ш
сл
со
(
СО
Изобретение относится к микроманипу- ляционной технике, применяемой в биологии и медицине для микрохирургических работ над клетками и тканями.
Цель изобретения - повышение точности манипулирования.
На чертеже изображен микроманипулятор, общий вид.
Микроманипулятор содержит привод продольного перемещения с пневматической мембранной коробкой 1, приводы поперечных взаимно перпендикулярных перемещений с мембранными коробками 2 и 3, которые через тяги, образованные упругими стержнями 4, соединены с одним концом вала 5, связанного с основанием с помощью двухстепенного щарнира 6 или плоской мембраны (не показана), закрепленной на основании и жестко связанной с валом 5. Мембранная коробка 1 закреплена на другом конце вала 5 и с помощью упора 7 перемещает исполнительный орган, который устанавливается на стержне 8. Последний установлен на П-образных скобах 9, выполненных из плоских пружин, поверхности боковых сторон которых расположены перпендикулярно оси вала 5. Скобы 9 закреплены одними своими сторонами на кронщтей- не 10, жестко связанном с валом 5, а другими крайними сторонами - со стержнем 8. Мембранные коробки связаны с источником давления (не показан).
Микроманипулятор работает следующим образом.
При подаче давления, например, в мембранную коробку 2 поперечного перемещения исполнительного органа, которая при этом, воздействуя через тягу на вал 5, поворачивает его в щарнире 6 в горизонтальной плоскости. При этом два упругих стержня 4 тяги мембранной коробки 3 изгибаются и не препятствуют этому перемещению, исключая тем самым выход кончика микроинструмента при манипулировании из горизонтальной плоскости. Аналогичным образом действует тяга мембранной коробки 2 при управлении валом от мембранной коробки 3, обеспечивая манипулирование микроинструментом только в вертикальной плоскости.
Мембранная коробка 1 через скобы 9 обеспечивает прямолинейное продольное перемещение исполнительного органа, при этом ее упор 7, воздействуя на одну из крайних сторон скоб 9, смещает жестко связанный с ними стержень 8 в продольном направлении.
Для исключения влияния непрямолинейности движения упора 7 из-за разной жесткости мембраны в мембранной коробке 1 (что обычно характерно для пневматических мембранных коробок) сферический конец упора имеет возможность скольжения по плоской поверхности стороны скобы 9.
Формула изобретения
0
5
0
1.Микроманипулятор, содержащий три выполненных в виде пневматических мембранных коробок привода исполнительного органа, два из которых предназначены для взаимно перпендикулярных перемещений и связаны с помощью тяг с валом, несущим исполнительный орган, и средство для соединения вала с основанием, отличающийся тем, что, с целью повышения точности манипулирования за счет устранения взаимного влияния приводов, он снабжен кронштейном, жестко связанным с валом, двумя П-образными скобами, выполненными из плоских пружин, поверхности боковых сторон которых расположены перпендикулярно оси
0 вала, причем соседние стороны скоб жестко связаны с кронштейнами, а крайние - с исполнительным органом, при этом каждая тяга выполнена в виде двух параллельных, упругих стержней, одни концы которых жестко связаны между собой, а другие - соот5 ветственно с мембранной коробкой и с одним концом вала, на другом конце которого с возможностью взаимодействия с одной из крайних сторон скоб установлена мембранная коробка третьего привода.
2.Микроманипулятор по п. 1, отличающийся тем, что средство для соединения вала с основанием выполнено в виде двухстепенного щарнира.
3.Микроманипулятор по п. 1, отличающийся тем, что средство для соединения
5 вала с основанием выполнено в виде плоской мембраны, закрепленной на основании и жестко связанной с валом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор для микрохирургии | 1984 |
|
SU1238016A1 |
| Микроманипулятор | 1990 |
|
SU1803066A1 |
| Устройство для манипулирования объектами в закрытой камере | 1987 |
|
SU1472248A1 |
| Устройство для проведения микроопераций на клетках и способ проведения микроопераций на клетках | 1981 |
|
SU1088171A1 |
| МИКРОХИРУРГИЧЕСКОЕ КРЕПЕЖНОЕ УСТРОЙСТВО (ВАРИАНТЫ) И МАНИПУЛЯЦИОННЫЙ ТОЛКАТЕЛЬ ДЛЯ ЕГО УСТАНОВКИ | 1996 |
|
RU2108070C1 |
| Микроманипулятор | 1987 |
|
SU1458206A1 |
| Микроманипулятор | 1984 |
|
SU1766647A1 |
| Шаговый привод для малых перемещений | 1979 |
|
SU861766A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| Микроманипулятор | 1982 |
|
SU1102669A1 |
Изобретение относится к микромани- пуляционной технике, применяемой в биологии и медицине для микрохирургических работ над клетками и тканями. Целью изобретения является повышение точности манипулирования за счет устранения взаимного влияния приводов. Перемещение исполнительного органа микроманипулятора происходит при подаче давления в мембранные коробки 1, 2 и 3 приводов соответственно продольного и поперечных взаимно перпендикулярных перемещений. При этом мембранные коробки 2 и 3 связаны с валом 5, несущим мембранную коробку 1, с помощью тяг, образованных упругими стержнями 4, исключающими взаимное влияние приводов поперечного перемещения. Исполнительный орган микроманипулятора устанавливается на стержне 8, закрепленном между крайними сторонами скоб 9, выполненных из упругого материала. 2 з.п.ф-лы, 1 ил.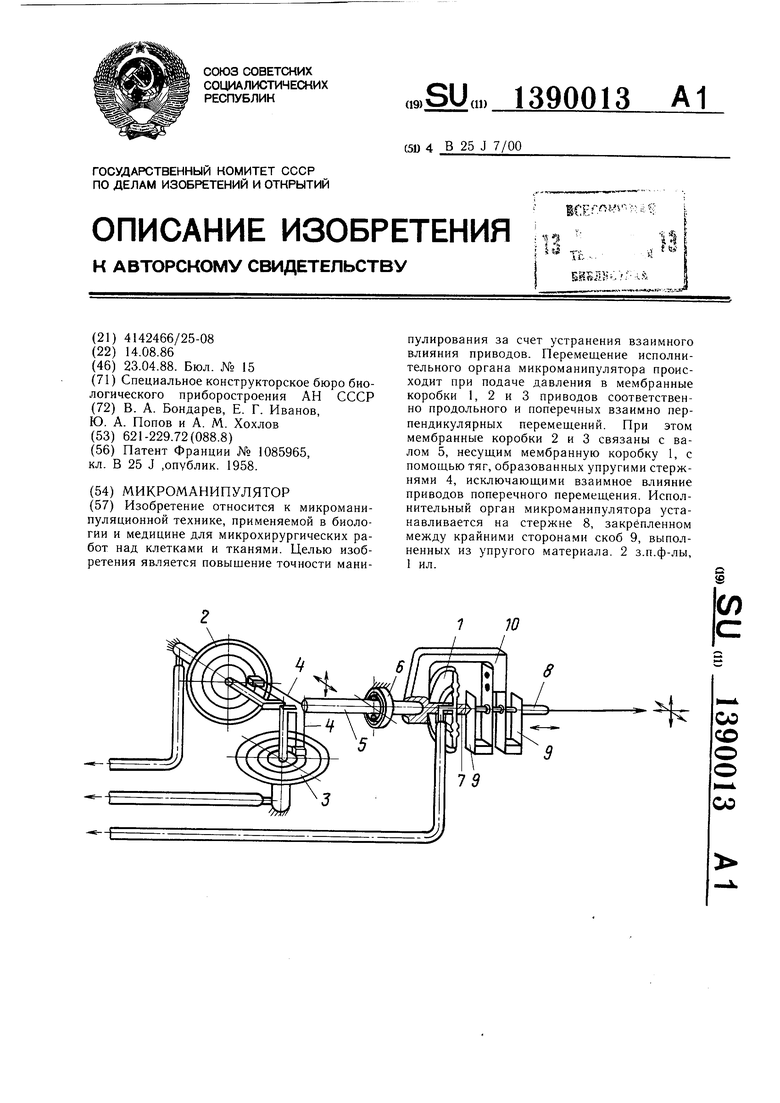
| Способ изготовления штырьковых гермовводов | 1982 |
|
SU1085965A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Реактивная дисковая турбина | 1925 |
|
SU1958A1 |
