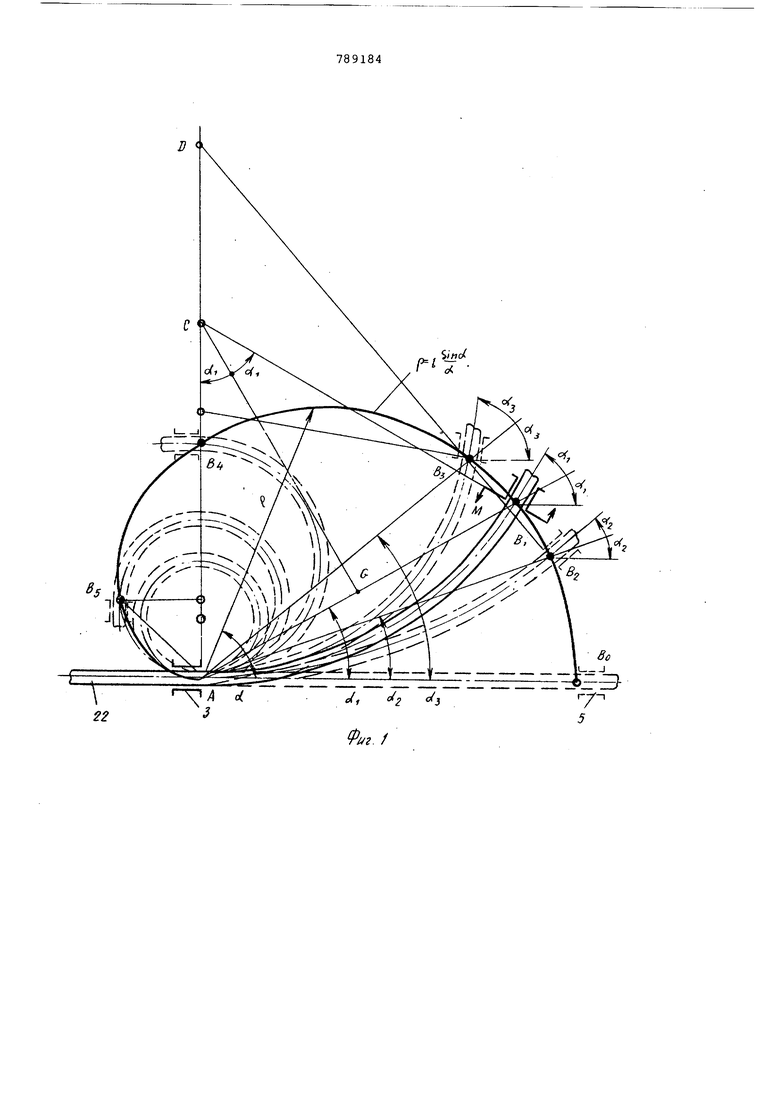
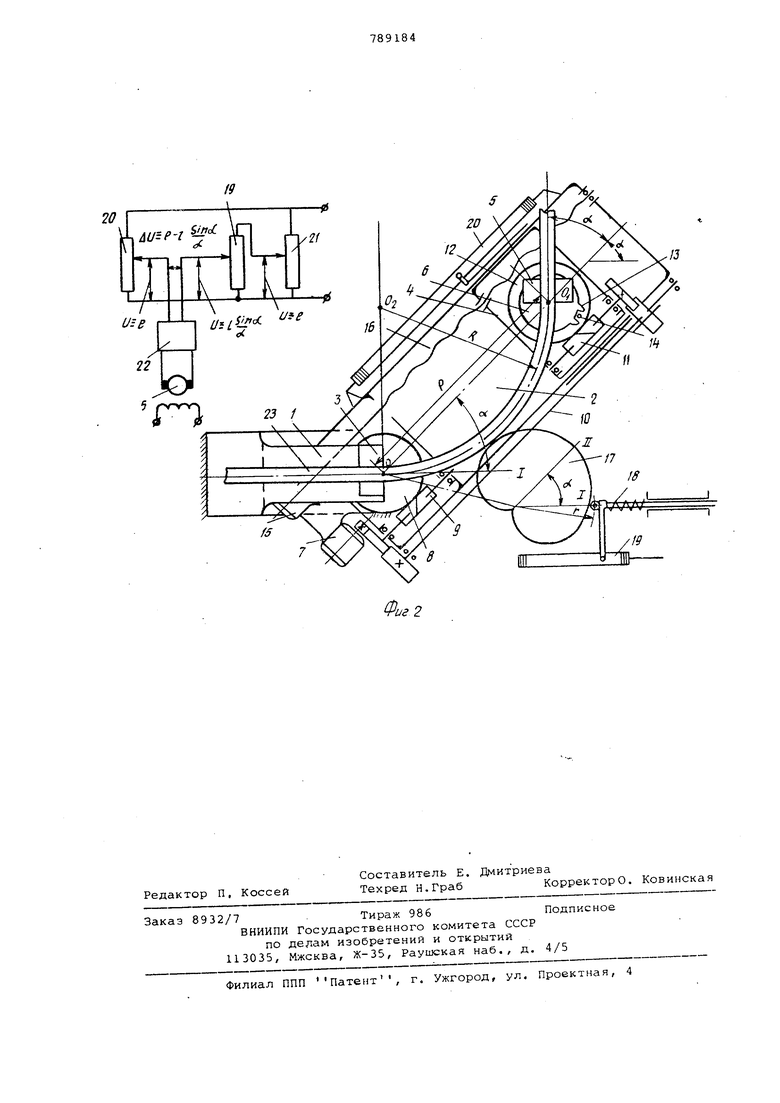
Изобретение относится к обработк металлов давлением и может быть использовано при гибке изделий из тру с наполнителем пруткового или полос вого материала. Наиболее близким к изобретению п технической сущности и достигаемому результату является устройство для гибки труб с одновременной осевой осадкой, содержащее смонтированные ка станине неподвижный зажим и на приводной каретке подвижный зажим,а также механизм осевой осадки трубы .Его недостаток заключается в том что с изгибаемой трубой контактирую опорные элементы с желобами, что не исключает появление побочных деформаций трубы. Цель изобретения - повышение каче ства гибки изделий, имеющих сложную форму. Указанная цель достигается тем, что устройство снабжено смонтированной на станине рамой с приводом ее поворота, на которой установлена каретка с подвижным зажимом, приводом возвратно-поступательного перемещения каретки вдолБ рамы и кинематически связанным с приводом рамы механизмом поворота подвижного зажима относительно каретки, а механизм осёвой осадки трубы выполнен в виде размещенного на станине повортного кулачка, подпружиненного к нему штока и электрически связанного с приводом каретки потенциометра с целью корректировки угла пружинения изгибаемого изделия за счет перегиба трубы на величину угла пружинения. Кинематическая цепь механизма поворота подвижного зажима выполнена с зазором в направлении угла поворота зажима и снабжена индикатором для замера зазора . На фиг. 1 изображена схема, поясняющая принцип работы устройства; на фиг. 2 - кинематическая схема в плане и электрическая схема устройства. Устройство содержит с.танину 1, раму 2, которая может поворачиваться в подшипниках станины вокруг вертикальной оси; неподвижный зажим 3, смонтированный в верхней части так, что ось симметрии его.правой торцовой плоскости герметически совпадает с осью О поворота рамы, каретку 4, имеющую возможность перемещат ся вдоль направляющих рамы. Подвижн зажим 5 находится на диске 6, котор может поворачиваться вокруг вертикальной оси в подшипниках каретки 4; ось симметрии левой терцовой плоскости подвижного зажима гермети чески совпадает- с осью поворота дис 6. Привод поворота рамы состоит из двигателя 1, уставовленного на раме 2, червячного колеса8, неподвижног относительно станины, червяка 9, находящегося в зацеплении с колесом 8 и соединенного с. валом двигателя 1, пшицевого вала 10, зубчатыхколе и червяка 11, находящегося в зацеплении с червячным колесом 12.. Последнее, установлено на подшипниках в каретке, на одной герметической оси с диском б, соединяется с ним посредством вилки 13 и упора 14 с незначительным зазором по углу поворота для корректировки пружинения Предусмотрены также индикатор величины этого зазора и угломерная шкала поворота (не показаны). Кинематичес ким подобием элементов зацепления червячных пар 8 , 9 и 11, 12 обеспечивается одновременный изгиб труб на один и тот же угол у подвижного и неподвижного зажимов. . Привод радиального перемещения каретки состоит из двигателя 15, также закрепленного на раме 2, ходо вого винта 16, установленного на под шипниках вдоль рамы и соединенного с кареткой 4 посредством ходовой гайк Кулач.ковый механизм смонтирован на оси поворота рамы и состоит из к лачка 17, жестко соединенного с рамой и поворачивающегося вместе с не на один и тот же угол, и ведомого звена (подпружиненного к периферии кулачка штока 18)., причем кулачок спрофилирован так, что при eroi. повороте он, воздействуя через шток 18 и потенциометр 19 на привод радиального перемещения каретки, обеспечивает перемещение точки О относитель но точки О по траектории, определяющ ся зависимостью р-г. где р - текущее значение расстояний между точками О и ; С - длина изгибаемого участка; oL -угол поворота прямой, соединяющей конечные точки изгибаемого участка. При .этом ось неподвижного зажима 3 касательна к окру;:ности с радиусом Электрическая часТь устройства .содержит потенциометр 19,.смонтирова ный вдоль штока 18, причем его движо механически соединен со штоком потенциометра 20 радиального перемещения каретки, смонтированного вдоль направляющих рамы 2, причем его движок механически соединен с.кареткой; потенциометра. 21 задания длины изгибаемого участка и схемы сравнения и управления 22 двигателем перемещения каретки. На фиг. 1 угол d.- начальный угол изгиба без учета угла пружинения; начальный угол изгиба после снятия нагрузки; (d. d) - угол пружинения; угол последующего изгиба с перегибом- на угол пружинения, то есть о( с(+( oijT- -i) / и после снятия нагрузки он дает необходимый вначале угол (Л; .f - радиус гибки для дуги окружности АВ; . Р диус гибки для дуги окружности АВ. Устройство работает следующим образом. 1.Чертеж изготавливаемого изделия разбивается на участки, в пределах каждого из которых радиус гибки R имеет постоянное значение. Составляется таблица, в которой для каждого участка указывается его длина Е и угол изгиба ot-t , причем к нему прибавляется угол пружинения, если он уже известен. Если же угол пружине-, ния неизвестен, то он корректируется в процессе гибки. 2.Рама устанавливается в положе;Ние,; когда ось каретки 0 совпадает с,осью поворота рамы О, подвижный и неподвижный зажим соприкасаются Торцами. 3.. Правый конец изгибаемого участка трубы 23 фиксируется подвиншым зажимом 5. 4.Потенциометром 21 задают длину Е изгибаемого участка. При этом двигатель радиального перемещения 15, реагируя;- на разность между напряжением, пропорциональным заданной длине С и напряжением потенциометра 20, пропорциональным фактическому расстоянию между подвижным и нёподвижным зажимами, перемещает каретку вместе с зажатой трубой на заданную длину, 5.Левый конец изгибаемого участка фиксируют неподвижным зажимом 3, 6.Включают двигатель поворота рамы 7 для полученияпервого необходимого угла изгиба; Одновременно с рамоли поворачивается кулачок 17, вызывая перемещение движка потенциометра 19; на двигатель 15 радиального перемещения подается напряжение потенциометров 20, 21, в результате чего двигатель 15 приходит в движение и перемещает каретку в радиальном направлении, обеспечивая перемещение точки О по траектории, определяющейся зависимостью я- - 7.После достижения заданного угла загиба двигатель поворота рамы останавливают.
8.Для корректировки пружинения, если угол пружинения неизвестен, двигатель поворота рамы переключают на обратный ход, снимая Ешпряжение с изогнутой трубы; одновременно с поворотом рамы в обратном направлени двигатель 15 также перемещает каретку обратно в радиальном направлении.
В момент окончания распружияивания трубы меняется зазор между упором 14 и вилкой 13,
9.Двигатель поворота останавливают, измеряют по угломерной шкале угол пружинения.
10.Включают двигатель поворота 3 первоначальном направлении.
11.Когда угол загиба будет равен сумме заданного угла и угла пружинения, двигатель поворота переключают
на обратный ход,
12.Когда рама придет в положение
соответствующее заданному углу гибки,
- двигатель поворота останавливают.
Если угол пружинения известен, то пункты 8-12 отпадают.
После получения первого участка изогнутого изделия станок перестраиБается на следующий участок, меняя длину. Процесс гибки осуществляется в указанной последовательности.
Данное изобретение позволяет -повысить качество гибки изделий, имеющик сложную форму.
Формула изобретения
1,Устройство для гибки труб с одновременной осевой осадкой, содержащее
смонтированные на станине неподиижный зажим и на приводной каретке подвижный зажим, а также механизм осевой осадки трубы, о тл и ч а ю щ е е с я тем, что, с целью повышения качества гибки изделий, имеющих сложную форму, оно снабжено смонтированноУ на станине рамой с приводом ее поворота, на которой установлена каретка с подвижHfcJM зажимом, приводом возвратно-поступательного перемещения каретки вдоль рамы и кинематически связанным с приводом рамы механизмом поворота подвижного зажима относительно каретки, а механизм осевой осадки трубы выполнен в виде размещенного на станине поворотного кулачка, подпЕзужиненного к нему штока и электрически связанного с приводом каретки потенцио.метра.
2, Устройство по п. 1, о т л и ч аю щ е е с я тем, что, с целью корректировки угла.пружинения изгибаемого изделия за счет перегиба трубы на величину угла-пружинения, кинематическая цепь механизма поворота подвижного зажима выполнена с зазором в направлении угла поворота зажима и снабжена индикатором для замера зазора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство CCCJ № 530717 кл. В 21 D 7/10, 1971. ffl Г- 
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Трубогибочная машина | 1985 |
|
SU1299655A1 |
| ТРУБОГИБОЧНЫЙ СТАНОК | 1987 |
|
SU1429414A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЗМЕЕВИКОВОГО ЭЛЕМЕНТА С U-ОБРАЗНЫМИ КОЛЕНАМИ ЗАДАННОЙ КРИВИЗНЫ ГИБКОЙ МОНОМЕТАЛЛИЧЕСКИХ ИЛИ БИМЕТАЛЛИЧЕСКИХ ОРЕБРЕННЫХ ТРУБ | 2006 |
|
RU2381859C2 |
| Станок для гибки труб | 1978 |
|
SU753518A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Способ изготовления волноводов сложной формы и устройство для осуществления способа | 2016 |
|
RU2634815C1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| Способ гибки труб и станок для осуществления способа | 2020 |
|
RU2774676C2 |