(54) ПОДВЕСКА ПОДВЕСНОГО КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска подвесного конвейера | 1980 |
|
SU948792A1 |
| Подвеска грузонесущего конвейера | 1981 |
|
SU967888A1 |
| Подвесной конвейер | 1990 |
|
SU1722978A2 |
| Подвесной конвейер | 1977 |
|
SU763211A1 |
| Подвеска подвесного конвейера | 1979 |
|
SU859255A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1433875A1 |
| УСТАНОВКА ДЛЯ ХРАНЕНИЯ И ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ИЗДЕЛИЙ | 1968 |
|
SU212125A1 |
| Подвеска подвесного конвейера | 1983 |
|
SU1146245A1 |
| Подвесной грузонесущий конвейер | 1989 |
|
SU1654159A1 |
| Устройство для передачи груза с подвесного конвейера на рольганг | 1984 |
|
SU1217751A1 |
Изобретение относится к машинам непрерывного транспорта, а именно к подвескам подвесного конвейера для транспортировки штучных грузов. 5
Известна подвеска подвесного конвейера, включающая прикрепленный к тяговому органу кронштейн, несущий грузовые захваты, выполненные в ви де призм с удлиненными опорньми по- |0 верхностя 4и и связанные с ог| аничителем переме ценйя изделия Ij .
Недостатком известной подвески является узкая область применения.
Наиболее близким техническим ре- ц шением к предлагаемому является подieecxa подвесного конвейера, включающая прикрепленную к каретке стойку с грузонесущей полкой с роликом и кронштейном и механизмом перемещения 20 грузонесущей полки 2.
недостатком известной подвески является обязательная разгрузка грузонесущих полок.
Цель изобретения - обеспечение 25 выборочной .разгрузки груза.
Поставленная цель достигается тем, чтомеханизм перемещения грузонесущей полки выполнен из С -образного элемента с пазами и-собачкой и CH|i6- JQ
жен поворотным рычагом с прорезями на концах и штырём, причем штырь установлен в пазах С-образного злемента и прорези поворотного рычага, а собачка расположена с возможностью взаимодействия с роликом грузонесущей полки, стойка которой выполнена с возможностью фиксации ее положения.
При этом I грузонесущая полка установлена на стойке посредством шарнира, который расположен относительно полки эксцентрично, а сама полка подпружийена.
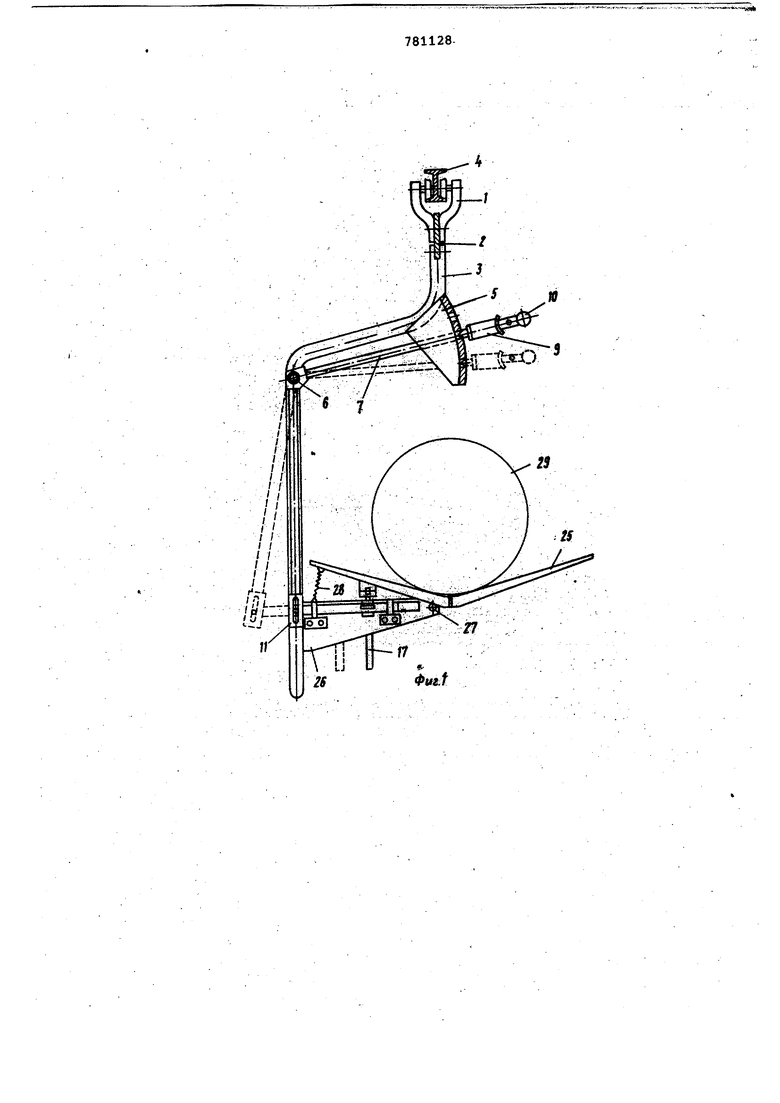
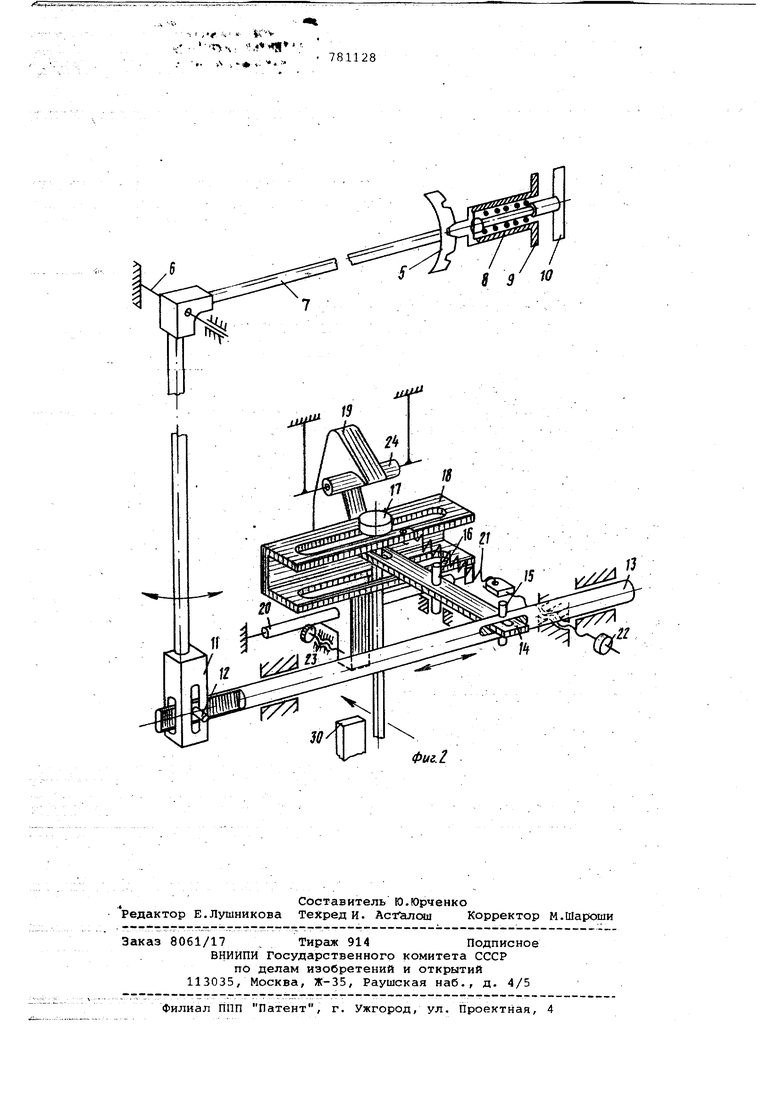
На фиг. 1 изображена подвеска, общий вид; на фиг. 2 - механизм перемещения грузонесущей полки подвески в аксонометрической проекции.
К ходовой каретке 1 тягового органа 2 прикреплена стойка 3. Каретка перемещается по грузовому пути 4. На стойке 3 неподвижно укреплен сектор управления 5, по дуге которого выполнены отверстия. Кроме зтого, на стойке 3 установлен неподвижно палец 6, представляющий собой ось качания рычага 7. С одного конца рычага 7 закреплен подпружиненный пружиной сжатия 8 фиксатор 9с рукояткой 10.
который имеет заостренный конец, входяпций в бтверсти:я на сект бреь правления 5, С другого конца рычага 7 закреплена бобышка 11 с прорезйми, в которых перемещается ось 12 и кронштейн 13..Кронштейн 13 имеет прорезь, в которой ходит конец рычага 14. Рычаг 14 имеет на концах прорези, в одной из которых перемещается фиксатор 15, неподвижно закрепленный в Кронштейне 13. Рычаг 14 имеет ось качания вокруг неподвижно установленного валика 16. С другой стороны рычага 14 в прорези установлен штырь 17, который может перемещаться по пазам -образного элемента 18, на котором нёпЬдвижно закреплена собачка 19, образуя систему, качающуюся вокруг вала 20. При качании эта подпружинена пружиной растяжения 21 с регулировочным винтом 22, псээволяюЖйМрегулировать величину натяжения ifpyjKHHEj.
Kipoivie того, система снабжена регулируемым упором 23. Конец собачки 19 взаймодёйств ёт с врйщайщ имся роликом 24, ось Которого неподвижно закреплена на грузонесущей полке 25. CaiMa полка закреплена на кЬнсолй 26, Ь-возможностью качания вокруг рей 27 Полка 25 снабжена возвратными пружинами 28. Ось, 27 установлена эксцентрично по отношению к полке 25 для облегчения разгрузки груза 29. подвеска взаимодействует с неподвижным упором 30, установленнйм на приёмном столе.
Подвеска работает следуквдим .
При помсяци сектора управления 5 и фиксатора 9 устанавливается определенная программа разгрузки полки 25. При движении поЯки 25 штырь 17 натыкается на неподвижный упор 30 приеьшого стола. При этом система корпус 18-собачка 19 поворачивается, преодблевая сопротивление пружийу растяжения 21 вокруг вала 20. Конец собачки выходит из контакта с вращающимся роликом 24, ось которого неподвижно закреплена на полке25. При этом полка 25 освобождается от фиксации и род действием массы груза 29 и эксцентриситета поворачивается. Груз 29 падает на приемный стол, а полка под действием возвраГтйЁйс п ружин 2В возвращается в исходное полос ние.При этом ролик 24 ударяет по поверхности конца собачки 18, отодвигает ее назад и входит в зацепление с последней,. а полка 25 фиксируется в ийходнрм положенйй. При изменений прогрг1МУ ы разгрузки рабочий на ходу конвейера берется за
781128
ручку 10, преодолевая сопротивление пружины сжатия 8, отодвигает назад фиксатор 9 и перемещает его до нужного отверстия на секторе управления 5. После этого он отпускает фиксатор, который занимает rtoBoe положение, входя своим заостренным концом в отверстие. При этом рычаг поворачивается вокруг пальца 6 и перемещает за собой кронштейн 13, который перемещаясь, заставляет.поворачиваться
рычаг 14 вокруг Ъалика 16. Поворачива йсь, рШаг перемещает по пазу корт пуса 18 штырь 17, который занимает новое положение, перемещаясь попе- рек направления грузонесущей полки
йад выступо 1 30, не взаимодействуя с ним. Груз при этом не разгружается И полка проходит дальше к следующему
приемному столу, где выступ 30 расположен таким образом, что входит в контакт со штырем 17.
Изменение программы выгрузки происходит на ходу без остановки Конвейера, что значительно повышает его производительность.
Формула изобретения
взаимодействия с роликом грузонесущей полки, стойка Которой выполненас возможностью фиксации ее положения.
Источники информации, . принятые вО Внимание при экспертизе
tt
« К-
ПЧ: .
781128
-Л -. Л -
