(54) МАНИПУЛЯТОР 
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU785026A1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Устройство для обвязки кольцеобразных изделий проволокой | 1980 |
|
SU876500A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство для контроля и сортировки радиодеталей по электрическим параметрам | 1990 |
|
SU1706073A1 |
| ТОКАРНАЯ СИЛОВАЯ ГОЛОВКАт~—^~"I | 1972 |
|
SU346033A1 |
| Загрузочное устройство | 1988 |
|
SU1664508A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ФАСОК НА ДИСКАХ | 1973 |
|
SU364416A1 |
| Устройство для передвижения по вертикальным опорам Л.Н.Бульмана | 1991 |
|
SU1796217A1 |
1
Изобретение относится к машиностроению, а именно к конструкциям промышленных манипуляторов и роботов, и может быть использовано при оснаш,ении технологического оборудования средствами автоматической загрузки, выгрузки, ориентации.
Известен манипулятор, содержащий кор- пус, привод в виде силового цилиндра, кинематически связанный с захватом, выполненным в виде рычагов, шарнирно закрепленных в держателе с возможностью их поворота относительно вертикальной оси, ме- д ханизм ориентации, имеюший шестерню, установленную на корпусе с возможностью одновременного враш.ения с держателем, и тактильный датчик, жестко связанный с корпусом 1.
Недостатком известного манипулятора s является сложность конструкции и ненадежность.
Цель изобретения - упрошение конструкции манипулятора и повышение его надежности.
Цель достигается тем, что манипулятор, 20 снабжен фрикционной муфтой, выполненной в виде двух полумуфт с коническими поверхностями, причем одна из полумуфт
связана с шестерней, а другая - с корпусом.
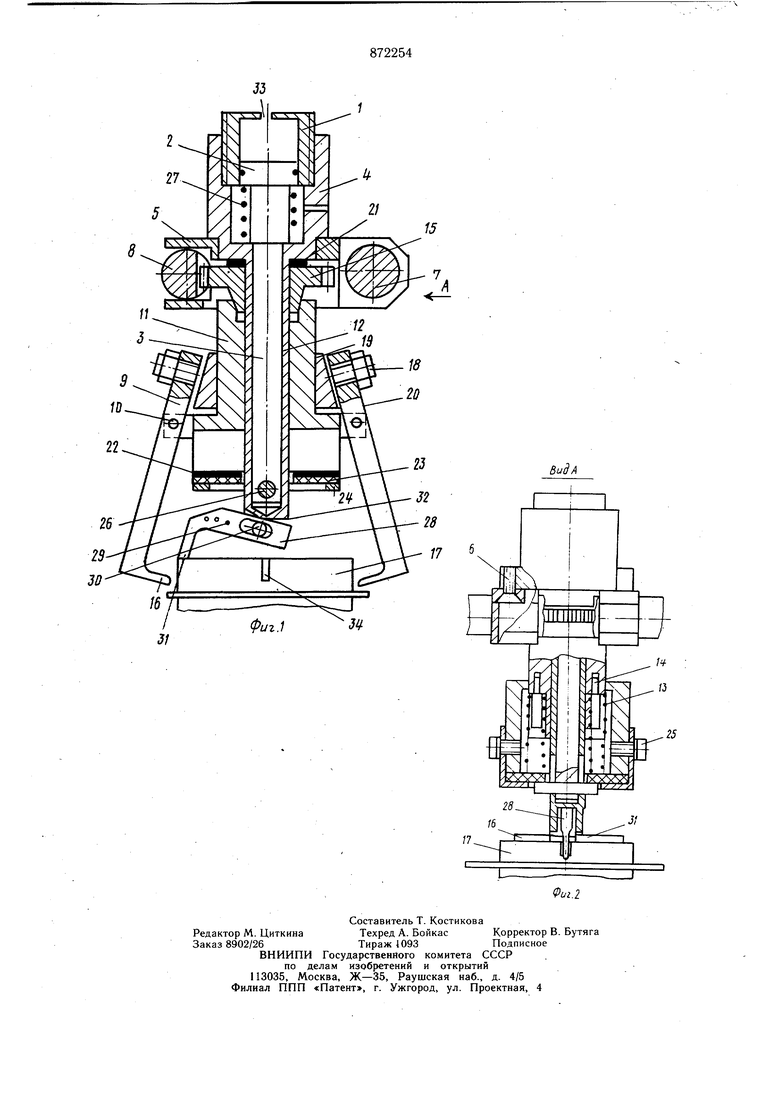
На фиг. 1 изображен манипулятор, разрез; на фиг. 2 - вид А на фиг. 1.
Манипулятор состоит из привода в виде силового цилиндра, захвата и механизма ориентации. Силовой цилиндр I, имеющий поршень 2, жестко связанный со штоком 3, установлен в корпусе 4, который жестко связан с ползуном 5 с помошью винтов 6. Ползун 5 перемещается по направляюшей 7 и рейке 8. Захват выполнен в виде рычагов 9, шарнирно закрепленных посредством оси 10 в корпусе 11, свободно установленном на оси 12. Корпус 11 пружинами 13, сцентрированными штифтами 14, поджимается вверх, чем и обеспечивается контакт между конической поверхностью корпуса 11 и шестерни 15 механизма ориентации. Рьмаги 9 на концах имеют захватные призмы 16, контактирующие с изделием 17. Постоянный контакт между витками 18 и конусом 19 обеспечивается пружинами 20, надетыми на ось 10. Рычаги 9 на противоположных концах имеют упорные винты 18, контактирующие с конусом 19. Шестерня 15 механизма ориентации свободно установлена на оси 12 и контактирует с корпусом 4 через шайбу 21, к которой она прижата пружинами 13 через корпус 11. Фрикционная муфта выполнена в виде двух полумуфт с коническими поверхностями, одна из которых связана с шестерней 15, а другая - с корпусом 11. Шестерня 15 своими зубьями находится в постоянном зацеплении с зубьями рейки 8, закрепленной, как и направляющая 7, неподвижно относительно шестерни 15. Конус 19 с двух сторон охватывает корпус 11 и замыкается снизу планкой 22, прокладкой 23 и скобой 24, прикрепленной винтами 25 к конусу 19. В штоке 3 неподвижно установлен, штифт 26 который постоянно контактирует с прокладкой 23 из-за наличия пружины 27. В оси 12 закреплен тактильный датчик 28, который за счет наличия пружины 29, надетой на ось 30, контактирует фиксирующим концом 31 с верхним торцом изделия 17 или прижимается противоположным концом (в случае отсутствия изделия) к поверхности 32 оси 12. Датчик 28 на оси 30 может качаться фиксирующим концом 31 вверх и вниз в заданных пределах и может быть установлен в горизонтальном положении с помощью пружины 29. В корпусе 4 также установлена пружина сжатия 27, одним концом связанная с поршнем 2, а другим - с корпусом 4.
Манипулятор работает следующим образом.
Через канал 33 подается сжатый воздух, и поршень 2 со штоком 3 перемещается вниз в положение, показанное на фиг. 1. При этом пружина 27 сжимается. Конус 19 пружинами 13 перемещается вниз, нижние концы рычагов 9 разводятся.
Затем манипулятор опускается (привод вертикального перемещения не показан) до заданного положения. По мере его опускания датчик 28 соприкасается с верхним торцом изделия 17 и, перемещаясь вверх фиксирующим концом 31 за счет вращения на оси 30, сжимает пружину 29. После остановки манипулятора в нижнем положении канал 3 сообщается с атмосферой, и пружина 27 перемещает вверх поршень 2, шток 3, щтифт 26 и конус 19. Рычаги 9 при этом поворачиваются на осях 10 за счет наличия пружин 20, обеспечивак щих постоянный контакт упорных винтов 18 с конусом 19, а призмы 16 зажимают изделие 17.
Манипулятор поднимается и в верхнем положении перемещается горизонтально относительно неподвижной рейки 8 и направляющей 7 на позицию выгрузки (привод горизонтального перемещения не показан). При этом шестерня 15, обкатываясь по рейке 8, вра.щается на оси 10 и за счет
наличия фрикционной муфты передает вращение через корпус 11, конус 19, рычаги 9 изделию 17. Таким образом, изделие получает вращательное движение относительно неподвижного датчика 28.
Прокладка 23 выполнена из материала с низким коэффициентом трения, что способствует легкости вращения корпуса на оси 12 относительно неподвижного штифта 26.
В момент совмещения паза 34 с фиксирующим концом 31 датчика 28, последний под действием пружины 29 перемещается вниз и заходит в паз 34. После этого изделие 17 совместно с датчиком соприкосновения 28, рычагами 9, конусом 19
и корпусом 11 перемещается на позицию выгрузки без вращения, так как муфта обеспечивает проскальзывание неподвижного корпуса М относительно вращающейся щестерни 15.
На позиции выгрузки манипулятор опускается, в канал 33 подается сжатый воздух, и изделие 17 освобождается от призмы 16. Так, с разведенными призмами 16, манипулятор поднимается и возвращается на исходную позицию загрузки.
В случае наличия на торце изделия 17
выступа манипулятор также обеспечивает ориентацию изделия по выступу за счет соприкосновения выступа с датчиком соприкосновения 28.
Данная конструкция повыщает надежность и увеличивает срок службы манипулятора.
Формула изобретения
Манипулятор, содержащий корпус, привод в виде силового цилиндра, кинематически связанный с захватом, выполненным в виде рычагов, щарнирно закрепленных в держателе с возможностью их поворота относительно вертикальной оси, механизм
ориентации, имеющий шестерню, установленную на корпусе с возможностью одновременного вращения с держателем, и тактильный датчик, жестко связанный с корпусом, отличающийсяткы, что, с целью упрощения конструкции манипулятора и повыщения его надежности, он снабжен фрикционной муфтой, выполненной в виде двух полумуфт с коническими поверхностями, причем одна из полумуфт связана с шестерней, а другая - с корпусом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2715093/25-08, кл. В 23 Q 7/04, 1979.
