Изобретение относится к неразрушающему контролю качества неповоротных цилиндрических деталей, в частности трубопроводов.
Известно устройство для сплошного сканирующего контроля качества неповоротных изделий цилиндрической формы, содержащее блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными и механизм перемещения по винтовой траектории, обеспечивающий возможность изменения направления движения (см. патент РФ на полезную модель №55141, опубл. 27.06.2006).
Недостатками известного устройства является низкая скорость сканирования трубопровода, повышенные материалоемкость конструкции устройства и сложность механизма перемещения, влекущие за собой снижение надежности и увеличение трудоемкости проведения дефектоскопии.
Техническим результатом предлагаемого технического решения является упрощение конструкции устройства, увеличение скорости сканирования при сохранении надежности выявления дефектов и точности определения их координат в теле неповоротного объекта контроля цилиндрической формы, например трубопровода.
Технический результат достигается в результате того, что в известном устройстве для сплошного сканирующего контроля качества неповоротных изделий цилиндрической формы, содержащем блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными и механизм перемещения по винтовой траектории, обеспечивающий возможность изменения направления движения, согласно заявленному изобретению механизм перемещения выполнен в виде цепи с опорными роликами (колесами), в которой одна из пар смежных звеньев разнесена вдоль оси изделия цилиндрической формы, например трубы, и соединена посредством платформы с элементами крепления, расположенными на расстоянии, равном шагу винтовой траектории сканирования.
Для обеспечения высокой стабильности величины шага сканирования и исключения заклинивания устройства звенья цепи могут быть выполнены в виде платформ, которые соединены между собой шпильками, с возможностью вращения относительно оси последних. С целью обеспечения возможности диагностирования широкого типоразмерного ряда (широкого диапазона диаметров) неповоротных объектов контроля цилиндрической формы цепной механизм перемещения может содержать различное количество платформ-звеньев. Перенастройка механизма перемещения с одного типоразмера объекта контроля на другой осуществляется изменением числа платформ-звеньев, установленных в цепи, для чего с помощью резьбового участка соединительных шпилек и гаек крепится или снимается дополнительное звено-платформа.
Для обеспечения высокой стабильности шага сканирования соединительные шпильки (оси) могут быть установлены в соединяемых платформах-звеньях с помощью подшипников. Лучший результат достигается при фиксации каждой соединительной шпильки с помощью четырех подшипников, по два на каждое из соседних соединяемых звеньев.
Платформы цепи механизма перемещения могут быть оснащены всего лишь одной парой опорных роликов или колес каждая, расположенными на осях, причем на двух звеньях-платформах в кронштейнах установлены двигатели, вращение от которых передается на оси опорных роликов при помощи цепной передачи.
Блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может включать в себя: электрошкаф, установленный на одной из платформ, комплект диагностических датчиков, смонтированных с помощью кронштейнов на одной из платформ с возможностью регулировки расстояния от поверхности датчиков до поверхности объекта контроля и их положения относительно образующей цилиндрической поверхности этого объекта, батареи электропитания, закрепленные на свободной (или свободных) от диагностического оборудования платформе (или платформах) и пульт дистанционного управления.
Блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может включать в себя систему намагничивания и датчики измерения напряженности или индукции магнитного поля рассеивания над дефектами в объекте контроля. В качестве намагничивающей системы возможно применение электрических магнитов или постоянных магнитов из материалов, содержащих редкоземельные элементы. Для регистрации магнитных полей рассевания возможно применение датчиков Холла, феррозондовых датчиков или других известных датчиков требуемой чувствительности.
Блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может включать в себя вихретоковые датчики для обнаружения несплошностей и измерения удельного электрического сопротивления металла.
Блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может включать в себя электромагнито-акустические (ЭМА) преобразователи. Оснащение сканера-дефектоскопа этим типом датчиков обеспечивает возможность измерения толщины стенки объекта контроля и технологических дефектов.
Блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может включать в себя видеокамеры и другие известные оптические устройства диагностирования внешней поверхности объекта контроля. Например, сканер-дефектоскоп может быть оснащен лазерными дальномером и профилометром для оценки чистоты обработки поверхности объекта контроля или глубины коррозионных дефектов.
Блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может включать в себя датчики определения координат местоположения сканера дефектоскопа и выявленных аномалий.
В качестве двигателей могут быть применены двигатели внутреннего сгорания, например двухтактные, или электрические двигатели, например вентильные двигатели переменного тока или двигатели постоянного тока.
Изобретение поясняется чертежами.
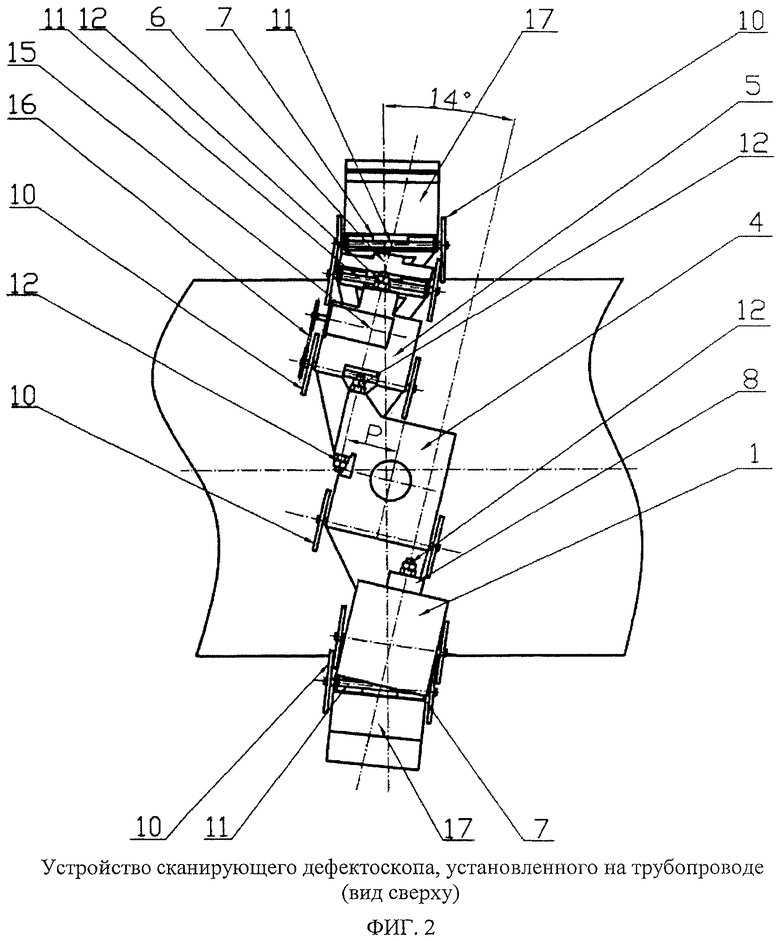
Фиг.1. Устройство сканирующего дефектоскопа, установленного на трубопроводе (вид вдоль оси трубы).
Фиг.2 Устройство сканирующего дефектоскопа, установленного на трубопроводе (вид сверху).
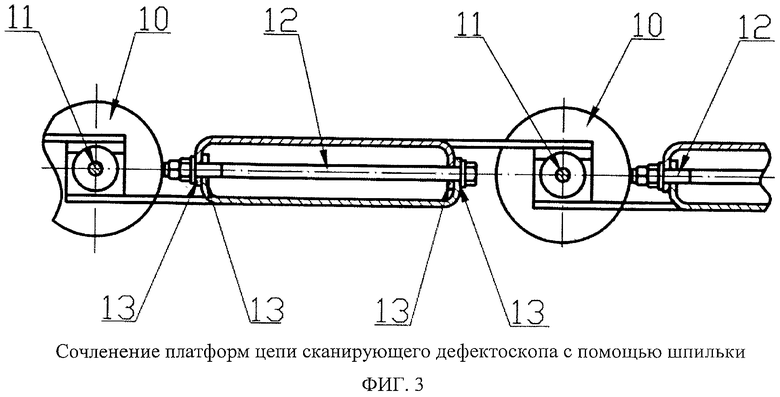
Фиг.3. Сочленение платформ цепи сканирующего дефектоскопа с помощью шпильки.
Устройство для сплошного сканирующего контроля качества неповоротного объекта контроля цилиндрической формы содержит сканирующий дефектоскоп, включающий механизм перемещения по винтовой траектории с возможностью изменения направления движения, электрошкаф 1 с блоками и т.д. контрольно-измерительной аппаратуры, дистанционного управления и обмена данными, а также комплект диагностических датчиков 2, который установлен с помощью кронштейна 3 на механизме перемещения. Механизм перемещения выполнен в виде цепи с опорными роликами или колесами 10, в которой одна из пар смежных звеньев 1, 5 цепи (см. Фиг.2) разнесена вдоль оси трубы на шаг винтовой линии сканирования и соединена посредством платформы 4 с элементами крепления, расположенными на расстоянии, равном шагу винтовой траектории сканирования Р. Звенья цепи выполнены в виде платформ 4, 5, 6, 7, 8, 9 с роликами или колесами, расположенными на осях 11.
Для обеспечения высокой стабильности величины шага сканирования Р и исключения заклинивания устройства звеньев (платформы 4, 5, 6, 7, 8, 9) цепи соединены между собой соединительными шпильками 12 с возможностью поворота звеньев относительно последних. Соединительные шпильки 12 установлены на платформах звеньев в необходимом пространственном положении с помощью подшипников 13. С целью повышения стабильности шага сканирования Р на каждой платформе расположено по два подшипника 13 для установки соединительной шпильки 12, которыми звено-платформа соединяется с соседней. Таким образом, каждая соединительная шпилька 12 устанавливается в четырех опорах подшипниках 13 по две опоры на каждое звено.
На двух платформах 5 и 9 с помощью кронштейнов 14 установлены электрические двигатели 15. Валы двигателей 15 соединены с осями 11 роликов 10 платформ 5 и 9 при помощи цепной передачи 16. В качестве двигателей 15 могут быть применены двигатели внутреннего сгорания, например двухтактные, или электрические двигатели, например вентильные двигатели переменного тока или двигатели постоянного тока.
Электрошкаф 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными, а также батареи 17 электропитания закреплены например, на платформах 8, 6, 7 соответственно на фиг.1. Платформы 8, 6, 7 для размещения электрошкафа 1 и батареи 17 электропитания устанавливаются в цепи механизма перемещения таким образом, чтобы дефектоскоп имел максимально равномерное распределение масс по всей длине витка цепи.
Комплект диагностических датчиков 2 расположен на кронштейне 3, крепящемся к одному из звеньев-платформ с возможностью регулировки величины зазора между поверхностью датчиков и внешней поверхностью неповоротной цилиндрической детали, например трубы. Крепление кронштейна 3 обеспечивает также возможность регулировки положения датчиков относительно образующей цилиндрической поверхности объекта контроля. Вариант сканера-дефектоскопа, представленный на фиг.1, 2, 3, предусматривает установку кронштейна 3 с датчиками 2 на платформе 4, которая соединяет смежные звенья 1, 5 в цепи механизма перемещения.
Для обеспечения замыкания цепи механизма перемещения и с целью сохранения работоспособности сканера-дефектоскопа при колебаниях диаметра неповоротных цилиндрических поверхностей объекта контроля в пределах одного типоразмера (например, для трубопроводов большого диаметра в пределах ±50 мм) конструкция цепи механизма перемещения оснащена упругой связью. Для этого звено-платформа 6 оснащено штангой 18, на которой установлены фиксирующая втулка 19, пружина 20 и две центрирующих пружину втулки 21, а также регулирующая гайка 22 с маховиком. Смежное со звеном-платформой 6 звено-платформа 6′ при этом оснащено ложементом 23, внутренняя поверхность которого сопряжена со штангой 18, а внешняя - с фиксирующей втулкой 19.
В комплект диагностических датчиков 2 могут входить по отдельности и одновременно: намагничивающая система с датчиками измерения напряженности или индуктивности магнитных полей рассевания, вихретоковые и ЭМА преобразователи, видеокамеры и лазерные дальномеры и профилометры. С этой целью электрошкаф 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может быть оснащен электронными модулями обработки сигналов от датчиков измерения напряженности магнитного поля, от вихретоковых или ЭМА преобразователей, а также от видеокамеры или лазерного дальномера-профилометра.
На одной из звеньев-платформы могут быть установлены датчики определения координат местоположения сканера дефектоскопа и выявленных аномалий, а электрошкаф 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными может быть оснащен разъемом подключения и модулем обработки сигнала.
Работа устройства осуществляется следующим образом.
В транспортном положении цепь звеньев-платформ механизма перемещения разомкнута, а все навесные элементы конструкции сканера-дефектоскопа (комплект диагностических датчиков 2, закрепленных в кронштейне 3, электрошкаф 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными, датчики определения координат местоположения сканера дефектоскопа и выявленных аномалий, батареи 17 электропитания) упакованы в специализированной таре.
После извлечения цепи звеньев-платформ механизма перемещения из тары для транспортировки она устанавливается на специализированный трап (при необходимости диагностирования объектов контроля большого диаметра) и закатывается на неповоротный цилиндрический объект контроля. Цепь звеньев-платформ фиксируется на неповоротном объекте в положении, позволяющем легко удерживать ее от самопроизвольного съезда. Затем закрепленная в звене-платформе 6 штанга 18, на которой установлены фиксирующая втулка 19, пружина 20 и две центрирующих пружину втулки 21 и регулирующая гайка 22 с маховиком укладывается в ложемент 23 звена-платформы 6′ и фиксируется втулкой 19. После этого с помощью регулирующей гайки 22 звенья-платформы стягиваются. При этом должен отсутствовать зазор между поверхностью неповоротной цилиндрической детали и всеми роликами или колесами 10 цепи звеньев-платформ.
Затем извлекаются из тары и крепятся на своих посадочных местах навесные элементы конструкции дефектоскопа: электрошкаф 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными, комплект диагностических датчиков 2, закрепленных в кронштейне 3, батареи 17 электропитания, датчики определения координат местоположения сканера дефектоскопа и выявленных аномалий с одновременной коммутацией электрических цепей сканера-дефектоскопа.
Следующей операцией является регулировка положения комплекта датчиков относительно поверхности объекта контроля и проверка после включения электрошкафа 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными работоспособности сканера-дефектоскопа с помощью стандартных образцов предприятия.
После выполнения описанных выше операций сканер дефектоскоп готов к работе.
В процессе работы электропитание осуществляется от батарей 17 электропитания, закрепленных на платформах 6 и 7 (как показано на фиг.1) стяжками, которые позволяют быстро заменить батареи 17. Модули электрошкафа 1 блока контрольно-измерительной аппаратуры, дистанционного управления и обмена данными выполняют следующие функции: устанавливают и поддерживают радиосвязь (например, Wi-Fi) с компьютером оператора, включают электропитание двигателей 15, а также управляют скоростью и направлением реверсивного движения сканера дефектоскопа, получают и обрабатывают сигналы от комплекта диагностических датчиков и датчика определения координат местоположения сканера-дефектоскопа и выявленных аномалий и передают полученную информацию на компьютер оператора. При необходимости модули электрошкафа 1 генерируют управляющие и зондирующие сигналы.
Приводимая в движение двигателями 15 цепь звеньев-платформ перемещается по винтовой линии с линейкой комплекта датчиков. Длина линейки датчиков превышает величину шага винтовой траектории движения цепи звеньев-платформ, что обеспечивает сплошной сканирующий контроль 100% стенки неповоротной цилиндрической оболочки.
При этом использование датчиков магнитного и вихретокового контроля позволяет обеспечить выявление поверхностных и подповерхностных дефектов, в частности наиболее опасных - трещин различной глубины и протяженности, а также измерять физические свойства материала объекта контроля. ЭМА преобразователи позволяют определять толщину цилиндрической оболочки и выявлять внутренние дефекты различной формы и ориентации. Видеокамера и лазерные дальномер или профилометр обеспечивают контроль состояния внешней поверхности неповоротной цилиндрической оболочки.
Переданная на компьютер оператора по каналу Wi-Fi информация от диагностических датчиков 2 и датчика определения координат местоположения сканера дефектоскопа и выявленных аномалий обрабатывается по специальной программе и в виде развертки цилиндрической оболочки выводится на экран монитора. Обнаруженные дефекты могут отмечаться цветными метками или сигналами-откликами от дефектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения неразрушающего контроля цилиндрических объектов и автоматизированный комплекс для его реализации | 2020 |
|
RU2764607C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 2005 |
|
RU2295721C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Способ автоматизированного неразрушающего контроля поверхностных дефектов объектов и устройство для его реализации | 2024 |
|
RU2832205C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ КОЛЬЦЕВЫХ ШВОВ | 1991 |
|
RU2047174C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| Способ внутритрубной диагностики и устройство для его осуществления (варианты) | 2021 |
|
RU2766370C1 |
Изобретение относится к области неразрушающего контроля неповоротных цилиндрических деталей, в частности трубопроводов, и направлено на упрощение конструкции устройства, увеличение скорости сканирования при сохранении точности и надежности контроля, что обеспечивается за счет того, что устройство содержит блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными и механизм перемещения по винтовой траектории, обеспечивающий возможность изменения направления движения. При этом, согласно изобретению, механизм перемещения выполнен в виде цепи с опорными роликами или колесами, в которой одна пара смежных звеньев разнесена вдоль оси изделия цилиндрической формы, например трубы, и соединена посредством платформы с элементами крепления, расположенными на расстоянии, равном шагу винтовой траектории сканирования. Звенья цепи выполнены в виде платформ, соединенных между собой шпильками, с возможностью поворота звеньев относительно соединительных шпилек и изменения их количества в цепи. 10 з.п. ф-лы, 3 ил.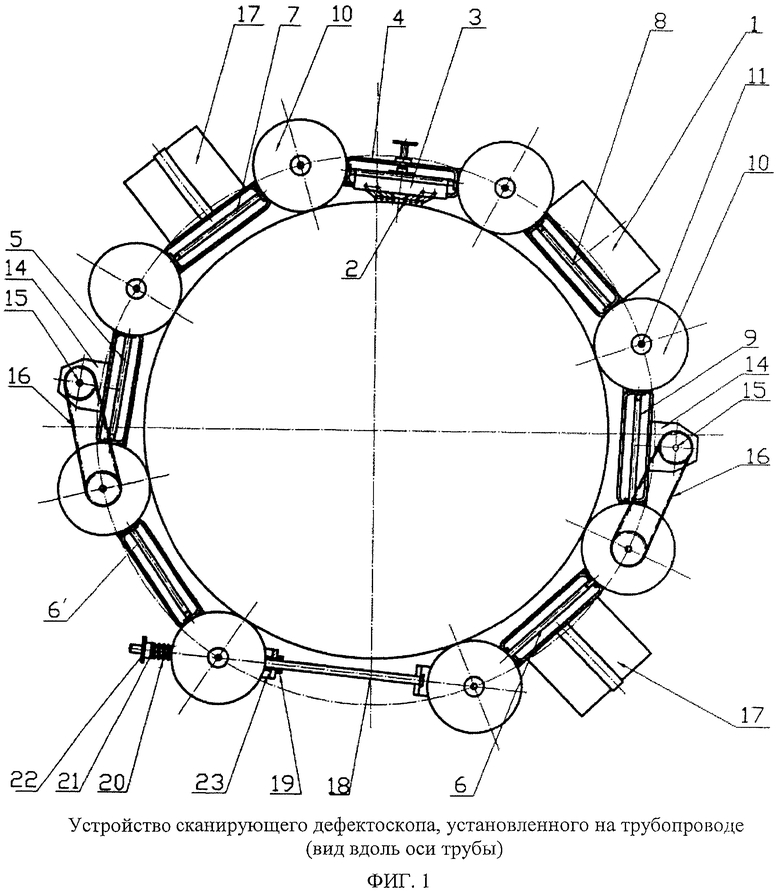
1. Устройство для сплошного сканирующего контроля качества изделий цилиндрической формы, содержащее блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными и механизм перемещения по винтовой траектории, обеспечивающий возможность изменения направления движения, отличающееся тем, что механизм перемещения выполнен в виде цепи с опорными роликами или колесами, в которой одна пара смежных звеньев разнесена вдоль оси изделия цилиндрической формы, например трубы, и соединена посредством платформы с элементами крепления, расположенными на расстоянии, равном шагу винтовой траектории сканирования.
2. Устройство по п.1, отличающееся тем, что звенья цепи выполнены в виде платформ, соединенных между собой шпильками, с возможностью поворота звеньев относительно соединительных шпилек и изменения их количества в цепи.
3. Устройство по п.2, отличающееся тем, что соединительные шпильки установлены в соединяемых звеньях с помощью подшипников.
4. Устройство по п.3, отличающееся тем, что платформы оснащены одной парой опорных роликов или колес каждая, причем на отдельных платформах, а с помощью кронштейнов смонтированы двигатели, вращение от которых передается на оси опорных роликов с помощью цепной передачи.
5. Устройство по п.1, отличающееся тем, что блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными включает в себя электрошкаф, установленный на одной из платформ, комплект диагностических датчиков, смонтированных с помощью кронштейнов на одной из платформ с возможностью регулировки расстояния от поверхности датчиков до поверхности трубы и регулировки их положения относительно образующей поверхности трубы, батареи электропитания, закрепленной на свободной платформе стяжками, и пульт дистанционного управления.
6. Устройство по п.5, отличающееся тем, что блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными включает в себя систему намагничивания и датчики измерения напряженности или индукции магнитного поля рассеивания.
7. Устройство по п.5, отличающееся тем, что блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными включает в себя вихретоковые датчики для обнаружения несплошностей и измерения удельного сопротивления металла.
8. Устройство по п.5, отличающееся тем, что блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными включает в себя электромагнитоакустические преобразователи.
9. Устройство по п.5, отличающееся тем, что блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными включает в себя видеокамеры.
10. Устройство по п.5, отличающееся тем, что блок контрольно-измерительной аппаратуры, дистанционного управления и обмена данными включает в себя датчики определения координат местоположения сканера-дефектоскопа и выявленных аномалий.
11. Устройство по п.4, отличающееся тем, что в качестве двигателей применены двигатели внутреннего сгорания, например двухтактные или электрические двигатели, например вентильные двигатели переменного тока или двигатели постоянного тока.
| Фронтальный режущий аппарат для косилок | 1938 |
|
SU55141A1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 2005 |
|
RU2295721C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДОВ | 0 |
|
SU399780A1 |
| Магнитный дефектоскоп | 1983 |
|
SU1161859A1 |
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ ПОМПАЖА КОМПРЕССОРА (ВАРИАНТЫ) | 2015 |
|
RU2700806C2 |

