий оргдн, связашый с мИкроииструмеЛЙом и йсполшггельиый Mieix низмом, выполнеинь1м в виде мембранной коробки и связа й1ым с источшйсом ytipaeniDdщих импульсов П.- , ; :: Недостаток .известного шагового привода - иедостаточиая плавность и точность nepeMeaieНИН рабочего органа, что приводит к поломке микроинструмента или не позволяет щлеаяйрял леино производить внутриклеточные операции. Цель изобретения - повьтшение точности и улучшение плавностн перемещения микроинстру мента. Поставленная цель достигается тем, что рабочий орган вьшолнен из трех частей, между двумя из которых соосно установлен исполнительный механизм, связанный с каждой частью посредством упругих эпЁментов, а грёпя часть .ус1ш(яи1ена 13 отдет и н корпусе и связана через шартфное соедиИенне с одной из двух час1ей и лоосрййнструментом. Кроме тото, соещшение выполиеНо в виде гибкого в поперечиом направлении Ьтёржня. На чертеже представлена принципиальная схема шагового привода. Шаговый привод состоит из корпуса 1, в KOtopoM установлен рабочий оргаи, выполненный и трех частей 2, 3 и 4. Между частями 2 и 3 рабочего органа соосно им установлен исполниteльиый Nfexaiffl3M, выполненньт в виде мембранной коробки 5 и связанный с ними посредслаом упругих элементов 6 и 7, а часть 4 раС очего органа гстановлена в.отде1киом корпусе 8 и связана с частью 3 через шарнирное соединение, выполиениое в виде гибкого в поперечиом направлении стержня 9. С частью 4 рабочего органа. жестко связан микроинструмент 10. В корпусе 1 установлены зажимы 11 и 12,которые связаны с источником 13 управляющих импульсов, причем последний через
