оворотном стакане 11 закреплены (фиг. 1) на стойке 13 губки 14 и 15, оторые через тяги 16-17 и хомут 18 инематически связаны со штоком мембайного пневмопривода 9. Аналогичным бразом на поворотном стакане 12 зареплены на стойке 19 губки 20 и 21, которые через тяги 22-23 и (условно не показан) кинематически связаны со штоком мембранного пневопривода 10.
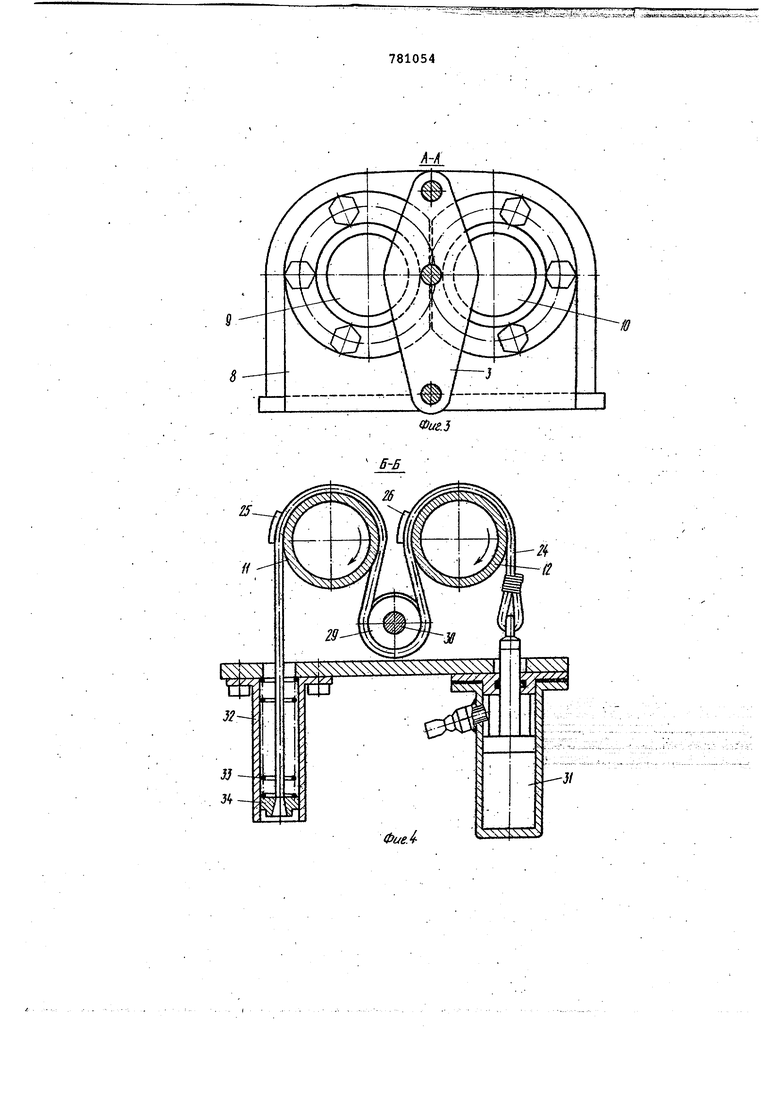
Пневмопривод- 9 со стаканом 11, стойкой 13, губками 14 и 15, тягами 16-17 и хомутом 18, установленным с возможностью вращения на штоке пневопривода 9 -.образуют схват(фиг. 1 и 2) . Аналогично другой схват образуют - пневмопривод Ю со стаканом 12, стойкой 19, губками 20 и 21, тягами 22, 23 и хомутом (условно не показан) , установленным с возможностью вращения на штоке пневмопривода 10, Схваты установлены на корпусе 8 кисти, причем стаканы 11 и 12 вместе с губками 14-15 .и 20-21 могутраз ворачиваться относительно кисти тросиковрй передачей, которую составляют (фиг. 2 и 4) - тросик 24, закрепленный на каждом из стаканов 11 и 12 один ковыми зажимами 25 и 26, упоры 27 и28 (фиг. 2 и 5), закрепленные на корпусе 8 кисти, пневмопривод 31, к штоку которого закреплен тросик 24, и возвратный механизм, включающий стакан 32, пружину 33 и шайбу 34, в которой закреплен конец тросика 24.
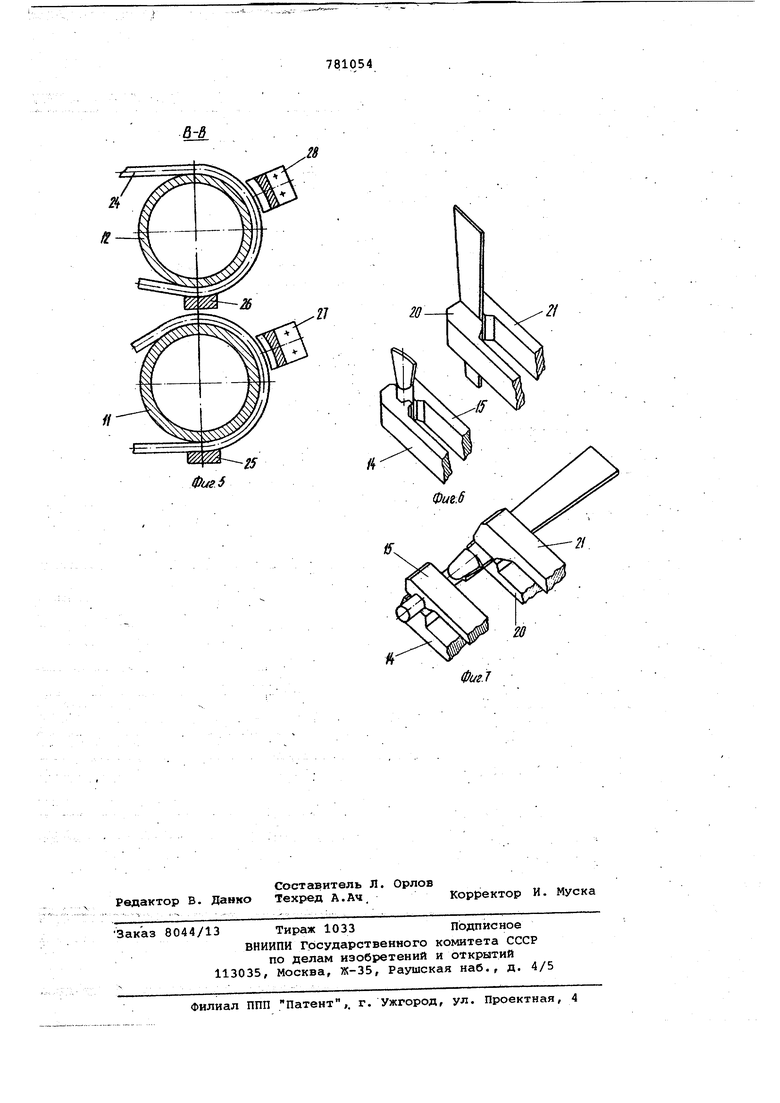
Работает исполнительный орган следующим образом - при подаче.воздуха в пневмопривод 2 (через нижний на фиг. 1 и 2 штуцер) кисть исполнительного органа, установленная на фланце 3 (фиг. 3), перемещается штоком пневмопривода 2на рабочую позицию.- На последней воздух одновременно подается в к&меры пневмоприводами 9 и 10 схватов кисти. При этом .движение каж-. дои мембраны со штоком передается через хомут 18 (другой хомут условно не показан), тяги 16-17 и 22-23 губками 14-15 и 20-21, которые осуществляют захват и удержание деталей (фиг. 6). Затем подача воздуха в пневмопривод 2 переключается (воздух подается через верхний на фиг . 1 и 2 штуцер), и кисть с удерживаемыми схватами в губках 14-15 и 20-21 перемещается в исходное положение. Здесь воздух из пневмосети подают в пневмопривод 31 (фиг. 4). При этом с движением поршня со штоком пневмопривода 31, преодолевая усилие пружины 33 возврат/ ного механизма, тросик 24,закрепленный зажимами 25 и 26 на стаканах 11 и 12 схватов Кисти, также движется и поворачивает стаканы 11 и 12 вместе с установленными на них губками (фиг. 7), связанными с тягами и хомутами. При этом хомуты (18 идругой, условно не показанный) свободно поворачиваются на штоках своих пневмоприводов 9 и 1Q. Поворот стаканов 11 и 12 с губками 14-15 и 20-21 будет осуществляться до соприкосновения зажимов 25 и 26 с упорами (фиг. 5) 27 и 28 (положение последних может быть изменено для достижения необходимого угла разворота и совмещения .удерживаемых губками деталей).
Благодаря наличию паразитного ролика 29, установленного на оси 30, поворот стаканов 11 и 12, А, значит, в целом схват с деталями, осуществляется в одну сторону.
После завершения описанных выше манипуляций рука робота с установленным на основании 1 (фиг.1 и 2) испол- , Нительным органом переводится на новую рабочую позицию, где детали, находящиеся в губках 14-15 и 20-21, уже в совмещенном положении (фиг. 7), подвергаются очередной технологической операции, например, сварке .(сборке) . По окончании последней, воздух из камер пневмоприводов 9 и 10 стравливается. Под действием пружин мембраны со штоками этих приводов возвращаются в исходное положение, в результате чего губки схватов раскрываются и собранный узел удаляется специальным механизмом (на чертежах не показан). После этого стравливается воздух и из цилиндра пневмопривода 31. При этом пружина 33 перемещает по направляющему стакану 32. шайбу 34 с закрепленным в ней тросиком 24, который возвращает в исходное положение стаканы схватов с губками и исполнительный орган готов к повторению цикла.
. Таким образом исполнительный орган обеспечивает захват и плавное манипулирование деталями, т. е . выт полняетгамму операций для осуществления совмещения, например,,винта (с фигурной головкой) с плавкой перед их сваркой (фиг. 6 и 7). При этом детали надежно фиксируются в губках.Исполнительный орган отличается высоким быстродействием,широким спектром движен)1й, возможностью манипулирования деталями в плоскостях, регулирования усилия зажима деталей при изменении давления питающего воздуха, обеспечивается возможность перенастройки на работу с.различными деталями путем смены губок.
Формулаизобретения
1. Исполнительный орган промышленного робота, содержащий предплечье, кисть и схваты с зажимными губками, . снабженными индивидуальными приводами, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен установленными на кисти стаканами, в которь1Х смонтированы схваты, приводом синхрон ного поворота стаканов и приводом возвратно-поступательного перемещения кисти.
2. Исполнительный орган по п . 1, отличающийся тем, что привод синхронного поворота стаканоё выполнен в виде передачи с гибким тросиком и паразитным роликом, причем
тросик закреплен на каждом стакане и проходит через паразитный ролик.
Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промышяенныё роботы, м., Машиностроение, 1975, с. 200, рис. 110.

| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1990 |
|
SU1717342A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Захватное устройство | 1984 |
|
SU1222542A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |

/
Г
//
Щ
|| 11 « I XV I
n f) Я ft JL,
-il
-H
u (T5
Фиг. 2
781054
25Фие.4Фиг б
