1
Изобретение относится к средствам управления и может быть использовано для управления многоприводными подъемно-транспортными установками, например, конвейерами с гибким тяговым 5 органом.:
Известно устройстводля управления конвейером с измерением скорости движения конвейерной ленты с использова- нием магнитопроводящих меток, включа-Ю ющее магнитопроврдящие метки в ленте и магнитопровод, связанный с индук- . ционным датчиком, расположенным под лентой l.
Недостатком устройства является t5 низкая точность контроля скорости, а следовательно и тяговых усилий, передаваемых приводными барабанами ленте этим устройством, низкая из-за малой частоты следования магнитопроводящих 20 меток и отсутствия учета общей вытяжки ленты при изменениях .нагрузки. Кроме того, износ краев ленты, происходящий при эксплуатации, и исчезновение из-за этого меток, снижает на- 25 дежность работы устройства.
Известно также устройствЬ для управления двухприводной конвейерной установкой, содержащее блоки управления приводными двигателями с дат- 30
чиками тягоцых усилий, два функциональных преобразователя, три блока суммирования, датчики потерь динамических усилий, блок деления и блок сравнения 2.
Известное устрюйство имеет сравнительно низкую точность регулирования тяговых моментов, а,.следовательно и тяговых усилий приводных барабанов, т. к. не учитывает вытяжку тягового органа при изменении нагрузки на него, а значит и не обеспечивает достаточную надежность управления конвейерной установкой.
Целью предлагаемого изобретения является повышение точности и надежности управления многоприводной подъемно-транспортной установкой с гибким тяговым органом за счет распределения тяговых усилий между приводны- ми барабанами в зависимости от изменения нагрузки на тяговом органе.
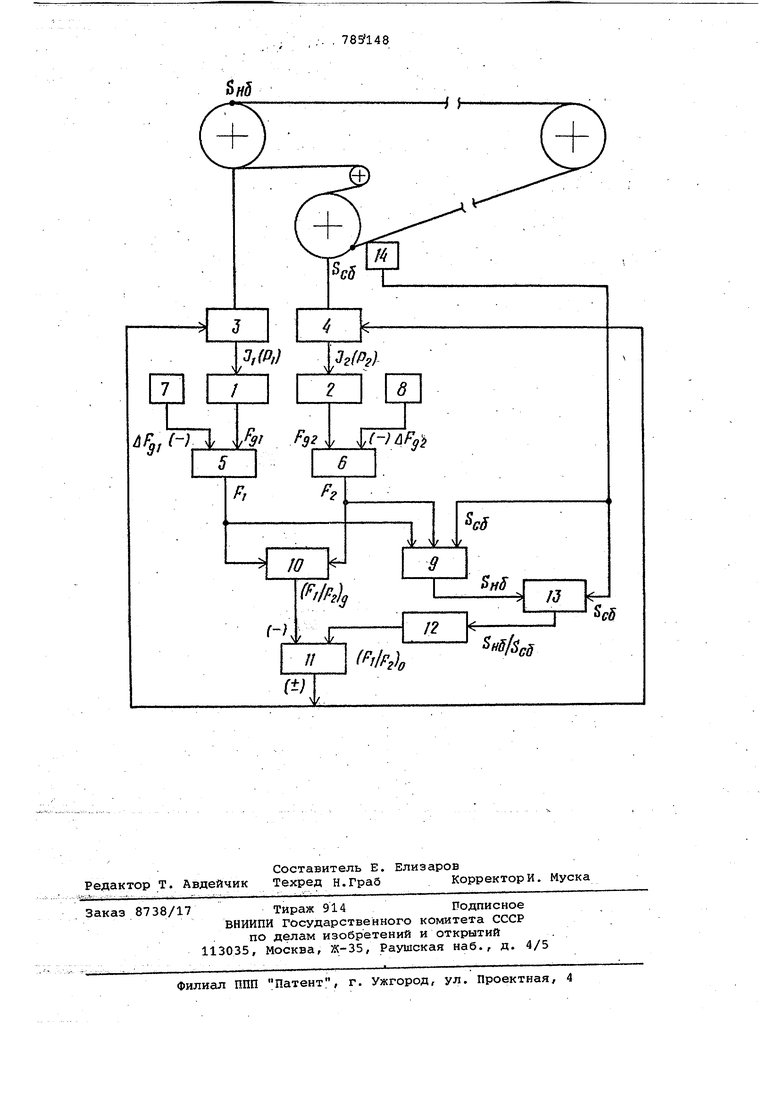
Указанная цель достигается тем, что устройство снабжено дополнительным датчиком тягового усилия в сбега.ющей ветви тягового органа, вторым блоком деления и третьим функциональным преобразователем, выход которого соединен с одним из входов блока cjpaBнения, а вход - с выходом второго блока деления, один из входов которого соединен с выходом третьего блока су мирования, а второй - с датчиком тягового усилия в сбегающей ветви тяго вого органа и одним из входов третье го блока суммирования. Такое выполнение устройства позво ляет определять действительное отно.шение тяговых усилий приводных бара.банов, сравнивать его с оптимальным для данной нагрузки на тяговый орган отношением тяговых усилий и с помо-, . щью, этого сигнала более точно коррек тировать распределение тяговыгг усили между приводными барабанами. Этим - исключается возможность пробуксовки барабанов, обратный ход тягового органа с грузом и связанные с этим аварийные йитуа ций,а следова тёлъно, повышается надежность управ лёнйя подъемно-транспортной установкой . На чертеже, представл ена функциональная схема устройства для управления подъемно-транспортной установкой с гибким тяговым органом. Устройство содержит: функциональные преобразователи 1, 2, входы которых соединены с выходами блоков уп-, равления приводными двигателями 3, 4 с датчиками тяговых усилий, а выходы - е первыми входами блоков суммирования 5, 6, ко вторым входам ко тбрйГгсйЮдсоединёнй датчики потерь ди намических усилий 7, 8. Выходы блоков суммирования 5, б соединены,с входами блока суммирования 9 и с вхо дами блока деления 10, который своим выходом соединен с первым входом бло ка сравнения 11, второй вход которого соединен через функциональный преобразователь 12 с выходом блокЗ деления 13, вхоДы которого соединены с выходом блока суммирования 9 и с вйходом датчика тягового усилия 14 в сбегающей ветви тягового органа, ВЫХОД которого соединен также и с третьим входом блока суммирования 9. Устройство работает следующим образом. . Сигналы, снимаемые с датчиков тяговых усилий приводных двигателей, постоянного тока, и переменного (если ™ ёстё зйейо постоянного тока в силово цепи, либо датчик активной мощности в приводе переменного тока) riponojpцибна льйые значениям тяговых усилий, pasBHBaeNMX прийодными двигателями, подаются на функциональные преобразо 1, 2, на выходе которых полу чаем сигналы, соответствующие Вёлй и HaW дйнамических тяготвых усилий п йводных двигателей F(j4 , .2., которые поступают в блоки суммирования 5, 6 где алгебрайчёсКи суммируются с дина мкч&ёктШ тйтовШщг Ш1ШЖГ гЩ й мЦ ми на муфтах/ в РёдУктоЕ ах, на: привб ных барабанах , величины ,которых йзме с помощью датчиков потерь тяговых усилий 7, 8, На выходах блоков суммирования 5, б выдаются сигналы, пропорциональные тяговым .усилиям р , Fj приводных барабанов, которые поступают в суммирующий блок 9 и в делительный блок 10, сигнал на выходе которого пропорционален действительному отношению тяговых усилий приводных барабанов (FilFj) -g. Сигнал, снимаемый с выхода датчика усилия 14 пропорциональный тяговому усилию в сбегающей ветви S(;f тягового органа, поступает в делительный блок 13 и в суммирующий блок 9, где алгебраически суммируются с значениями тяговых усилий приводных барабанов и с выхода блока 9 выдаётся сигнал, пропорциональный величине тягового усилия, возникающего в набегающей ветви тягового органа S J,J . Этот сигнал поступает -в делительный блок 13, на выходе которого образуется сигнал, пропорциональный оптимальному отношению тяговых усилий в набегающей и сбегающей ветвях Sjjj-XS j который поступает в функциональный преобразователь 12, на выходе которого образуется сигнал, пропорциональный оптимальному для данной нагрузки на тяговый орган, отношению тяговых усилий приводных барабанов () . g. Сигналы, снимаемые с выходов блоков 10 и 12 сравниваются по величине в блоке сравнения 11, на выходе которого появляется сигнал, пропорциональный отклонению действительного отношения тяговых усилий приводных барабанов от их оптимального отношения, он является сигналом коррекции и подается в системы управления приводныйи Двигателями 3, 4 с тем или иным знаком, вызывая перераспределение тяговых усилий между приводными бараг банамй всоответствии с нагрузкой на тяговый орган. Если сигнал на выходе блока сравнения 11 равен нулю, то тяtoebie усйлия между приводными барабанами распределены в соответствии с нагрузкой на тяговый орган и подъемно-транспортная убтановка работает в оптимальном режиме. Устройство для управления многоприводной подъемно-транспортной установкой с гибким тяговым органом позВОляёт за счет распределения тяговых усилий между приводными барабанами,в зависимости От измёнен.йя. нагрузки на тяговом органе, повысить точность и надежность управления. При этом обеспечивается максимальное использование тяговых возможностей приводных барабанов, снижается вероятность пробуксовки и истирания футеровки приводных барабанов и дорогостоящего тягового органа, увеличиваются межремОйтные Сроки, а следовательно снижаются и расходы на ремонтно-восстановительные работы. Кроме того, рациональное распреде ление тяговых усилий между приводными барабанами обеспечивает равномерну (пропорциональную мощности) нагрузку приводных двигателей, в результате него исключается их перегрузка, повышается срок службы и энергетически показатели (коэффициенты мощности и полезного действия). Сокращение простоев установки, связанных с выходом из строя привод 1ых двигателей, футеровки приводных барабанов и тягового органа, позволя ет повысить производительность и эффективность работы подъемно-транспор ной установки. Формула изобретения Устройство для управления многоприводной подъемно-транспортной установкой с гибким тяговым органом, содержащее блоки управления приводны ми двигателями с датчиками тяговых усилий, два функциональных йреобразо вателя, три блока суммирования, датчики потерь динамических усилий, бло деления и блок сравнения, отличающееся тем, что, с целью повышения точности и надежности управления, оно снабжено дополнительным датчиком тягового усилия в сбегающей ветви тягового органа, вторым блоком деления и третьим функциональным преобразователем, выход которого соединен с одним из входов блока сравнения, а вход - с выходом второго блока деления, один из входов которого соединен с выходом третьего блока суммирования, а второй - с датчиком тягового усилия в сбегающей ветви тягового органа и одним из входов третьего блока суммирования. Источники информации, принятые so внимание при экспертизе 1.Авторское свидетельство СССР № 488764, кл. В 65 G 43/00, 16.01.76. 2.Назаренко В. М,и др. К вопросу построения оптимальных систем управления двухбарабанными конвейерами с общим гибким тяговым органом Горный журнал, известия, ВУЗОВ, 4, 1974, с. 158-160.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления много-пРиВОдНОй пОд'ЕМНО-ТРАНСпОРТНОйуСТАНОВКОй C гибКиМ ТягОВыМ ОРгА-HOM | 1979 |
|
SU800052A1 |
| Способ управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1981 |
|
SU1089014A1 |
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |
| Устройство для управления многобарабанной, подъемно-транспортной установкой | 1977 |
|
SU899426A1 |
| Устройство для управления подъемнотранспортной установкой с гибким тяговым органом | 1975 |
|
SU602430A1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Промежуточный привод ленточного конвейера | 1990 |
|
SU1761641A2 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| Устройство для управления многоприводной подъемно-транспортной установкой | 1978 |
|
SU781144A1 |
| Многобарабанный конвейер | 1984 |
|
SU1207927A1 |