Изобретение относится к роботостроению.
Цель изобретения - расширение технологических возможностей.
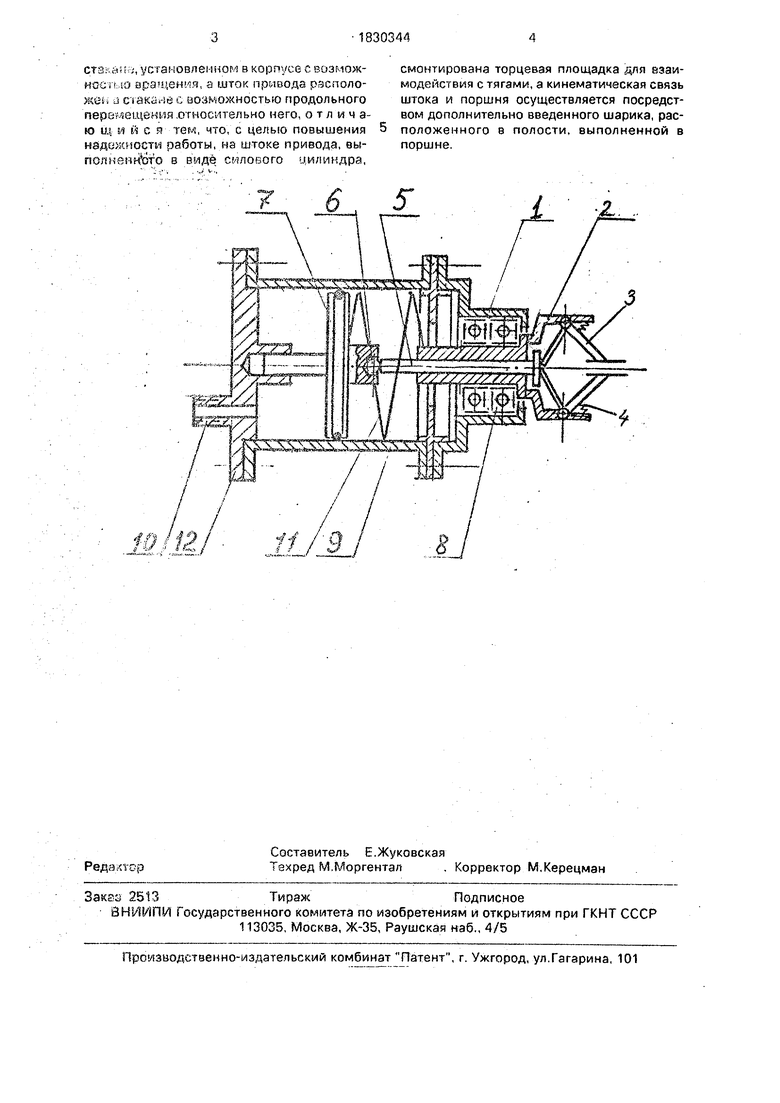
Сущность изобретения поясняется чертежом, где изображен общий вид схвата.
Схват состоит из корпуса 1, шарнирно закрепленных на оси стакана 2 зажимных губок 3. подпружиненных пружиной 4. Зажимные губки опираются на шток 5, а шток - на шарик 6, установленный в полости поршня 7. Стакан установлен на подшипниках 8, расположенных в корпусе пневмогидро- цилиндра 9. Сжатый воздух или жидкость подаются в цилиндр через штуцер ТО. а возврат поршня происходит под воздействием пружины 11. Цилиндр снабжен фланцем 12 для крепления его на оборудовании.
Работает схват следующим образом.
Сжатый воздух или жидкость подается через штуцер в цилиндр и перемещает поршень вправо, одновременно перемещаются шарик и шток, который нажимает на зажимные губки и отводит их. После удаления воздуха (или жидкости) пружина 11 возвращает поршень, а пружины 4 возвращают зажимные губки и шток. Зто движение зажимных губок позволяет захватить и освободить деталь. Но при вращении захватываемой детали в данном схвате зажимные губки, захватившие деталь, имеют возможность вращаться вместе с деталью относительно цилиндра так. как они установлены в стакане, способном вращаться с малым сопротивлением. Цилиндр с помощью фланца неподвижно закреплен на оборудовании.
Т.о. данный схват обеспечивает свободное вращение захваченной детали, что бывает необходимо, например, при захвате детали, находящейся в патроне токарного станка, т.е. увеличивается производительность работы.
Формула изобретения Схват промышленного робота, содержащий корпус с приводом, шток которого связан с зажимными губками посредством тяг, размещенных на губках, при этом зажимные губки шарнирно смонтированы на
™А
00 CJ
о
СА) |Ьь Јь
стали н-i, установленном в корпусе с возмож- ноетыо вращения, а шток привода расположен и стакане с возможностью продольного перемещения .относительно него, о т л и ч з- ю щ и и с я тем, что, с целью повышения надежности работы, на штоке привода, вы- полненй о то в виде силового цилиндра,
смонтирована торцевая площадка для взаимодействия с тягами, а кинематическая связь штока и поршня осуществляется посредством дополнительно введенного шарика, расположенного в полости, выполненной в поршне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1990 |
|
SU1771955A1 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149097C1 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2218269C2 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Сборочная резьбозавертывающая головка | 1980 |
|
SU921756A1 |
| Схват манипулятора | 1981 |
|
SU960008A1 |
| Схват | 1983 |
|
SU1138313A1 |
Изобретение относится к роботостроению. Целью изобретения является расширение технологических возможностей. Для обеспечения свободного вращения захваченной детали относительно корпуса устройства схват снабжен стаканом, на котором шарнирно закреплены зажимные губки. Шток привода расположен в стакане с возможностью продольного перемещения относительно него. Связь поршня со штоком осуществляется посредством дополнительно введенного шарика, расположенного в полости поршня. При перемещении поршня вправо зажимные губки, опирающиеся на шток, раскрываются. При обратном перемещении поршня зажимные губки захватывают деталь. 1 ил.
| Авторское свидетельство СССР № 1484710, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
