1
Изобретение относится к машиностроению и может быть использовано при проектировании установок для гибки труб на котлостроительных заводах.
Известно устройство для гибки труб, содержащее неподвижный зажим, размещенный в направляющих каретки подвижный зажим, а также гибочный щаблон с изменяющимся радиусом-кри- д визны .
Подлежащий гибке участок трубы закрепляется в зажимах устройства, после чего производят перемещение каретки с помещенным на ней подвиж- 15 ным зажимом по специальной траектории, после чего происходит изгиб с осевым поджатием труба с одновремен.ннм формированием его в гибочном шаблоне устройства.20
Тчкое устройство позволяет осуществлять гибку труб преимущественно на,
малые радиусы с одновременным обеспечением осевого поджатия, поэтому такая конструкция довольно сложна ки-25 нематически, так как предполагает перемещение каретки по сложной кривой, а также необходимость наличия сложного гибочного шаблона с изменяю щимсярадиусом кривизны.30
Для осуществления неответственных гибов на радиус больше одного диаметра трубы более известен станок япя изгибания профилей и труб, состоящий из двух вращающихся в разные стороны зажимных патронов, установленных с возможностью сближения 2 ,
. Зажимные патроны таимого устройства установлены на подвижных каретках и при включенном силовом приводе могут вращаться в разные стороны с одновременным сближением под действием сгигбаемой.3 аготов ки,
Гибка трубы на таком станке происходит поя действием ттостоянного по длине заготовки изгибающего момента, что обеспечивает качественный, лишенный )в ги$. Однако для осуществления гибки указанная конструкция станка предполагает обязательное вращение обоих зажимных патронов, что исключает возможность осуществления гиба на длинной трубе - наиболее час,то встречающемся технологическом процессе в котлостроенил.
Цель изобретения - расширение диапазона длин обрабатываемых труб.
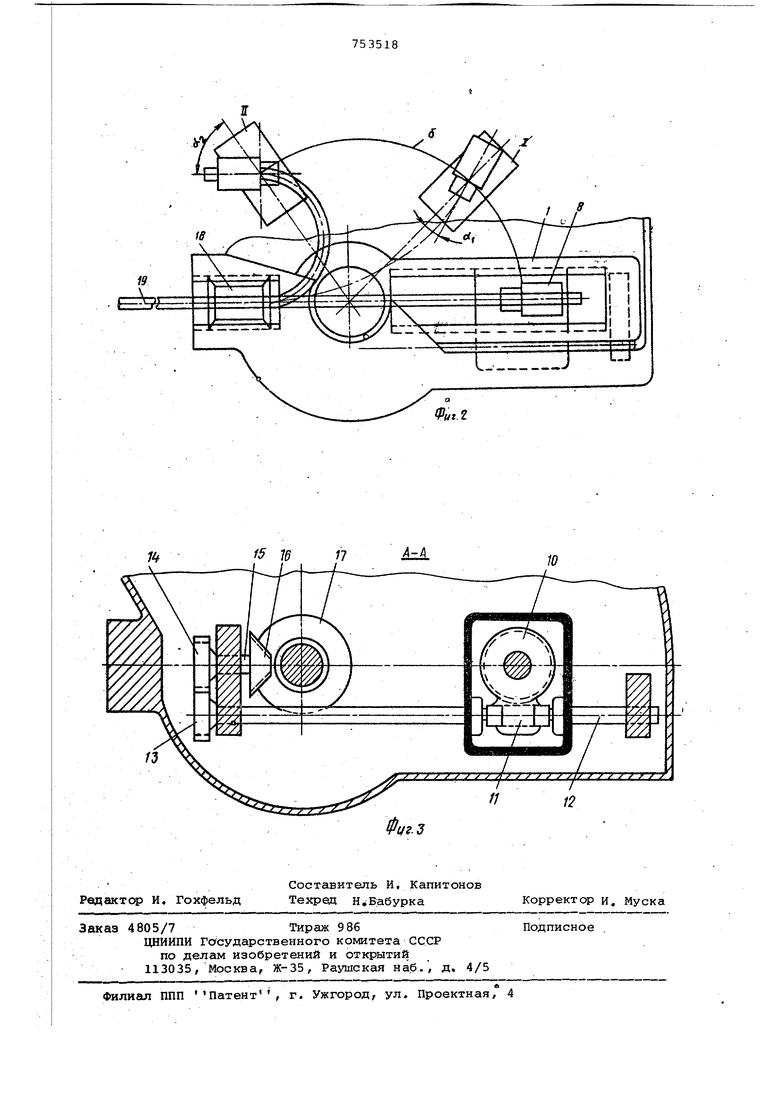
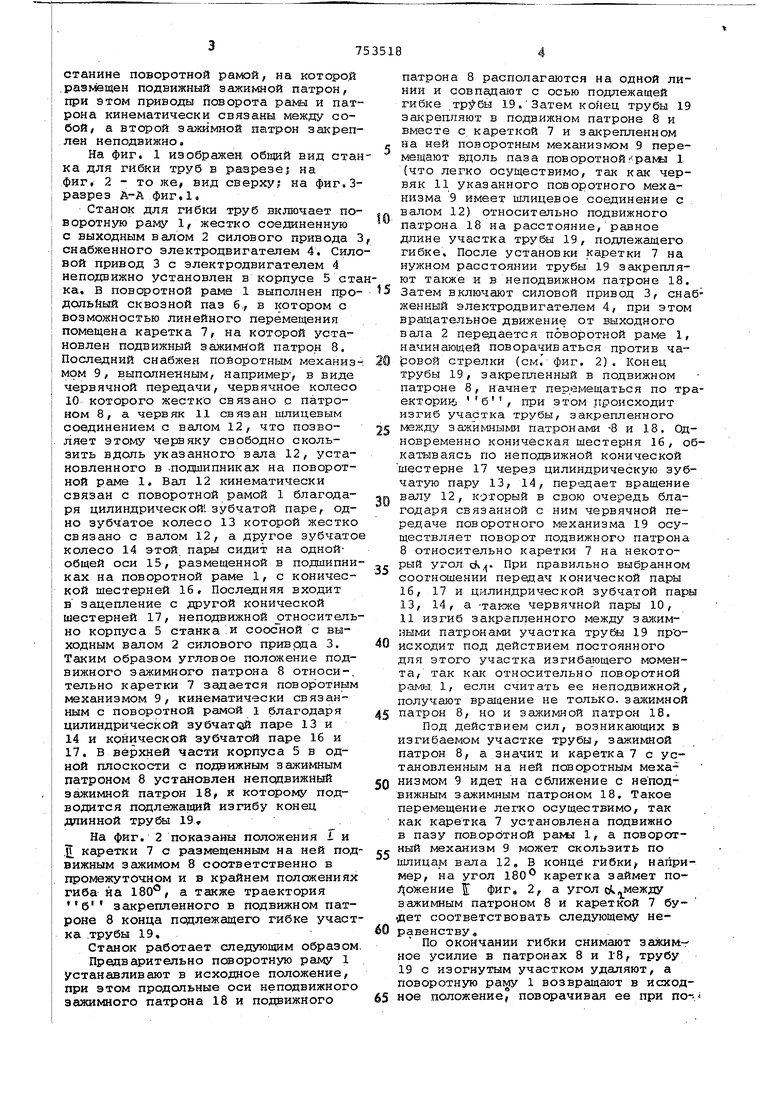
Поставленная цель достигается тем, что станок снабжен установленной в станине поворотной ранюй, на которой .размещен подвижный зажимной патрон, при этом приводы поворота рамы и пат рона кинематически связаны между собой, а второй зажимной патрон закреп лен неподвижно. На фиг. 1 изображен, общий вид ста ка для гибки труб в разрезе на фиг, 2 - то же, вид сверху; на фиг.З разрез А-А фиг,1а Станок для гибки труб включает по воротную раму 1/ жестко соединенную с выходным валом 2 силового привода снабженного электродвигателем 4. Сил вой привод 3 с электродвигателем 4 неподвижно установлен в корпусе 5 ст ка, в поворотной раме 1 выполнен про дольйый сквозной паз б., в котором с возможностью линейного перемещения помещена каретка 7, на которой установлен подвижный зажимной патрон 8. Последний снабжен поворотным механиз мом 9, выполненным, например-, в виде червячной передачи, червячное колесо 10 которого жестко связано с патроном 8, а червяк 11 связан шлицевым соединением с валом 12, что позволяет этому червяку свободно скользить вдоль указанного вала 12, установленного в .подшипниках на поворотной раме 1. Вал 12 кинематически связан с поворотной рамой 1 благодаря цилиндрической , зубчатой паре, одно зубчатое колесо 13 которой жестко связано с валом 12, а другое зубчато колесо 14 этой пары сидит на одной общей оси 15, размещенной в подшипни ках на поворотной раме 1, с конической щестерней 16, Последняя входит в зацепление с другой конической шестерней 17, неподвижной ртноситель но корпуса 5 станка и соосной с выходным валом 2 силового привряа 3. Таким образом угловое положение подвижного зажимного патрона 8 относи-, тельно каретки 7 задается поворотным механизмом 9, кинематически связанным с поворотной рамой i благодаря цилиндрической зубчатой паре 13 и 14 и крнической зубчатой паре 16 и 17. В верхней части корпуса 5 в одной плоскости с подвижным зажимным патроном 8 установлен неподвижный зажимной патрон 18, к которому подводится подлежащий изгибу конец длинной трубы 19 На фиг. 2 показаны положения i и . каретки 7 с размещенным на ней под вижным зажимом 8 соответственно в промежуточном и в крайнем положениях гиба на 180, а также траектория б закрепленного в подвижном патроне 8 конца подлежащего гибке участ ка .трубы 19. Станок работает следующим образом Предварительно поворотную раму 1 устанавливают в исходное положение, при этом продольные оси неподвижного эажимного патрона 18 и подвижного патрона 8 располагаются на одной линии и совпадают с осью подлежащей гибке 19.Затем конец трубы 19 закрепляют в подвижном патроне 8 и вместе с кареткой 7 и закрепленном йа ней поворотным механизмом 9 перемещают вдоль паза поворотной .раки 1 (что легко осуществимо, так как червяк 11 указанного поворотного механизма 9 имеет щлицевое соединение с : валом 12) относительно подвижного патрона 18 на расстояние,равное длине участка труйл 19, подлежащего гибке. После установки каретки 7 на нужном расстоянии трубы 19 закрепляют также и в неподвижном патроне 18. Затем включают силовой привод 3, снабженный электродвигателем 4, при этом вра111ательное движение от выходного вала 2 передается поворотной раме 1, начинающей поворачиваться против чаровой стрелки (см , фиг. 2) . Конец трубы 19, закрепленный в подвижном патроне 8, начнет перемещаться по тра5, при этом происходит екторий изгиб участка трубы, закрепленного между зажимными патронами -8 и 18. Одновременно коническая шестерня 16, обкатываясь по неподвижной конической шестерне 17 через цилиндрическую зубчатую пару 13, 14, перздает вращение валу 12, который в свою очередь благодаря связанной с ним червячной передаче поворотного механизма 19 осуществляет поворот подвижного патрона 8 относительно каретки 7 на некоторый угол сК. При правильно выбранном соотношении передач конической пары 16, 17 и цилиндрической зубчатой пары 13, 14, а также червячной пары 10, 11 изгиб закрепленного между зажимными патронами участка трубы 19 происходит под действием постоянного дпя этого участка изгибающего момента, так как относительно поворотной рама. 1, если считать ее неподвижной, получают вртцение не только, зажимной патрон В, но и зажимной патрон 18. Под действием сил, возникающих в изгибаемом участке трубы, зажимной патрон 8, а значит и каретка 7 с установленным на ней поворотным механизмом 9 идет на сближение с неподвижным зажимным патроном 18. Такое перемещение легко осуществимо, так как каретка 7 установлена подвижно в пазу поворотной раг 1, а поворотный механизм 9 может скользить по шлицам вала 12. В конце гибки например, на угол 180 каретка займет по/(ожение | фиг. 2, а угол Ы между зажимным патроном 8 и кареткой 7 будет соответствовать следующему неравенству« По окончании гибки снимают зажимное усилие в патронах 8 и 18, трубу 19 с изогнутым участком удаляют, а поворотную раму 1 возвращают в исходное положение поворачивая ее при помощи силового привода 3 по часовой стрелке.
Из приведенного аайае следует,что в данной конструкции станка изгиб трубы происходит-под действием постоянного по длине участка гиба изгибающего момента. Однако в станке один из двух зажимных патронов остается неподвижным, что позволяет осуществить качественный гиб на сравнительно длинной трубе. Последнее обстоятельство позволяет существенно расширить диапазон использования станка.
Формула изобретения
Станок для гибки труб, содержащий два зажимных патрона, один из которых смонтирован на станине, а другоьустановлен с возможностью перемещения в осевом направлении и поворота от привода, отличающийся тем, что, с целью расширения диaпaзqна длин обрабатываемых труб, он снабжен установленной в станине с возможностью поворота от привода рамой, на которой размещен подвижный зажимной патрон, при зтом приводы поворота рамы и подвижного патрона кинематически связаны между собой, второй зажимной патрон закреплен неподвижно.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 539717, кл. В 21 D 7/10, 1971.
2, Авторское свидетельство СССР № 95020 кл. В 21 D 7/02, 1951 (прототип) .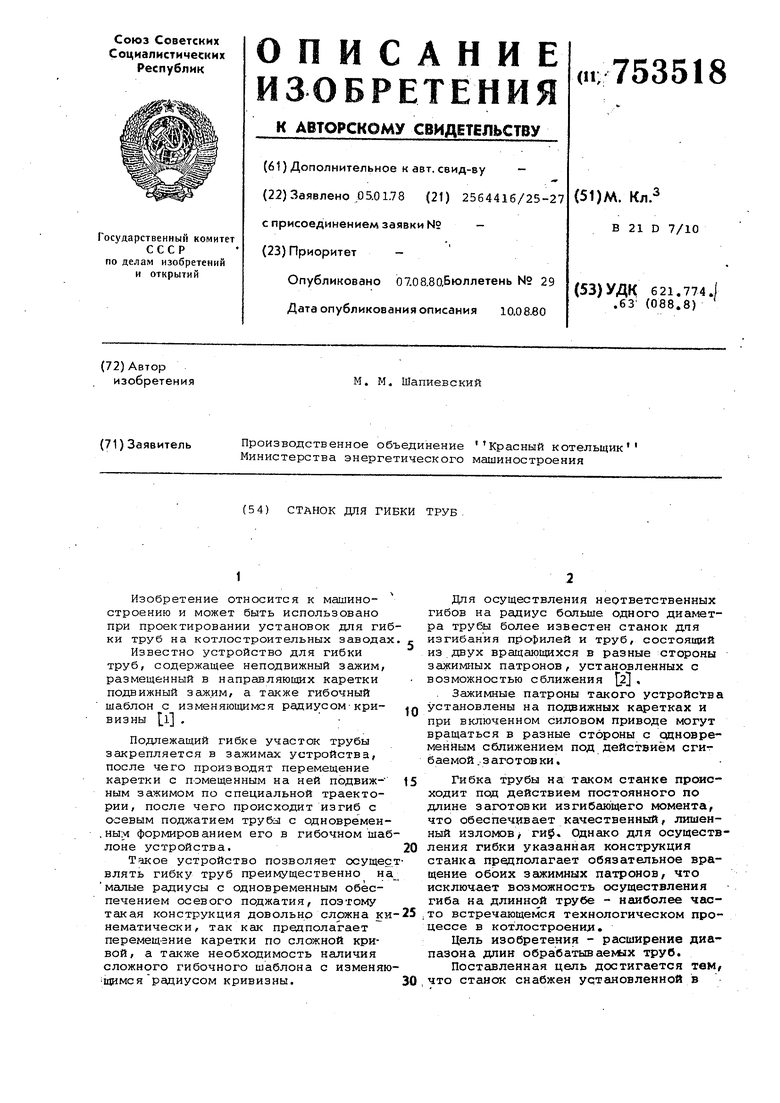
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2614975C1 |
| СТАНОК ДЛЯ ГИБКИ ТРУБ | 1970 |
|
SU271268A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Способ гибки труб и станок для осуществления способа | 2020 |
|
RU2774676C2 |
| Трубогибочный станок | 1988 |
|
SU1637902A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Способ гибки труб и станок для осуществления способа | 2018 |
|
RU2713899C2 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |