Изобретение относится к машиностроению и предназначено для автоматизации технологических процессов транспортировки, укладки, сборки на основе применения роботов с различными захватными устройствами.
Цель изобретения - упрощение конструкции и расширение эксплуатационных возможностей путем переналадки исполнительного органа.
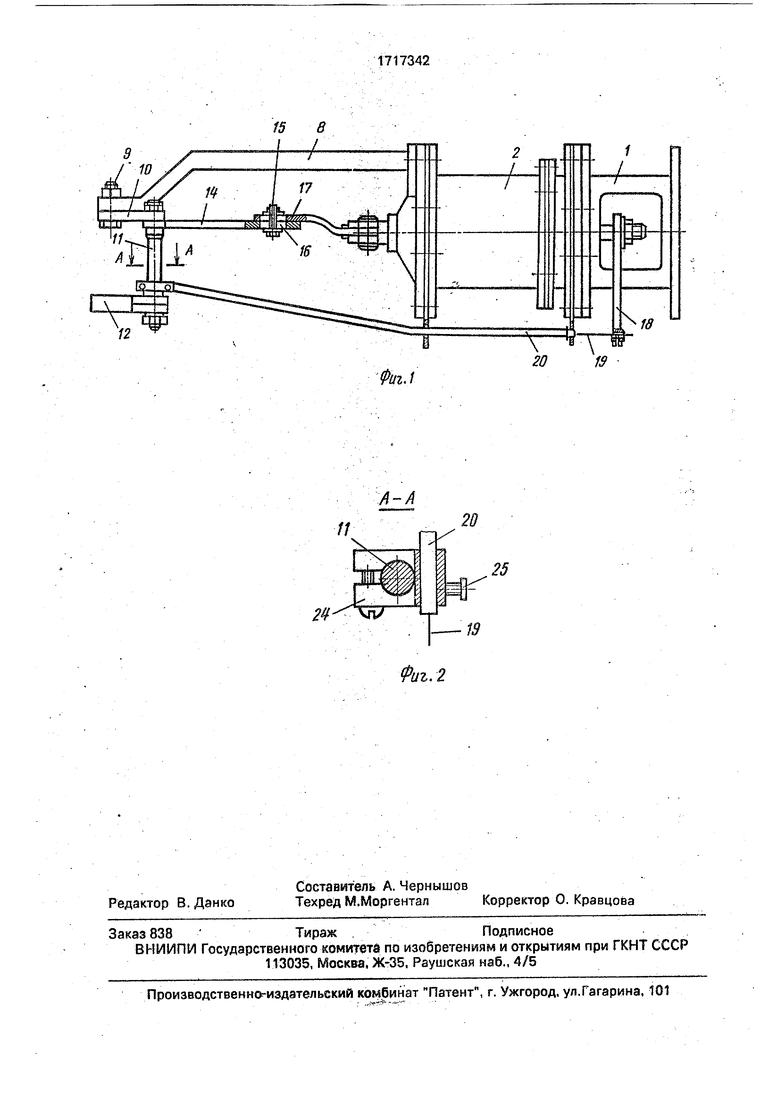
На фиг. 1 изображен исполнительный орган, вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - исполнительный орган, вид сверху с частичными вырывами.
Исполнительный орган содержит основание 1, на котором установлены комбинированный пневмопривод 2, включающий пневмоцилиндр 3 с выходным штоком 4 и пневмокамеру 5 со штоком б и пружиной 7, кисть 8 с установленными на ней на осях 9 схватами, включающими подвижные кронштейны 10, стойки 11с установленными на них рычагами 12, подпружиненными пружинами 13. На стойках 11 подвижно установлены тяги 14, которые жестко скреплены болтовым соединением 15с возможностью переустановки в пазах 16 стягами 17, шар- нмрно установленными на выходном штоке 4 пневмоцилиндра 3. На штоке 6 пневмока- меры 5 установлена жесткая планка 18, на которой закреплены одним концом тросики 19, расположенные в гибкой оплетке 20, а другие концы тросиков 19 закреплены в рычагах 12 болтами 21, причем гибкие оплетки 20 тросиков 19 проходят через планки 22,23 и закреплены винтами 25 в хомутах 24, расположенных на стойках 11. .
Пневмоцилиндр 3 снабжен штуцерами 26 и 27, а пневмокамера 5 - штуцером 28 для подачи сжатого воздуха.
Исполнительный орган работает следующим образом.
На исходной позиции захвата деталей сжатый воздух через штуцер 28 подается б пневмокамеру 5, При этом.ее шток 6 перемещается вправо вместе с закрепленной на нем планкой 18, в которой закреплены тросики 19. Последние перемещаются также вправо внутри своих гибких оплеток 20, и,
преодолевая усилие пружин 13, рычаги 12 осуществляют захват и зажим деталей. В процессе переноса деталей с исходной позиции или при переходе исполнительного
органа на рабочую позицию сжатый воздух подается через штуцер в пневмоцилиндр 3. При этом поршень со штоком 4 перемеа - ется влево и через тяги 17 и 14 и кронштейны 10 поворачивает рычаги 12 со стойками
11 на определенный угол, после чего исполнительный орган устанавливает детали на рабочую позицию. По окончании установки деталей воздух из пневмокамеры 5 стравливают, и шток 6 пружиной 7 возвращается в
исходное положение, в результате чего, а также под действием пружин 13 рычаги 12 разжимаются. Исполнительный орган переводят опять на исходную позицию, при этом воздух из пневмоцилиндра 3 стравливают, а
через штуцер 26 подают сжатый воздух, чтобы привести схваты в исходное положение. После этого исполнительный орган повторяет цикл своей работы.
Формула изобретения
1. Исполнительный орган промышленного робота, содержащий основание с установленной на нем кистью со схватами, привод синхронного поворота схватов и
привод перемещения рычагов схватов, о т- ли чающийся тем, что, с целью упрощения конструкции и расширения эксплуатационных возможностей, каждый из схватов выполнен в виде двух рычагов второго рода,
шарнирно связанных между собой и подпружиненных относительно друг друга, при этом один из рычагов каждого схвата жестко соединен с одним из двух дополнительно введенных кронштейнов, шарнирно установленных на кисти исполнительного органа и кинематически связанных со штоком привода поворота схватов, а другой рычаг каждого схвата кинематически связан с приводом перемещения рычагов схватов.
2. Исполнительный орган поп. 1, о т л и- ч а ю щ и и с я тем, что, с целью уменьшения габаритов схватов, привод поворота схватов смонтирован соосно с приводом перемещения рычагов схватов.
2 I Л
Т
Ч
18
ФигЛ
2018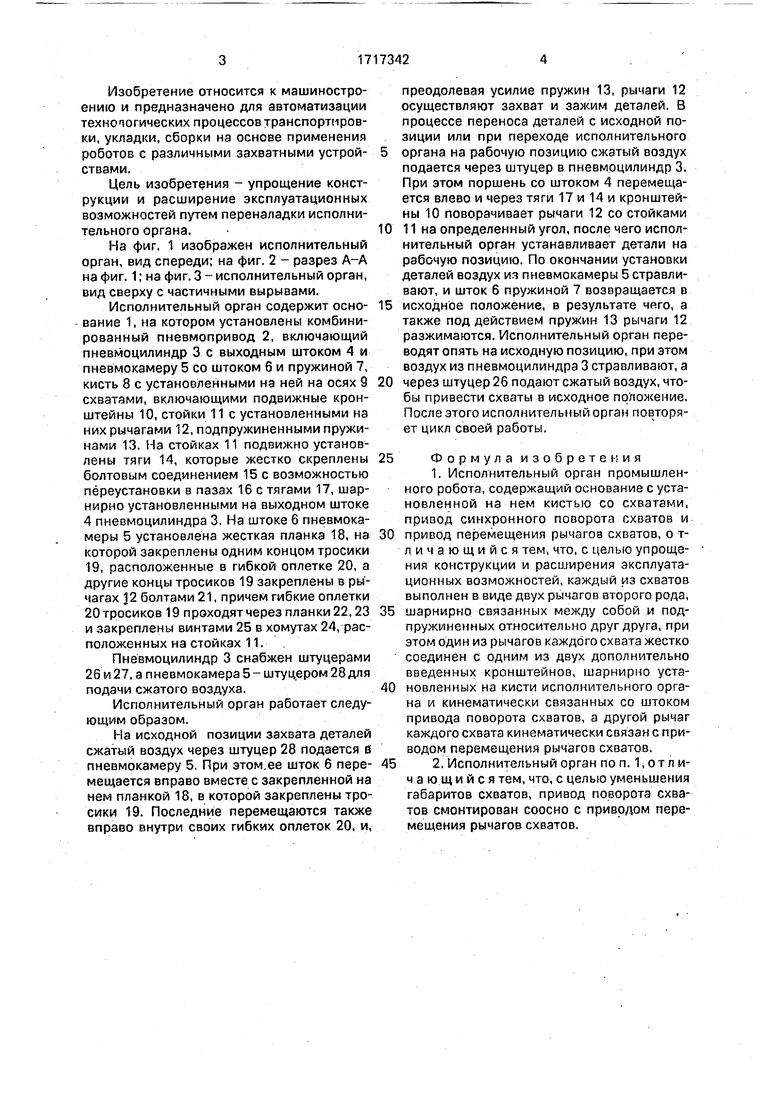
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Станок для монтажа золотника в стебель вентиля пневмокамеры и для наполнения воздухом последней | 1981 |
|
SU1002168A1 |
| Автоматический прибор для измерения твердости изделий в виде полых полусфер | 1967 |
|
SU1841226A1 |
| Устройство для обработки выводов радиоэлементов | 1988 |
|
SU1580604A1 |
| Устройство для отделения листа от стопы и подачи его в зону обработки | 1985 |
|
SU1338940A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Устройство для установки и развальцовки контактных штырей на печатных платах | 1989 |
|
SU1709574A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
Изобретение относится к области машиностроения и предназначено для автоматизации технологических процессов. Целью изобретения является упрощение конструкции и расширение эксплуатационных воз41 можностей путем переналадки исполнительного органа. Исполнительный орган содержит комбинированный пневмопривод 2 с двумя штоками 4 и 6. На кисте 8. жесткр установленной на корпусе пневмопривода 2, размещены кронштейны 10 с возможностью поворота относительно осей 9. Схваты 12 смонтированы на стойках 11 в кронштейнах 10, На стойках 11 шарнирно установлены тяги 14 и 17, кинематически связанные со штоком 4. На штоке 6 жестко установлена планка 18 с закрепленным в ней тросом 19, связанным с одним из рычагов каждого схвата. Поворот схватов 12 вокруг осей 9 осуществляется перемещением штока 4. Захват деталей схватами 12 осуществляется с помощью тросов 19 при перемещении штока 6. 1 з. п. ф-лы, 3 ил. /1Д/ L/-rfy.г со С Ч 00 Ь го 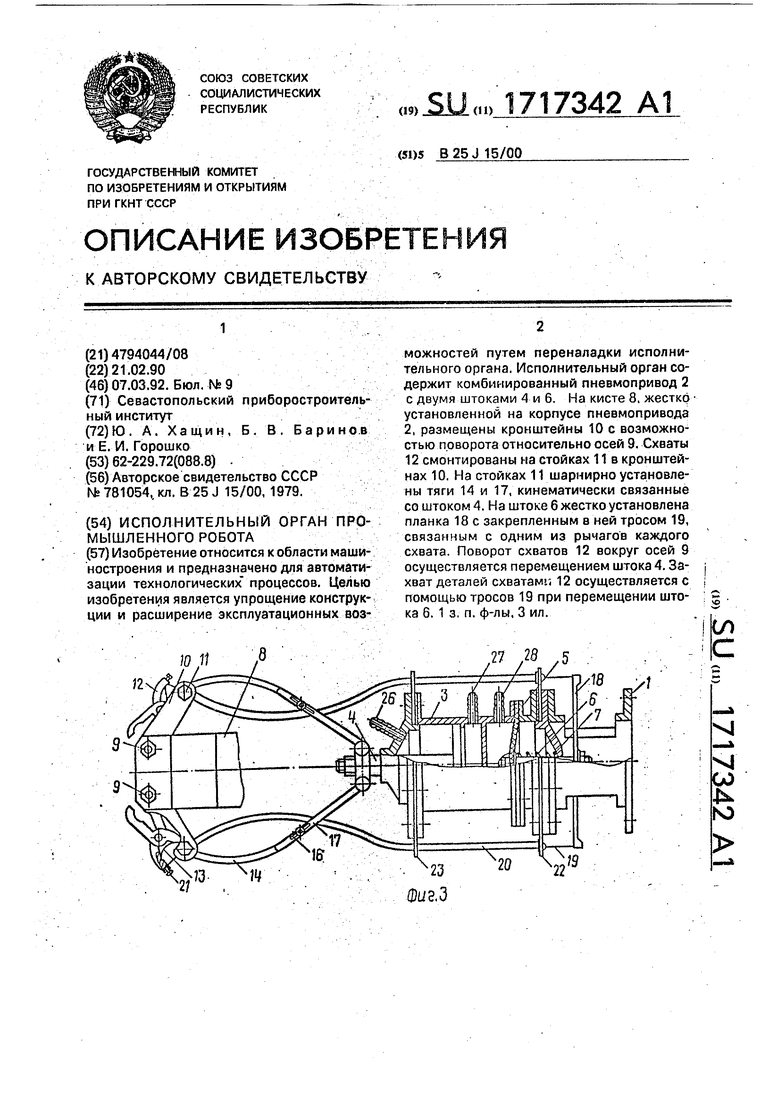
19
Риг.2
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
