(54) МАНИПУЛЯТОР ДЛЯ ИЗВЛЕЧЕНИЯ ОТЛИВОК ИЗ ПРЕСС-ФОРМЫ МАШИНЫ ЛИТЬЯ ПОД ДАВЛЕНИЕМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для извлечения отливок из пресс-форм литья под давлением | 1978 |
|
SU876278A1 |
| Манипулятор для извлечения отливок | 1985 |
|
SU1308426A1 |
| Устройство для удаления заготовок | 1977 |
|
SU737117A1 |
| ПРЕСС-ФОРМА ДЛЯ ПОЛУЧЕНИЯ ОТЛИВОК | 1998 |
|
RU2136441C1 |
| Устройство для удаления отливок из машины для литья под давлением | 1971 |
|
SU455519A3 |
| Металлическая форма для получения отливок | 1982 |
|
SU1046010A1 |
| Устройство для извлечения отливок из постоянных литейных форм | 1974 |
|
SU506467A1 |
| Кокильный карусельный комплекс | 1990 |
|
SU1720791A1 |
| Пресс-форма для литья под давлением | 1979 |
|
SU910346A1 |
| Установка для литья под низким давлением | 1976 |
|
SU577087A1 |
1
Изобретение относится к литейному производству, в частности к литью под давлением.
Известен манипулятор для извлечения отливок из пресс-формы машины литья под давлением, содержащий механическую руку с захватом, установленную в поворотном корпусе, механизм перемещения руки в направлении, перпендикулярном ее оси. Это движение используется для сопровождения отливки при ее выталкивании. На случай рассогласования движений выталкивателей и манипулятора в нем предусмотрено специальное предохранительное устройство 1.
Наличие такого дополнительного движения значительно усложняет конструкцию манипулятора. В результате частичной рассогласованности движений манипулятора и выталкивателей мащины, усилия последних частично нагружают элементы манипулятора, в частности направляющие, снижая их долговечность.
Известен также манипулятор, содержащий механическую руку, установленную в корпусе с возможностью перемещения вдоль своей оси и поворота относительно вертикальной оси, механизм захвата, корпус которого установлен на механической руке с возможностью поворота вокруг оси, параллельной оси поворота руки, механизм фикса ции захвата 2.
При наличии такой кинематической схемы, синхронный с выталкивателями мащины съем отливки может быть осуществлен путем совмещения трех движений манипулятора. Для этого манипулятор снабжается достаточно сложной контурной системой управления, что значительно удорожает манипулятор и усложняет его эксплуатацию.
Цель изобретения - упрощение конструкции и повыщение надежности извлечения отливок.
Это достигается тем, что манипулятор
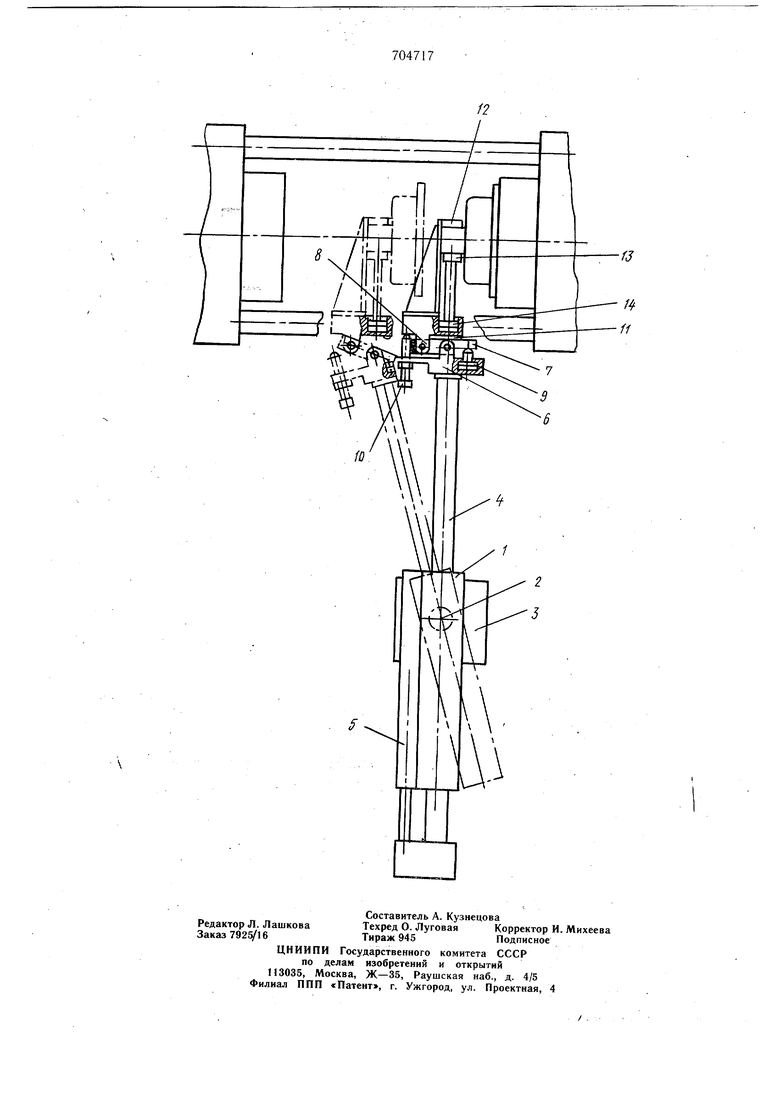
5 снабжен двуплечим рычагом, щарнирно закрепленным на механической руке и одним плечом соединенным щарнирно с корпусом механизма захвата, а механизм фиксации выполнен в виде гидроцилиндра, закрепленного на механической руке и взаимодейст0вующего своим щтоком с другим плечом двуплечего рычага, и двух упоров, один из которых установлен между механической рукой и корпусом механизма захвата, а другой - между двуплечим рычагом и упомянутым корпусом. При этом упор, установленный между механической рукой и корпусом механизма захвата, выполнен регулируемым. На чертеже схематично изображен манипулятор. Он имеет корпус 1, установленный на оси 2 и снабженный. приводом 3 поворота вокруг оси 2. Подвижно относительно корпуса 1 смонтирована рука 4 с приводом 5 поступательного перемещения вдоль оси руки. К фланцу 6 руки 4 шарнирно закреплен двуплечий рычаг 7, на одном плече которого шарнирно закреплен корпус 8 механизма захвата, а другой - взаимодействует со штоком гидроцилиндра 9, установленного на фланце 6. Корпус 8 также выполнен в виде двуплечего рычага, одно плечо которого взаимодействует с регулируемым упором 10, установленным на фланце 6, а другое - несет упор 11, взаимодействующий с рычагом 7. На корпусе 8 смонтированы две зажимные губки: неподвижная 12 и подвижная 13, связанная с приводным гидроцилиндром 14. Манипулятор работает следующим образом. Исходное положение звеньев манипулятора: корпус I повернут захватом к машине литья под давлением, корпус 8 с помощью гидроцилиндра 9 зафиксирован между двумя упорами 10 и II, губки 12 и 13 раскрыты. После поступления сигнала из машины о раскрытии формы рука 4 с помощью привода 5 перемещается в разъем формы рядом с отливкой, а затем некоторым поворотом корпуса 1 вокруг оси 2 губки 12 и 13.заводятся в положение захвата отливки. Далее с помощью гидроцилиндра 14 губки 12 и 13 зажи.мают отливку, гидроцилиндр 9 освобождает корпус 8, а привод 3 переводится в режим компенсации, не препятствующий повороту корпуса 1 под действием внещних сил. Подается сигнал в мащину «Выталкивание отливки. При выталкивании отливки из70менение ее положения относительно неподвижных частей манипулятора компенсируется поворотом его звеньев вокруг оси 2 и в щарнирах рычага 7. Изобретение позволяет значительно упростить систему управления и повысить эксплуатационную надежность манипулятора. Формула изобретения 1.Манипулятор для извлечения отливок из пресс-формы мащины литья под давлением, содержащий механическую руку, установленную в корпусе с возможностью перемещения вдоль своей оси и поворота вокруг вертикальной оси, механизм захвата, корпус которого закреплен на механической руке с возможностью поворота вокруг оси, параллельной оси поворота механической руки, механизм фиксации, отличающийся тем, что, с целью упрощения конструкции и повышения надежности извлечения отливок из прессформы, он снабжен двуплечим рычагом, шарнирно закрепленным на механической руке и одним плечом соединенным шарнирно с корпусом механизма захвата, а механизм фиксации выполнен в виде гидроцилиндра, закрепленного на механической руке и взаимодействующего своим штоком с другим плечом двуплечего рычага, и двух упоров, один из которых установлен между механической рукой и корпусом механизма захвата, а другой - между двуплечим рычагом и упомянутым корпусом. 2.Манипулятор по п. 1, отличающийся тем, что упор, установленный междумеханической рукой и корпусом механизма захвата, выполнен регулируемым. Источники информации, принятые во внимание при экспертизе 1.Патент США № 366894, кл. 214/ICM, опублик. 1972. 2.Патент Японии № 51-7900, кл. 11 В, опублик. 1976 (прототип).
