(54) КОНСОЛЬНЫЙ КРАН

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство захвата и передачи изделий между конвейерами | 1978 |
|
SU776973A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Грейферное подающее устройство к прессу | 1987 |
|
SU1433594A1 |
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| Автоматический захват для изделий с вертикальными отверстиями | 1984 |
|
SU1234342A2 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
Изобретение относится к подъемно транспортным машинам производственного назначения и может быть использовано для подъема и перемещения грузов или изделий по заданной траектории с ориентированным в пространстве положением переносимого груза, а также для выполнения работ по обработке поверхностей изделий при замене грузозахватывающих устройств рабочим органом, например обрабатывающим инструментом.
Известен консольный кран, содержащий станину портального типа с установленной на ней поворотной осью, жестко соединенной с консольной рамой, на которой установлена с возможностью перемещения вдоль последней, подпружиненная каретка, задающее устройство, содержащее взаимодействующие между собой копир и контактные ролики, траверсу, оснащенную захватными органами, и механизм поворота консольной рамы 1.
Недостатком известного устройства являются его ограниченные возможности по обеспечению автоматического перемещения захватных органов по заданной траектории.
Цель изобретения - расширение эксплуатационных возможностей устройства по обеспечению автоматического перемещения захватньох органов.
Указанная цель достигается тем, что кран снабжен втулкой, в которой размещен ползун, и гидроцилиндром, соединенными между собой и с поворотной осью с помощью рычагов, при
10 этом ползун и шток гидроцилиндра соединены с траверсой, а поворотная ось снабжена жестко закрепленными к ней рычагами, на которых установлены упомянутые контактные ролики, 15 причем копир выполнен в виде закрепленных на станине профилированных направляющих линеек. .
Кроме того, кран снабжен набором сменных линеек.
20
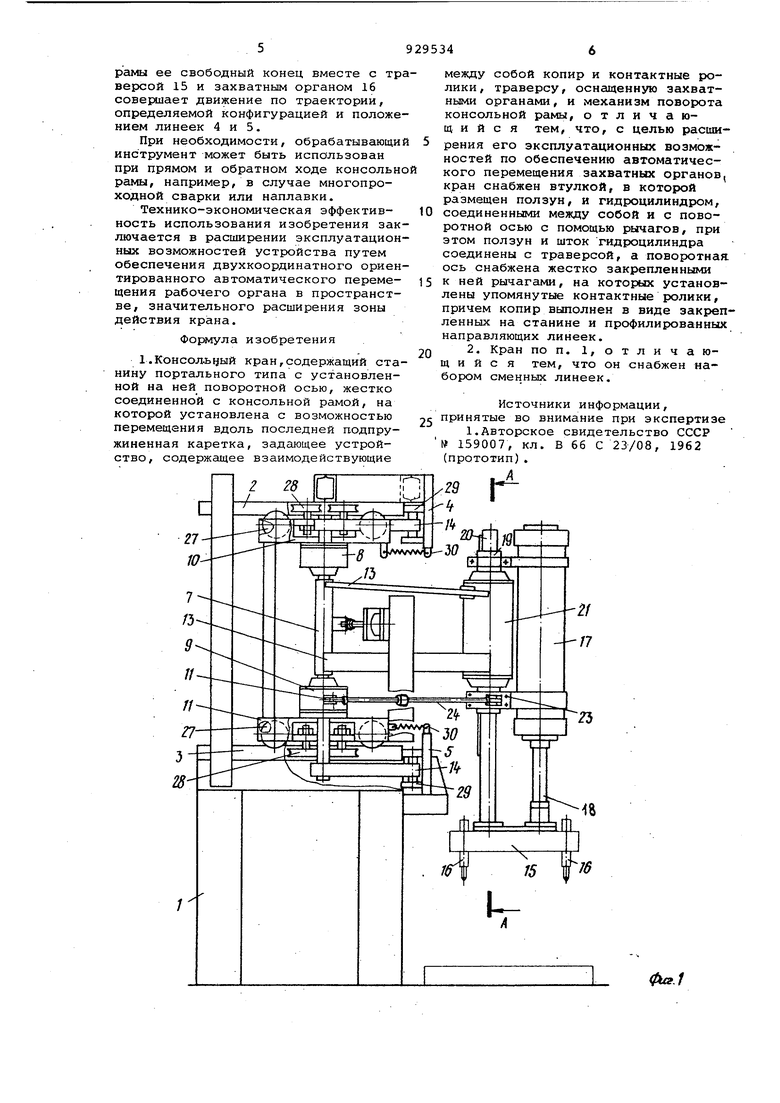
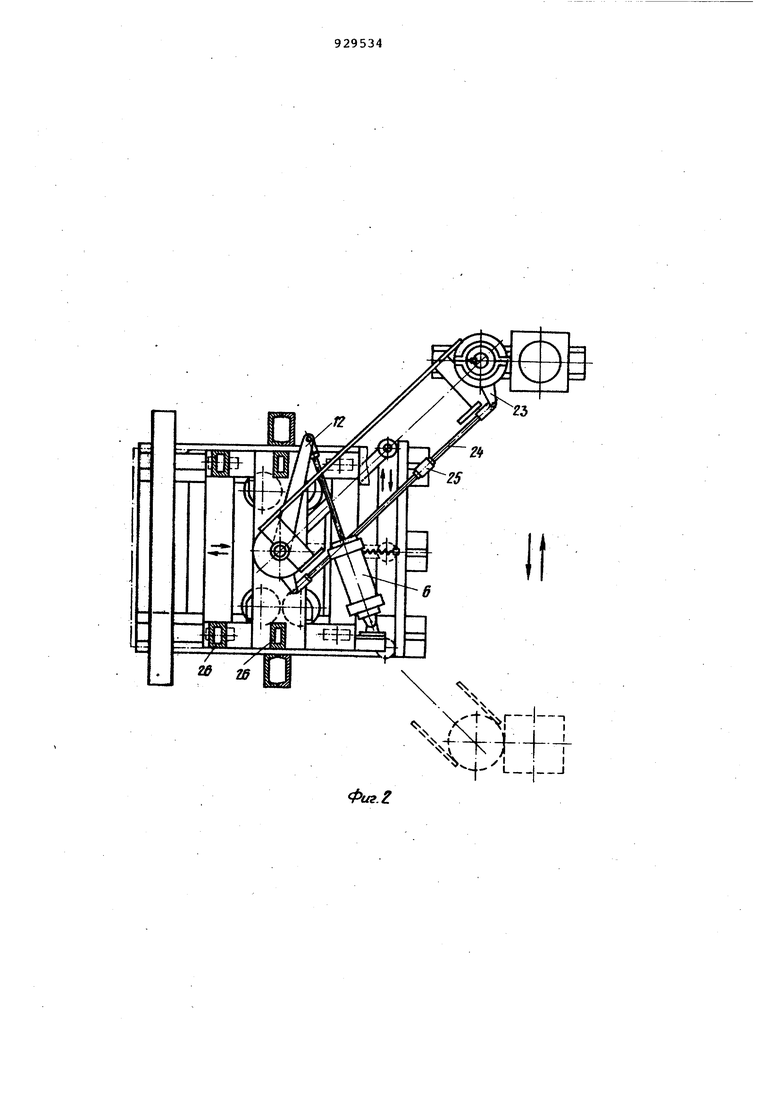
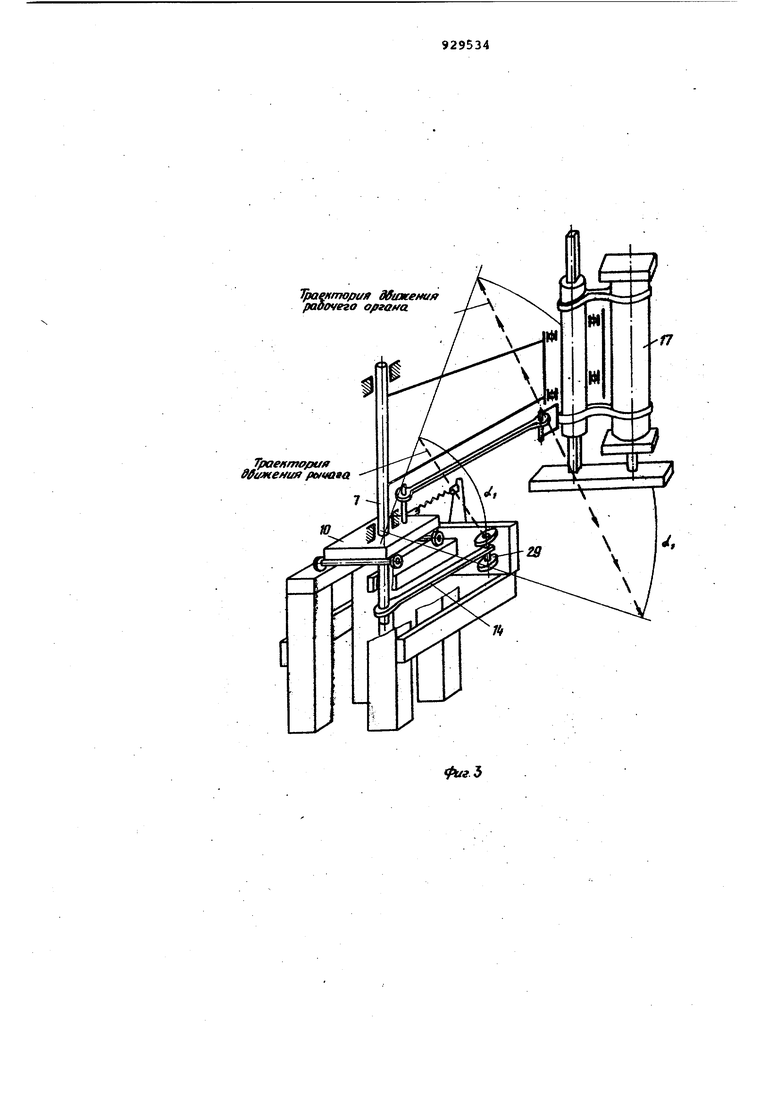
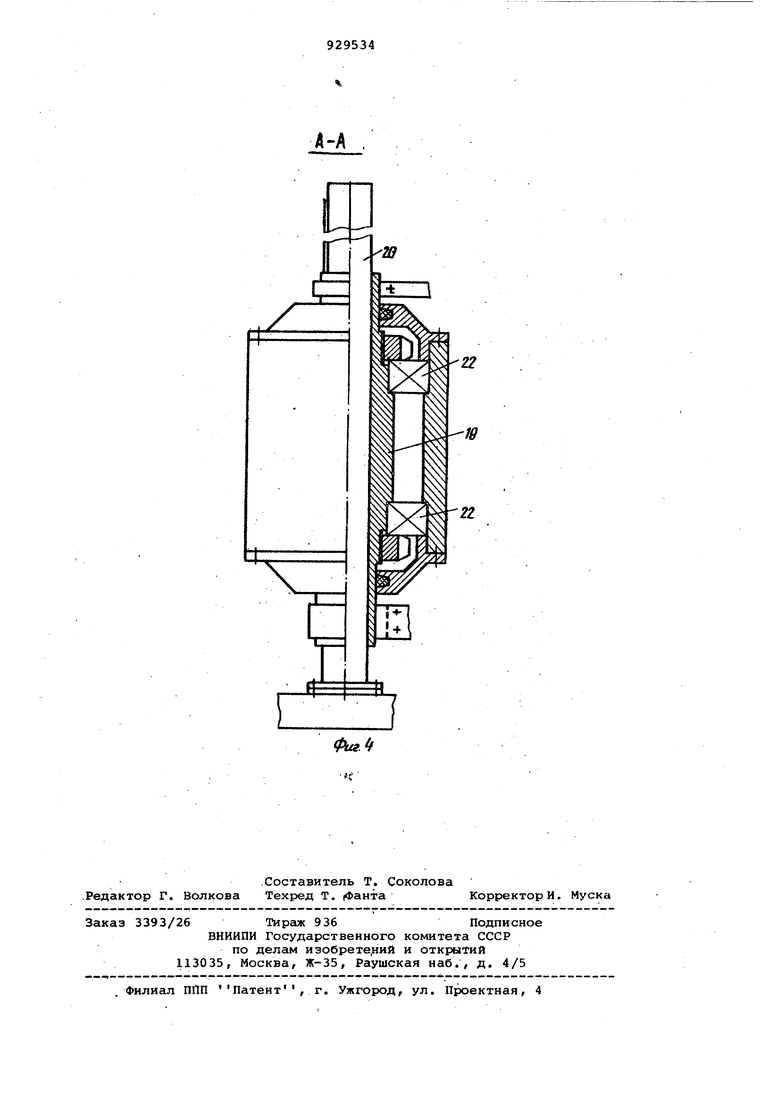
На фиг.1 схематично изображен кран, общий вид; на фиг.2 - кран, вид в плане; на фиг.З - принципиальная схема крана; на фиг.4 - разрез А-А на фиг.1.25
Консольный кран содержит станину портального типа 1 с верхней 2 и нижней 3 направляющими, выполненными, в виде труб и замкнутыми рамными конструкциями с закрепленными на них 30 верхней 4 и нижней 5 профилированHidMH линейками, механизм поворота консольной рамы, включающий гидроцилиндр 6, поворотную ось 7,. установленную в подшипниковых опорах 8 и 9 верхней 10 и нижней И кареток. На оси жестко закреплен рычаг поворота 12, соединенный со штоком гидроцилиндра б, консольную раму 13 и закрепленные на продолжении концов оси 7 рычаги 14, жестко закрепленный на подшипниковой опоре 9 кронштейн с осью. Механизм подъема и опускания траверсы 15 с захватными органами (исполнительными инструмен-тами) 16 вклю чает пневмоцилиндр 17, шток 18 которого нижним концом жестко закреплен в теле траверсы, а корпус пневмоцилиндра прикреплен к корпусу 21 поворотной втулки 19, в которой размещен ползун 20 с .продольным шлицевым выступом, нижним концом жестко закрепленный в теле траверсы 15. Механизм ориентирования рабочего органа в пространстве содержит корпус 21, жестко закрепленный на внешнем конце консольной рамы 13. Внутр корпуса установлены подшипниковые опоры 22 и поворотная втулка 19,вхо дящая своим шлицевым пазом на шлице вой выступ ползуна 20. Поворотный рычаг 23 жестко закреплен на втулке 19. Регулировочная тяга 24 состоит из двух половин, соединенных между собой муфтой 25. Указанная тяга одним концом шарнирно соединена . с поворотным рычагом 23, а вторым концо имеющим клеммный зажим, с осью крон тейна под1иипниковой опоры 9. Механизм преобразования дугсЬобра ного движения консольной рамы в пря молинейное включает верхнюю 10 и нижнюю 11 каретки, замкнутые балкам 26 в одну тележку. Опорные 27 и направляющие 28 ролики кареток установлены на направляющих 2 и 3 станины, копирующие рялчаги 14 одним концом закреплены на оси 7, а другим концом, несущим шарнирно закрепленные контактные ролики 29, постоянно прижаты к направляющим линейкам 4 и 5. Возвратные пружины 30 закреплены между каретками и соответствующими направляющим линейками для постоянного поджатия контактных рюликов к направляющим линейкам и для обеспечения возвратно-поступательного перемещения кареток в процессе работы. Работа крана в зависимости от установленного рабочего органа може происходить или в режиме перемещения груза по заданной траектории с ориентированием его положения в про странстве или в режиме обработки изделий. При перемещении груза работа осу ществляется следующим образом. Оператор нажатием кнопки включаеа реле воздухораспределителя. Сжатый воздух поступает в верхнюю полость пневмоцилиндра 17, шток 18, перемещаясь, опускает вниз траверсу 15 с захватными органами до соприкосновения последних с плоскостью изделия. В этот момент изделие захватывается и подается команда на подъем траверсы с закрепленным к нейгрузом. С подъемом на нужную высоту подается команда на поворот консольной рамы 13 с траверсой и грузом. При этом гидроцилиндр поворота 6 через рычаг поворота 12 поворачивает ось 7, которая поворачивает закрепленную на ней консольную раму. При повороте консольнойрамы ее свободный конец должен был описывать дугу, но в силу того, что поворотный механизм установлен на тележке, а тележка с помощью пружин 30 поджата до упора контактных роликов 29 копировальных рычагов 14 в плоскость направляющих линеек 4 и 5, тележка совершает возвратно-поступательное движение в горизонтальной плоскости перпендикулярно к плоскостям на11равляющих линеек 4 и 5, а свободный конец консольной рамы вместе с грузом совершает движение по траектории определяемой конфигурацией направляющих линеек 4 и 5. Устройство снабжено набором сменных профилированных линеек. В период исходной установки положения траверсы в пространстве работает механизм ориентирования траверсы. Для этого ослабляют клеммный захват тяги 24 и, изменяя длину тяги с помощью сгонной муфты 25, поворачивают рычаг 23 и, с его помощью, поворотную втулку 19, которая через шлицевое соединение проворачивают ползун 20, а в си71у того, что ползун 20 закреплен жестко в траверсе, последняя проворачивается на нужный угол до образования параллелограмма, сторонами которого служат консольная рама 13, регулировочная тяга 24, рычаг 23 и кронштейн подшипниковой опоры 9. После установки траверсы с заданной ориентировкой фиксируют положение сгонной муфты 25 и затягивают клеммный зажим регулировочной тяги 24. При обработке изделий работа машин заключается в следующем. Устанавливают на траверсе держатели исполнительного инструмента (сварочного устройства, резца, фрезы, краскопульта, шлифовального или полировочного круга и т.п.). Устанавливают в нужное положение направляющие линейки 4 и 5, выводят инструмент в исходное положение и включают механизм поворота консольной рамы. В результате поворота консольной рамы ее свободный конец вместе с тр версой 15 и захватным органом 16 совершает движение по траектории, определяемой конфигурацией и положе нием линеек 4 и 5. При необходимости, обрабатывающи инструмент может быть использован при прямом и обратном ходе консольн рамы, например, в случае многопроходной сварки или наплавки. Технико-экономическая эффективность использования изобретения зак лючается в расширении эксплуатацион ных возможностей устройства путем обеспечения двухкоординатного ориен тированного автоматического перемещения рабочего органа в пространстве, значительного расширения зоны действия крана. Формула изобретения 1 .Консол-ьцый кран,содержащий ста нину портального типа с установленной на ней поворотной осью, жестко соединенной с консольной рамой, на которой установлена с возможностью перемещения вдоль последней подпружиненная каретка, задающее устройство, содержащее взаимодействующие между собой копир и контактные ролики, траверсу, оснащенную захватными органами, и механизм поворота консольной рамы, о т л и ч а ющ и и с я тем, что, с целью расширения его эксплуатационных возможностей по обеспечению автоматического перемещения захватных органов, кран снабжен втулкой, в которой размещен ползун, и гидроцилиндрюм, соединенными между собой и с поворотной осью с помощью рычагов, при этом ползун и шток гидроцилиндра соединены с траверсой, а поворотная. ось снабжена жестко закрепленными к ней рычагами, на которых установлены упомянутые контактные ролики, причем копир выполнен в виде закрепленных на станине и профилированных направляющих линеек. 2. Кран по п. 1, отличающий с я тем, что он снабжен набором сменных линеек. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 159007, кл. В 66 С 23/08, 1962 (прототип).
Травнтория д ажемая рабочего ofxatfa
Траеитория д амемий рынава
-22
-Ю
гг
