11
Изобретение относится к машиностроению, и может 6fjiTb использовано в манипуляторах, преимущественно для подачи заготовок винтов в рабочую зону резьбонакатного станка.
Целью изобретения является повышение надежности работы путем обеспечения заданного положения губок при отключенном приводе.
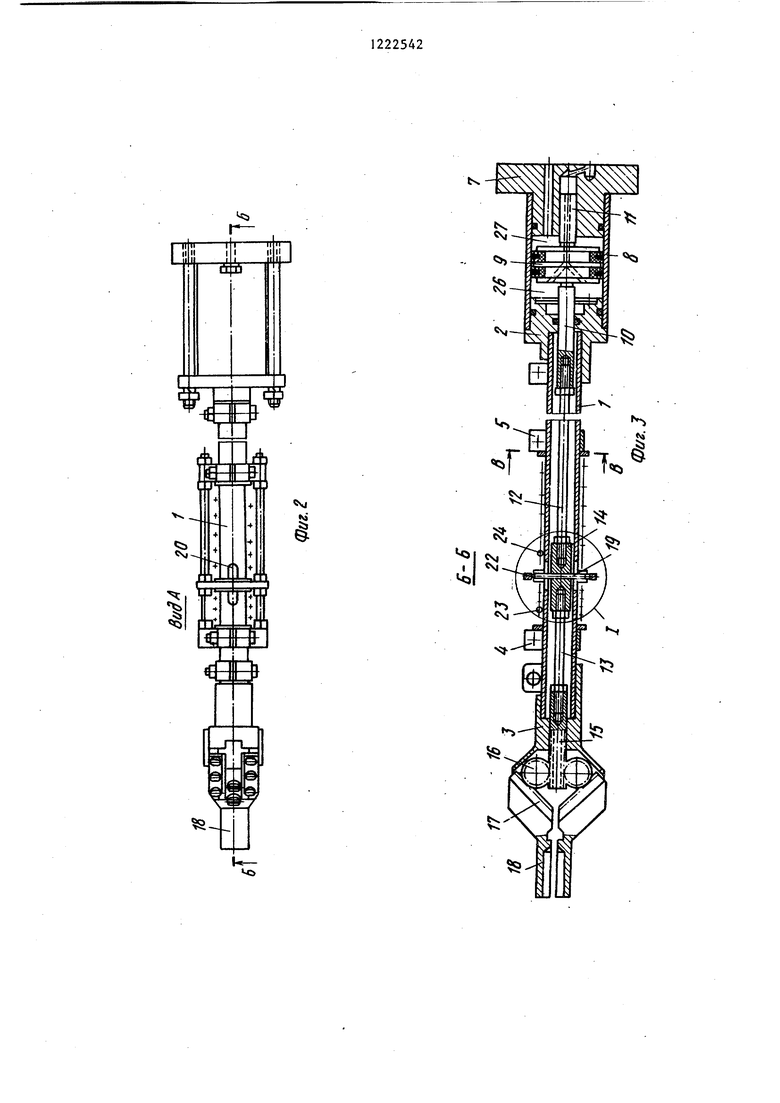
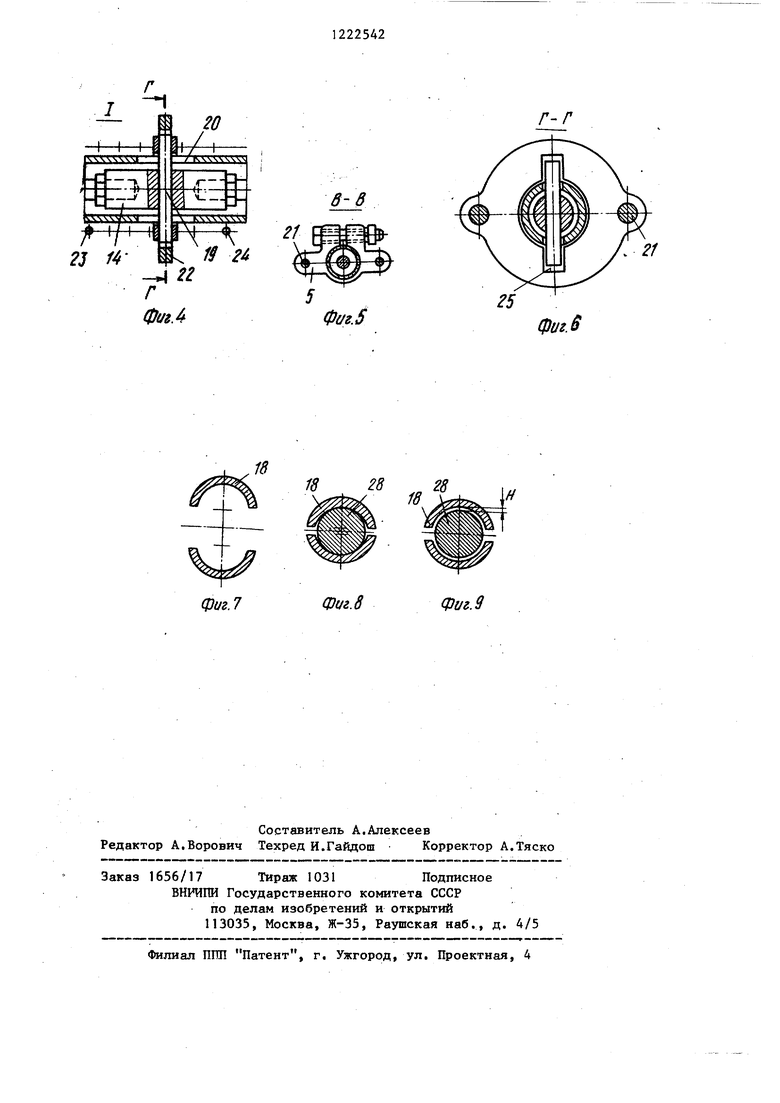
На фиг. изображено захватное устройство, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг.2; на фиг.А - узел Т на фиг.З-; на фиг.З - сечени В-Б на фиг.З; на фиг.6 - се щние Г-Г на фиг.4; на фиг.7 - губки захватного устройства в открытом положении, поперечное сечение; на фиг.8 - то же, в закрытом положении, в момент зажима детали; на фиг.9 - то же, в приоткрытом положении, с образованием зазора между губками и деталью.
Захватное устройство содержит полый трубчатый корпус 1, на котором закреплены муфта 2, головка 3 и хомуты А и 5. Муфта 2 соединена йпиль- . ками 6 с крьшкой 7. Между муфтой 2 и крышкой 7 установлен цилиндр 8 привода, в котором смонтирован поршень 9 со штоками 10 и 11, причем шток 11 входит в осевое отверстие крьш1ки 7. Шток 10 соединен через тяги 12 и 13 и гайку 1А с двухсторонней зубчатой рейкой 15, кинематически соединенной через зубчатые колеса 16 с зубчатыми рейками 17 зажимных губок 18. В гайке 1А закреплен палец 19, проходящий через пазы 20 в корпусе 1. Хомуты А и 5 соединены резьбовыми- шпильками 21, на которых закреплено кольцо 2. На корпусе 1 установлены пружины 23 и 2А, размещенные между кольцом 22 и хомутами А и 5. В кольце 22 выполнены окна 25, сквозь которые свободно проходят концы паль ца 19. В цилиндре 8 образованы рабочие полости 26 и 27, причем полость 26 соединена с источником давления через каналы в поршне 9 и штоке 1I.
Захватное устройство работает следующим образом.
Поочередным перемещением хомутов А и 5 вдоль корпуса регулируют силу
25А22
сжатия пружин 23 и 2А, которые, воздействуя на палец 19, перемещают его в плоскость кольца 22 и, опираясь на нее, удерживают палец в заданном по5 ложении. Таким образом через подвижные элементы палец 19 удерживает губки 18 разведенными на заранее заданный размер, обеспечивающий, например, необходимый минимальный зазор Н меж0 ду деталью и губками схвата при накате резьбы на детали. Такой зазор сохраняется постоянно при отсутствии избыточного давления в рабочих полостях 26 и 27 цилиндра 8. Для packpытия
15 зажимных губок 18 воздух под давлением подают в полость 27. Поршень 9 и связанные с ним подвижные элементы перемещаются (на чертеже влево)и через зубчато-реечные передачи 15-17
20-разводят губки 18, при этом пружина 23 сжимается пальцем 19. Дпя зажима детали. 28 воздух подают в полость 26, а полость 27 соединяют с атмосферой. Поршень 9 и связанные с ним подвиж25 ные элементы перемещаются (на чертеже вправо) и губки 18 с помощью передачи 15-17 сводятся и зажимают деталь 28, при этом пружина 23 разжимается до упора с кольцом 22, а пру30 жина 23 сжимается пальцем 19, выходящим через окна 25 из плоскости кольца 22. Б таком положении губок 18 деталь 28 транспортируется в рабочую зону станка. Перед началом процесса резь35 бонакатывания полость 26 соединяют с наружной средой. Под действием пружины 2 А подвижные элементы устанавливаются в ранее отрегулированное положение, палец 19 входит в плоскость
40 кольца 22, пружина 2А упирается в кольцо 22 и между деталью 28 и стенками зажимных губок 18 образуется ранее отрегулированный зазор Н,
Положение пружин 23 и 2А может
45 быть отрегулировано также таким об- .разом, что после сброса давления в полости 26 деталь 28 остается зажатой с некоторым ранее заданным усилием действием пружины 23 на палец 19.
50 Захватное устройство позволяет повысить надежность работы робото- технического комплекса накатки резьбы на винтах.
С
axi
о
3-3
Фа г. 5
Фиг.В
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1987 |
|
SU1440707A2 |
| Схват | 1986 |
|
SU1390021A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Двухзахватная механическая рука | 1987 |
|
SU1567351A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Автооператор | 1982 |
|
SU1057237A1 |

18
фиг. 7
Фиг.в
Фиг. 9
| Схват промышленного робота | 1979 |
|
SU831614A1 |
