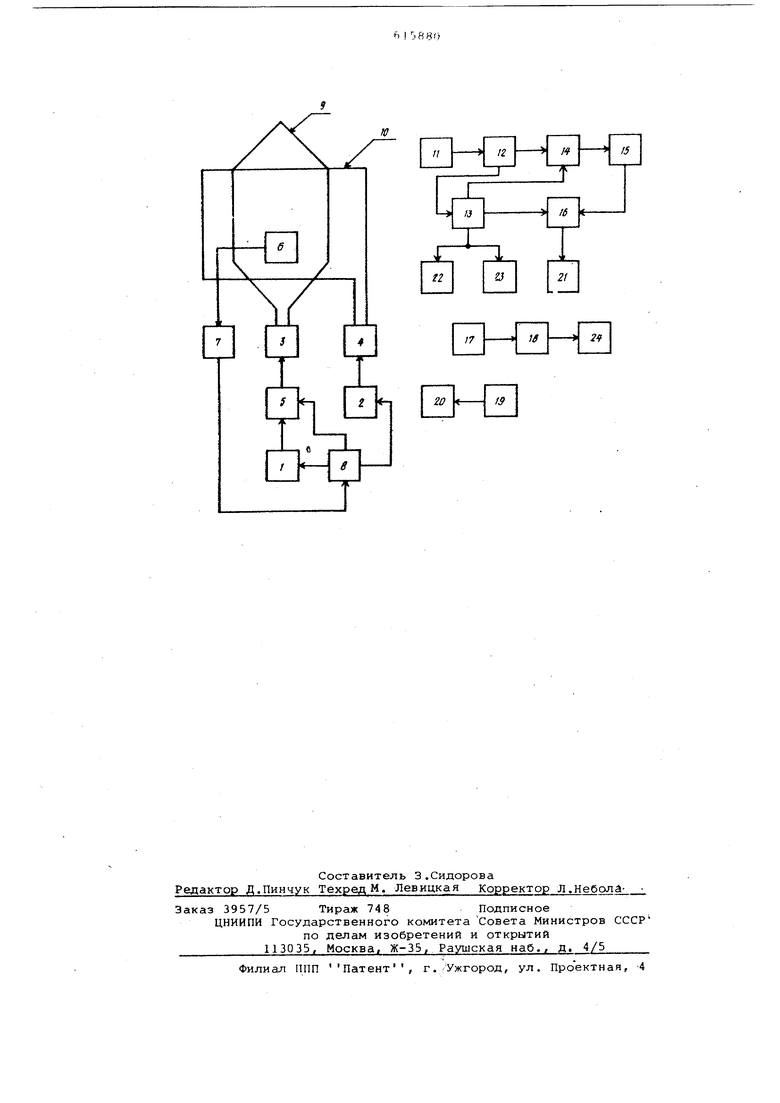
тенны 20, установленной на агрегате;. Этот сигнал усиливается усилителем 7 и поступает на программный регистр 8 который устанавливает коэффициент пе редачи управляемого-делителя 5,.задавая тем caNifcJM через усилитель мощности 3 величину тока в проводе 9, соответствующую первой эквидистантной траектории. Сигнал, принимаемый индукционным датчиком 17 от токонесущего провода 10, определяющего границу поворотной полосы, усиливается усилителем 18 и включает преобразующе-усилительный элемент 24 для подъема рабочего орудия. Таким образом, на поворотной по лосе самоходный агрегат будет двигаться с поднятым рабочим орудием. При выходе самоходного агрегата с по воротной полосы на гон сигйеш индукционного датчика 17, принятый от токонесущего провода 10, уменьшается и выключает преобразующе-усилительный элемент 24. Вследствие этого рабочее орудие опускается и самоходный агрегат продолжает движение на гоне с опущенным рабочим орудием. При выходе самоходного агрегата с гона на поворотную полосу сигнал на индукционном датчике 17 возрастает, что вызывает включение преобразующеусилительного элемента 24 сервопривода подъема рабочего орудия. Пройдя поворотную полосу с поднятым орудием, самоходный агрегат внов выходит на гон, где происходит опускание рабочего орудия. Завершая проход по первой эквидистантной траектории движения, самоходный агрегат на поворотной полосе проходит над приемной антенной 6. При этом сигнал передающей антенны 20 принимается ан тенной 6 и через усилитель 7 поступает на программный регистр. Програм мный регистр 8 изменяет коэффициент передачи управляемого делителя 5, чт приводит к изменению величины тока в проводе 9. Тем самым задается следую щая эквидистантная траектория движения самоходного агрегата. При прохождении последующих эквидистантных траекторий движения работа всего устройства аналогична работе в том случае, когда агрегат проходит первую эквидистантную траекто рию движения. После прохода последней эквидистантной траектории программный регистр 8 выдает команду на выключение генераторов 1 и 2. В результате этого происходит исчезновение электромагнитных полей токонесущих проводов 9, 10. При этом отсутствие сигнала на выходе усилителя опорного напряжений 13 приводит к выключению преобразую-i ще-усилительных элементов 22, 23 сервоприводов механизмов для управления муфтой сцепления и газом, и самоходный агрегат останавливается. Изобретение позволяет повысить эксплуатационную надежность устройства, так как программное устройство располаггиот на неподвижном пункте управ ления, тем самым устраняя воздействий вибраций на его элементы. Формула изобретения Устройство для автоматического на1правления движения самоходных агрега тов, содержащее генератор переменного тока гона, токонесущие провода,.чувствительный элемент эквидистантной траектории движения, программный состоящий из чувствительного элемента и программного регистра, соединенного с управляемым делителем, и преобразующие усилительные элементы сервоприводов исполнительных механизмов самоходного агрегата, отличающееся тем, что, с целью повышения эксплуатационной надежности устройства, управляемой делитель подключен к выходу генератора переменного тока гона. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР I 323087, кл. А 01 В 69/04, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Устройство для автоматического управления движением самоходного агрегата | 1979 |
|
SU767710A1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ АГРЕГАТОВ | 1973 |
|
SU399219A1 |
| Чувствительный элемент системы автоматического управления вождением мобильного агрегата | 1977 |
|
SU791282A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ | 1971 |
|
SU322142A1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |