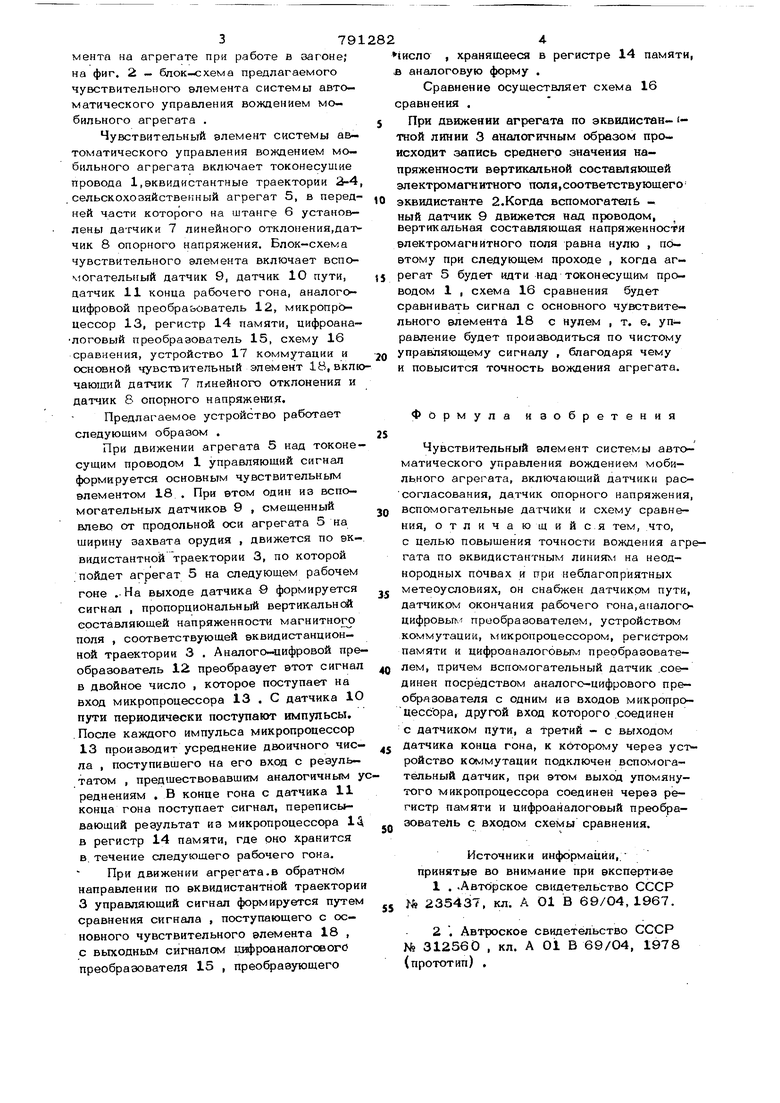
Изобретение относится к сельскохозяйственному машиностроению , в частности к системам автоматического управления вождением сельскохозяйственных агре гатов при выполнении технологического процесса . Известно устройство для измерения траектории самоходной машины, содержащее опорный токонесущий провод, рамкидатчики с соответствующими линейными / усилителйми и амплитудно-фазовый детектор 1. Известен также чувствительный элемент систеяиы автоматического управления вождением мобильного агрегата, включающий датчики рассогласования, датчик опорного напряжения, вспомогательные датчики и схему сравнения 2. Обишм недостатком известных устройств является низкая точность вождения агре- гата в специфических условиях сельскохозяйственных работ - на неоднородных по физическим свойствам почвах и при неблагоприятных метеорологических условия , Цель изобретения - повышнеиие точности вождения агрегата по эквидистантным линиям на неоднородных почвах при неблагоприятных метеоусловиях . Достигается это снабжением чувствительного элемента датчиком пути , датчиком окончания рабочего гона , аналогоцифровым преобразователем , устройством коммутации , микропроцессором , регистром памяти и цифроаналоговым преобразователем , причем вспомогательный датчик соединен посредством аналого-цифрового преобразователя с одним из входов микропроцессора , другой вход которого соединен с датчиком пути , а третий с выходом датчика конца гона , к которое му через устройство коммутации подключен вспомогательный датчик , при етом выход упомянутого микропроцессора соединен через регистр памяти и цифроаналоговый преобразователь с -входом схемы сравнения. На фиг. 1 изображена схема расположения датчиков чувствительного 9лемента на агрегате при работе в загоне; на фиг. 2 - бпок- :хема предлагаемого чувствительного элемента системы автоматического управления вождением мобильного агрегата . Чувствительный элемент системы автоматического управления вождением мобильного агрегата включает токонесущие провода 1, эквидистантные траектории 3-4 .сельскохозяйственный агрегат 5, в передней части которого на штанге 6 установлены датчики 7 линейного отклонения,дат чик 8 опорного напряжения. Блок-схема чувствительного элемента включает вспомогательный датчик 9, датчик 10 пути, датчик 11 конца рабочего гона, аналогоцифровой преобразователь 12, микропроцессор 13, регистр 14 памяти, цифроана- логовый преобразователь 15, схему 16 сравнения, устройство 17 коммутации и основной чувствительный элемент 18, вкпю чаю1яий датчик 7 плнейного отклонения и датчик 8 опорного напряжения. Предлагаемое устройство работает следующим образом . При движении агрегата 5 над токонесущим проводом 1 управляющий сигнал формируется основным чувствительным элементом 18 . При этом один из вспомогательных датчиков 9 , смешенный влево от продольной оси агрегата 5 на щирину захвата орудия , движется по эквидистантной траектории 3, по которой .пойдет агрегат 5 на следующем рабочем гоне . На выходе датчика 9 формируется сигнал , пропорциональный вертикальней составляющей напряженности магнитного поля , соответствующей эквидистанцион- ной траектории 3 . Аналого-цифровой пре образователь 12 преобразует этот сигнал в двойное число , которое поступает на вход микропроцессора 13 . С датчика 10 пути периодически поступают импульсы. . После каждого импульса микропроцессор 13 производит усреднение двоичного числа , поступившего на его вход с результатом , предшествовавшим аналогичным у реднениям . В конце гона с датчика 11 конца гона поступает сигнал, переписывающий результат из микропроцессора 1Д в регистр 14 памяти, где оно хранится в, течение следующего рабочего гона. При движении агрегата.в обратном направлении по эквидистантной траектори 3 управляющий сигнал формируется путем сравнения сигнала , поступающего с основного чувствительного элемента 18 , с выходным сигналом цифроаналогового преобразователя 15 , преобразующего исло , хранящееся в регистре 14 памяти, аналоговую форму . Сравнение осуществляет схема 16 равнения . При движении агрегата по эквидистан- iной линии 3 аналогичным образом просходит запись среднего значения наряженности вертикальной составляющей лектромагнитного пол я, соответствующего квидистанте 2.Когда вспомогатеяЬ ый датчик 9 движется над проводом, ертикальная составляющая напряженнос-ри лектромагнитного поля равна нулю , поэтому при следующем проходе , когда агегат 5 будет идти над токонесущим проводом 1 , схема 16 сравнения будет равнивать сигнал с основного чувствитеьного элемента 18 с нулем , т. е. управление будет производиться по чистому правляющему сигналу , благодаря чему и повысится точность вождения агрегата. Формула изобретения Чувствительный элемент системы автоматического управления вождением мобильного агрегата, включающий датчики рас- согласования, датчик опорного напряжения, вспомогательные датчики и схему сравнения, отличающийся тем, что, о целью повыщения точности вождения агрегата по эквидистантным линиям на неоднородных почвах и при неблагоприятных метеоусловиях, он снабжен датчиком пути, датчиком окончания рабочего гона,аналого цифровьт преобразователем, устройством коммутации, микропроцессором, регистром памяти и цифроаналоговым преобразователем, причем вспомогательный датчик .соединен посредством аналого-цифрового преобразователя с однкм из входов микропро- цессора, другой вход которого .соединен с датчиком пути, а третий - с выходом датчика конца гона, к которому через усгройство коммутации подключен вспомогательный датчик, при этом выход упомянутого микропроцессора соединен через регистр памяти и цифроаналоговый преобразователь с входом схемы сравнения. Источники информации, принятые во внимание при эксперти-ве 1. .Авторское свидетельство СССР № 235437, кл. А 01 В 69/04,1967. 2. Автроское свидетельство СССР NO 312560 , кл. А Oi В 69/04, 1978 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Электроиндукционная система местоопределения самоходных машин | 2024 |
|
RU2831279C1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| АВТОНОМНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1992 |
|
RU2110078C1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| Устройство для автоматическогоВОждЕНия СЕльСКОХОзяйСТВЕННыХАгРЕгАТОВ | 1979 |
|
SU843802A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА НА ВЫХОДЕ ИЗ СОПЛА | 1990 |
|
RU2047119C1 |
| Устройство для измерения дальности до управляемого машинно-тракторного агрегата | 1984 |
|
SU1279549A1 |
13
П
10
17
If
/«
JS
r
