внутренние губки 9, Встречное движение губок 12 и 9 обеспечивает фиксацию деталей. При обратном перемещении тяги 17 пружины 11 перемещают губки 12 в обратном направлении. Дпя
1
Изобретение относится к конструкции схватов промьшленных роботов и манипуляторов и может быть использовано для автоматизации сборочно-сва- рочных работ в робототехнических комплексах, например, при сварке ко- робчатьщ сечений.
Цель изобретения - обеспечение фиксации .собираемых деталей при перемещении и расширение технологических возможностей.
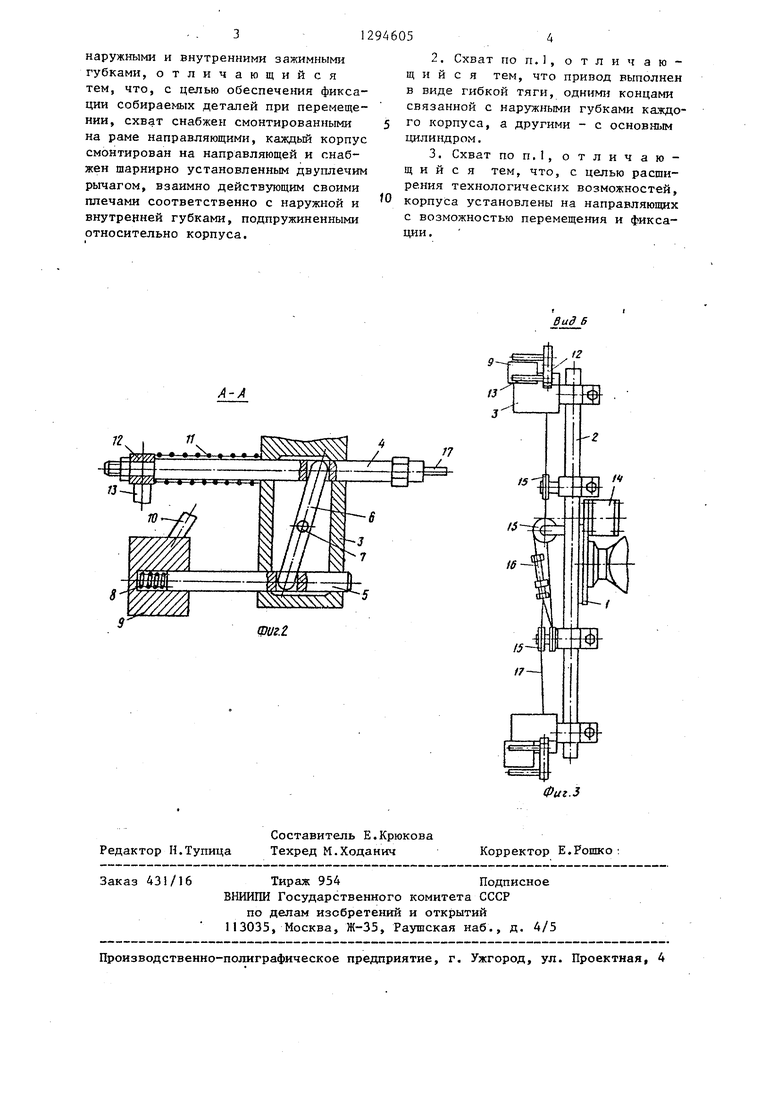
На фиг.1 изображен предлагаемый схват промьшленного робота; на фиг.2 разрез А-А на фиг.1; на фиг.3 - вид Б на фиг.1.
Схват манипулятора содержит раму 1, на направляющих элементах 2 которого установлены четыре корпуса 3 по углам изделия. Б каждом корпусе 3 смонтированы приводные 4 и ведомые 5 звенья, кинематически связанные между собой посредством двуплечего рычага 6, установленного с возможностью поворота вокруг оси 7 корпуса 3 Концы рычага 6 связаны с приводными 4 и ведомыми 5 звеньями. На ведомом звене 5 через упругие элементы 8 установлены внутренние губки 9, вьтол- ненные в виде подпружиненных токопод водящих подкладок с закрепленными на них токоподводящими кабелями 10. На приводных звеньях 4 установлены упругие элементы, например возвратные пружины 11, и наружные губки 12, выполненные в виде вилки, пальцы 13 которой охватывают внутренние губки 9.
На раме 1 расположен также привод, вьшолненный в виде трособлочной передачи и состоящий из пневмоци- .линдра 14, блоков 15, переходника 16, осуществляющего функции регулировочного натяжения тросов 17, концы которых соединены с приводными звеньями 4.
«
перехода на сборку другого типоразмера корпуса 3 перемещают по направляющим 2, а направляющие 2 - по раме 1 . 2 3.п. ф-лы, 3 ил.
fO
t5
20
25
30
35
40
45
Схват манипулятора работает следующим образом.
При срабатывании пневмоцилиндра 14 тянущее усилие на штоке через переходник 16 и трособлочную передачу равномерно распределяется на приводные звенья 4.
При втягивании приводных звеньев 4 ,сжимаются возвратные пружины 11, наружные губки 12 обжимают свариваемые кромки изделия, тем самым устраняется зазор между кромками. При этом посредством рычага 6, вращающегося на оси 7,, перемещаются ведомые звенья 5. Закрепленные на них внутренние губки 9 через упругие элементы 8 поджимаются к свариваемому стыку с внутренней стороны изделия и осуп1ествляют его сборку.
После окончания технологического цикла отключают подачу воздуха в пневмоцилиндр 14. Под действием возвратных пружин 1I приводные звенья 4 перемещаются в обратном направлении и шток пневмоцилиндра 14 посредством трособлочной передачи возвращается в первоначальное (исходное) положение. При этом наружные 12 и внутренние 9 губки отводятся от изделия.
Дпя переналадки схвата на сборку другого типоразмера изделия корпуса 3 перемещают по направляющим элементам 2 рамы 1 или направляющие элементы 2 перемещают относительно рамы 1.
Конструкция схвата позволяет обеспечить фиксацию собираемых элементов при перемещенкм их под технологическое оборудование и расширяет технологические возможности.
Формула изобретения
1. Схват манипулятора, содержащий , корпуса с перемещающимися в них от привода навстречу друг другу
наружными и внутренними зажимными губками, отличающийся тем, что, с целью обеспечения фиксации собираемых деталей при перемещении, схват снабжен смонтированными на раме направляющими, каждый корпус смонтирован на направляющей и снабжен шарнирно установленным двуплечим рычагом, взаимно действующим своими плечами соответственно с наружной и внутренней губками, подпружиненными относительно корпуса.
94605
2 щ и и
fO
Схват по п.1, о т л и ч а ю - с я тем, что привод выполнен в виде гибкой тяги, одними концами связанной с наружными губками каждого корпуса, а другими - с основным цилиндром.
3. Схват ПОП.1, отличающийся тем, что, с целью расширения технологических возможностей, корпуса установлены на направляющих с возможностью перемещения и фиксации.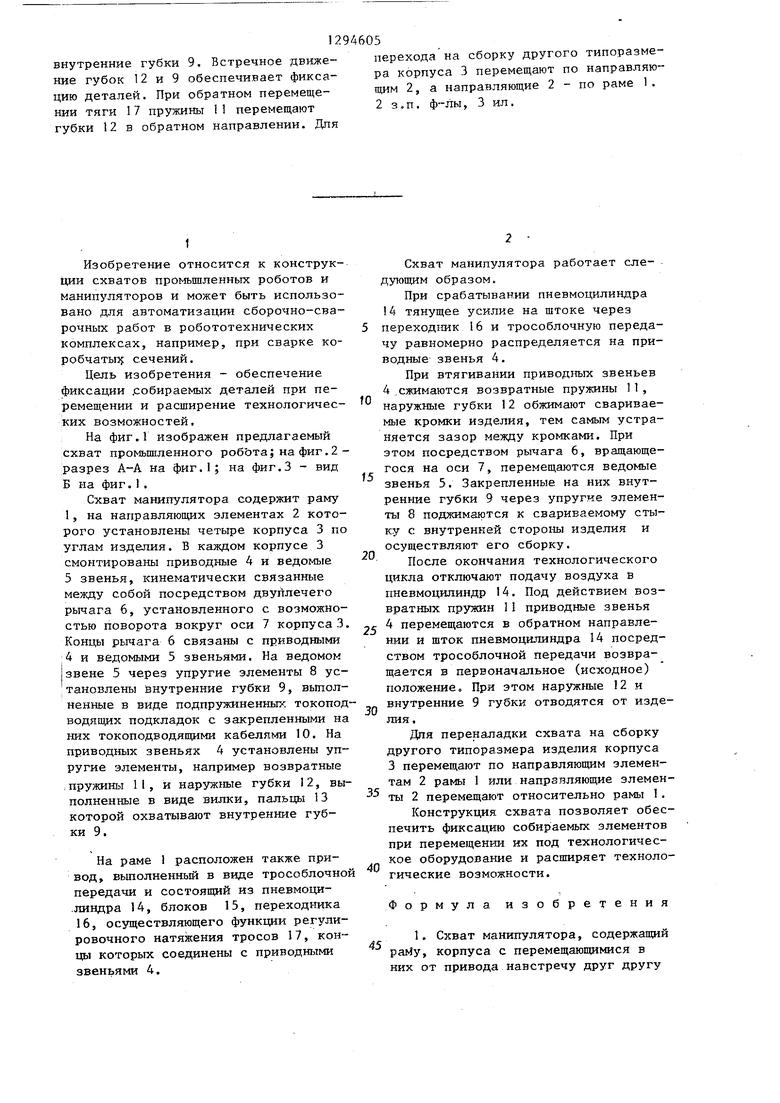
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
Изобратеппе относится к конст- РУКЦИ51М с :ватов промьпплеиных роботов н манипуляторов. Цель иэобретешш - обеспечение фиксации собираемых деталей при паремещегши и расширение технологических возможностей. Перемещение гибкой тяги 17 осуществляет иере- мещенме наружных.губок 12, которые через днунлечий рычаг перемещают tamA. к; со 42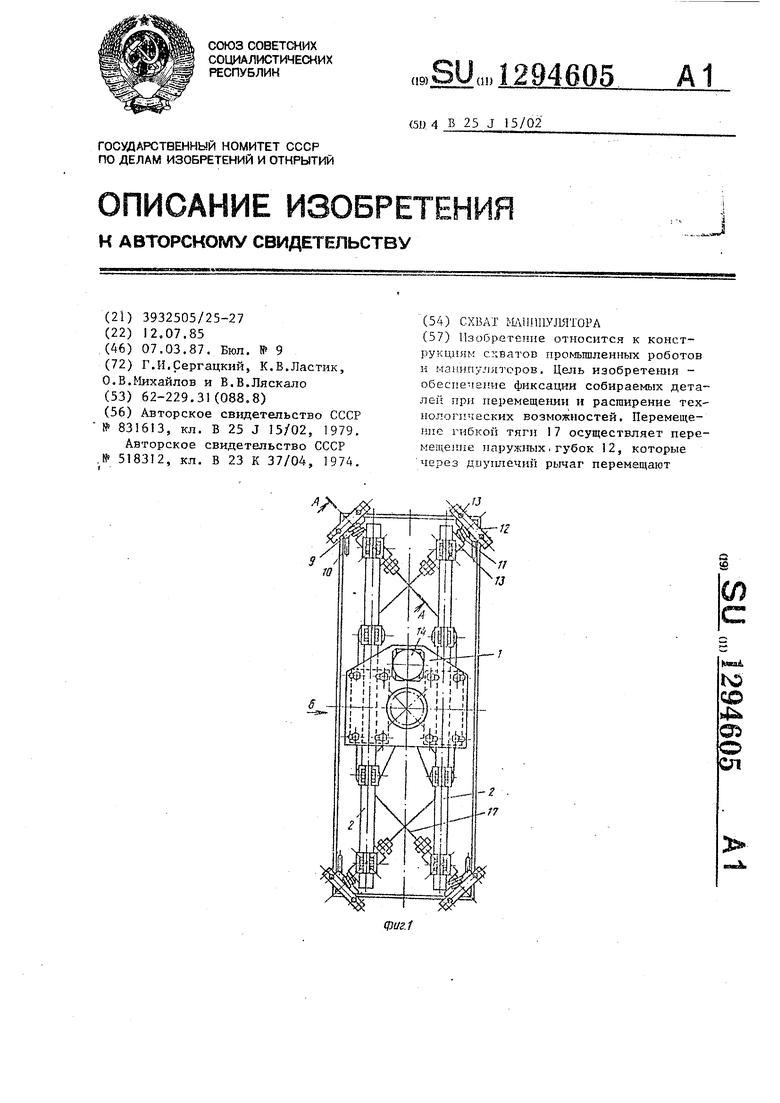
А11
шиг2
12
J7
Редактор Н.Тупица
Составитель Е.Крюкова Техред М.Ходанич
Заказ 431/16 Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е.Рошко
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Авторское свидетельство СССР ,№ 518312, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
