(54) СКАНИРУЮЩЕЕ УСТРОЙСТВО К ДЕФЕКТОСКОПУ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля изделий | 1988 |
|
SU1566284A1 |
| Самоходное сканирующее устройство для дефектоскопии внутренней поверхности трубопроводов | 1989 |
|
SU1698737A1 |
| Сканирующее устройство для дефектоскопии внутренней поверхности трубы | 1978 |
|
SU748239A1 |
| Сканирующее устройство для дефектоскопии внутренних поверхностей труб | 1983 |
|
SU1326982A1 |
| Сканирующее устройство для неразрушающего контроля цилиндрических полостей | 1980 |
|
SU911308A1 |
| УСТРОЙСТВО ДЛЯ СПЛОШНОГО СКАНИРУЮЩЕГО КОНТРОЛЯ КАЧЕСТВА НЕПОВОРОТНЫХ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 2011 |
|
RU2455625C1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНКИ БАКА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1685197A1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
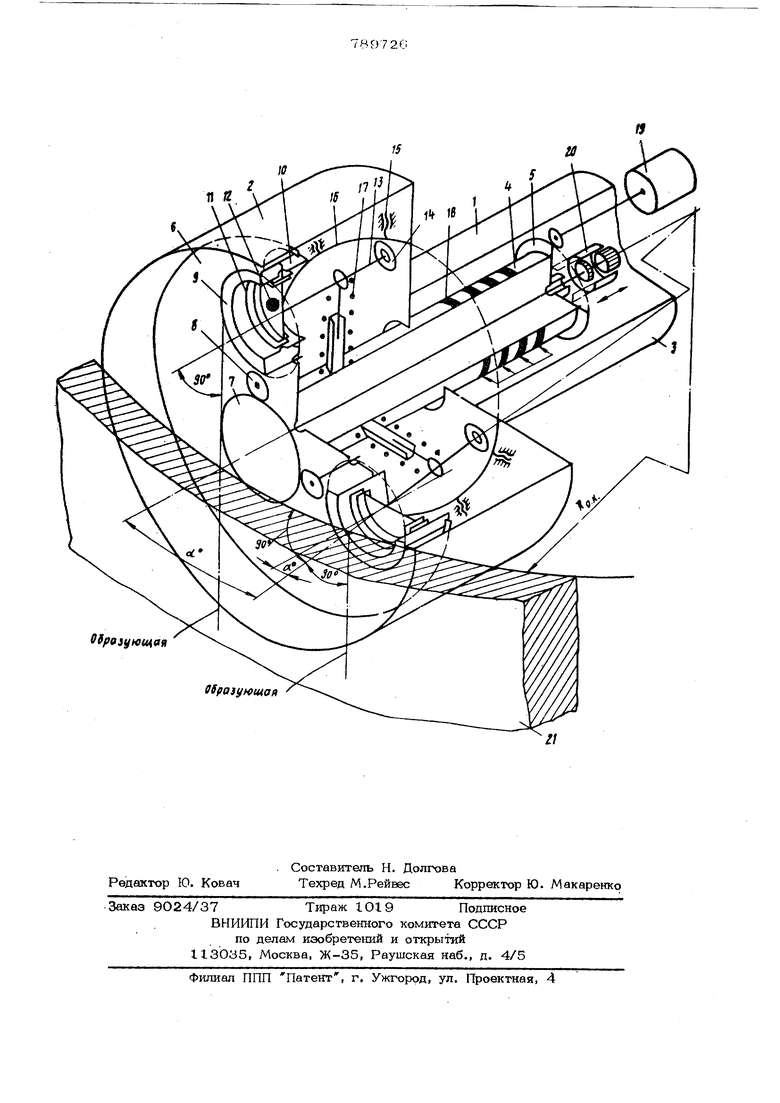
Изобретение относится к области не разрушающего контроля металлических изделий как с плоскими, так и кривыми Ловерхностями и с использованием ультразвуковых, вихротоковых и феррозондовых методов и может найти применение, например, в нефтегазовой, химической и энергетической промьпиленности. Известно устройство для неразрушающего контроля, состояния металла цилиндрических сосудов большой SvlKOCTH, например ультразвуковым методом, тфед ставляющее собой перемеш иошуюся вдол и вращающуюся вокруг собственной оси мачту с телескопической штангой, на которой расположены преобразователи дефектоскопа. Обследование внутренней поверхности ттроизводится по винтовой линии с шагом 3-10 мм, зависящим от локальности пятна контроля преобраэователя l. Недостатком этого устройства являет низкая производительность я точность контроля. Наиболее близким по техни 1еской сущности к предлагаемому является сканирующее устройство к дефектоскопу,-содержащее цилиндрический корпус, соосный с ним ротор с токосъемником и диском для размещения преобразователей и привод вращения ротора 2. Недостатками данного устройства является ограниченность номеклатуры изделий и низкая точность контроля, вызванная погрешностью измерений, возвращающей с уменьшением кривизны контролируемой поверхности. Цель изобретения - повышение достоверности и точности контроля. Поставленная цель достигается тем, что устройство снабжено планетарной передачей и платформами, установленными на сателлитах этой передачи с возможностью периииденчя вдоль оси сателлита И-. поворота в перпендикулярной ей плоскости, а также механизмом утфавления степенями свободы платформы, выполненным из сменного регулируемого копира и штанги, кинемгич ски связывающей платформу с копиром. На чертеже представлено устройство в изометрической проекции с вырезом одной четверти. Все функциональные узлы устройства установлены в цилиндрическом Корпусе I состоящем из жестко слединенных меж ду собой цилиндров 2 J 3 большого и малого диаметров. В корпусе 1 установлен полый ротор 4, заканчивающийся с одной стороны зубчатым колесом 5, с другой - многопозиционным диском 6, н сущим несколько параллельных планетар ных зубчатых передач, сос1оящих из общего солнечного солеса 7, паразитных колес в и сателлитов 9. В сателиттах 9 шаршфно на цапфах 10 установлены поворотные рамки 11, в которых расположены платформы 12 с возможностью продольного перемещения вдоль оси сате лита и .вращения вокруг собственной оси. Платформы 12 предназначены для размещения преобразователей (на чертеже; не показаны). С платформами жестко скреплены штанги 13, заканчиваю щиеся роликами 14, опирающимися на регулируемый с помощью винтовых пар 15 сменный копир 16, размер и форма которого зависят от вида контролиру - мой поверхности. Пружиной 17 :сжатая штанга 13 подпружинена относительно ротора 4. На роторе смонтирован токосъемник-коммутатор 18с контактными кольцами (позиция не указана), набранными из сегментов, число которых равно чийлу преобразователей. Со стороны, противоположной диску 6, установлен привод 19 вращения и соединительная муфта 20. В зависимости от кривиз контролируемой поверхности устройство собирается следующим образом. Для контроля плоскостей и сфер применяется- копир 16 круглой формы, вели чина его диаметра регулируется винтовы парами 15, сателлиты 9 устанавливаютс так, чтобы оси цапф tO поворотных рамок 11 ориентировались по касательной к окружности центров сателлитов, муфта 2О соединяет солнечное колесо 7 с ротором 4, для контроля цилиндров копир 16 овальной формы; винтовыми парами 15 регулируется размер его малой оси; оси цапф 10 поворотных рамок 11 должны быть параллельными между собой и большой оси овала копира; муфта 20 соединяет солнечное колесо 7 с корпусом I. 7 6 Устройство работает следующим образом. Первоначально его устанавливают на определенном расстоянии и перпендикулярно относительно контролируемой поверхности 2J.. При включении привода 19 вращательное движение передается на ротор 4 с помощью токосъек1Ника-коммутатора 19, последовательно включается в раоту установленные на платформах пребразователи дефектоскопа. Величина сектора (размер строки) работы каждого преобразователя зависит от количества позиций на диске для их установки. При контроле, например, цилиндрических поверхностей вращательное движение диска 6 преобразуется в поступательное перемещение сателлита 9, т.е. оси цапф 10 рамок II перемадаются парал лельно самим,себе и образующей цилиндра. Одновременно платформы 12, установленные в рамках и управляемые копиром I 6 посредством штанги 13, разворачиваются на угол ci (как показано на чертеже) и перемещаются вдоль собственной оси, чем достигается перпендикулярность оси платформы 12 контролируемой поверхности цилиндра и постоянство расстояния до нее в пределах полного оборота ротора 4. Поступательное перемещение устройства может осуществляться как вдоль образующей контролируемого цилиндра, так и по окружности контролируемой поверхности любыми средствами передвижения, при этом осуществляется построчный осмотр поверхности. Длина и шаг строки, частота строки и, следовательно, производительность осмотра зависят от числа преобразователей на диске и диктуются тем или иным методом контроля. Например, при контроле ультразвуком сфокусированным методом шаг строки равен 1-1,5 мм, а вихретоковым 5-8 мм, скорость вращения может меняться в пределах от 1О до 1ООО об/мин. При контроле ультразвуковым методом устройство может работать как под слоем воды, так и на сухих изделиях. Для этого цилиндр 2 большего диаметра конструктивно должен быть выполнен с уплотнительной манжетой на торце и исполнять роль иммерсионной ванны, а полость корпуса , в которой разметцен токосъемник, герметизирована. Возможнскзть применения устройства для контроля металлических сосудов с кривыми поверхностями, например, корпусов реакторов АЭС, парогенераторов, барабан-сепараторов и т.п. с обеспечением точной ориентации входных преобразователей по углу ввода сигнала и зазору относительно контролируемой поверхности позволит повысить точность контроля . металлообъектов с кривыми поверхностями, значительно сократить сроки регламентных остановов аппаратов,для их конт роля, благодаря высокой производительности контроля, эффективно выявлять .различные дефекты технологического, коррозионного И усталостного происхождения. Формула изо б.р е т е н и я Сканирующее устройство к дефектоско пу, содержащее цилиндрический корпус, Ьоосный с ним ротор с токосъемником и диском для размещ енйя. преобразователей
и привод вращения ротора, о т л и ч а:ю щ е е с я тем, что, с целью повышения достоверности и точности контроля, оно снабжено планетарной передачей и
платформами, установленными на сателлитах этой передачи с возможностью перемадения вдоль оси сателлита и поворота в пёрпендикул$фной ей плоскости, а также механизмом управления степенями свободы платформы, выполненными из сменного регулируе ого копира и штанги, кинематически связывающей платформу с копиром . Источники информации, принятые во внимание при экспертизе 1.Атомная энергия , 1977, том 42, N 1. 2.Авторское свидетельство СССР № 4О6156, кл. GOIN 29/04, 1971 , (прототип). )ЩвЯ Образующая
