1
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов или манипуляторов.
Известно захватное устройство,содержащее привод, например,силовой цилиндр, захватные органы, каждый из которых снабжен тремя зажимными элементами, установленными в корпусе в выполненных по сходящимся осям направляющих, причем два зажимных элемента каждого захватного органа представляют собой г-образные рычаги, а третий - двухстороннюю рейку, которая через промежуточные шестерни связана с Г-образными рычагами , причем на ответных поверхностях Г-образных рычагов выполнен зубчатый венец l.
Наличие в конструкции механизма захвата пары идентичных захватных органов усложняет-конструкцию из-за наличия у каждого захватного органа автономного привода зажимных элементов , которые осложняют и практически делают невозможным синхронное срабатывание всех шести зажимных элеметов механизма захвата.
Цель изобретения - упрощение конструкции захватного устройства.
Для достижения поставленной цели оно снабжено смонтированной на штоке силового цилиндра дополнительной Шестерней, установленной между двухсторонними рейками каждого захватного органа, а рейки снабжены дополнительным зубчатым венцом, взаимодействующим с дополнительной шестерней.
0
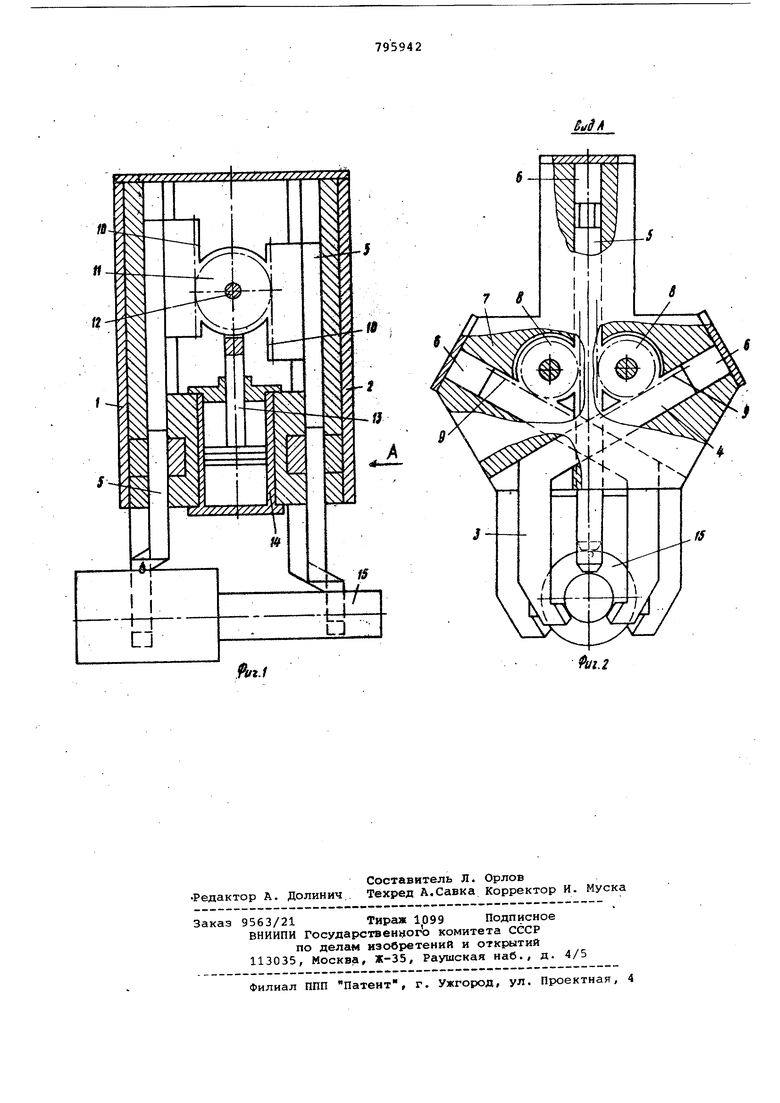
На фиг.1 изобра ::ен общий вид предлагаемого захватного устройства, разрез на фиг.2 - вид А на фиг.1.
Захватное устройство содержит пару идентичных захватных органов 1
5 и 2, каждый из которых снабжен тремя зажимными элементами 3,4 и 5. Зажимные элементы 3,4 и 5 установлены в направляквдих б, выполненнных по сходящимся осям в корпусе 7, причем
0 зажимные элементы 3 и 4 представляют собой Г-образные рейки, а зажимные элементы 5 - двухсторонние зубчатые рейки, которые через промежуточные шестерни 8 в каждом захватном орга5не 1 и 2 кинематически связаны с Г-образными рейками , на ответных поверхностях которых имеется зубчг-.тая нарезка 9. Кроме того, на зажимных элемента:-: 5 выполнена дополнительная зубчатая нарезка 10. Дополнительной зубчатой нарезкой 10 зажимные элекгенты 5 кинематически связаны между собой через шестерню 11. Шестерня 11 установлена посредством оси 12 на подвижных частях 13 привода 14, выполн ннЬ.го например, в виде силового цилиндра, подвижные части 13 которого имеют возможность перемещаться вдоль дополнительных зубчатых нарезок.10 на зажимных элементах 5.
Захватное устройство работает следующим образе..
Одну из полостей силового 1шлйндра привода 14 сообщают с исто ником сжатого воздуха. При этом подвижные части 13- вместе с шестерней 11 neper мещаются вдоль дополнительных зубчат нарезок 10 на зажимных элементах 5. Шестерня 11 при этом не вращается и сооСйцает поступательное перемещение через дополнительные зубчатые нарезки 10 зажимным элементам 5,. каяузый иЭ которых при перемещений своей двухсторонней зубчатой на экой поворачивает промежуточные шестерни 8. Промежуточна шестерни S, поворачЕшаясь, сообщают поступательное перемещение зажимньал элементам 3 и 4 через зубчатую нарезку 9 на статных поверхностях Г-образных реек. Таким образом, зажимные эле «вйты 3,4 и Б захватных органов 1 и 2 перёг «ещаются в направляющих 6 корпуса 1 по прямым с одинаковой линейной скосростью. При контакте зажимных элементов 3,4 к 5 захватного органа 1 с поверхностью захватываемого объекта 15, зажимные элементы останавливаются и производят предварительный зажим захватываемого объекта 15 в зоне своего действия (стерня 11 при этом,кроме линейного перемещения с подвижньгми частями 13 привода 14, начинает вращаться вокруг ОСИ 12 и сообщает ускоренное поступательное перемещение зажимшэ
элементам 3, 4 и 5 захватного органа 2, который производит зажим захватываемого объекта 15 по другой поверхности. В результате силового замыкания происходит надежный окончательный зажим захватываемого объекта 15 в двух местах пр поверхностям неодинаковых размеров. Освобождение захваченного объекта 15 производится в обратной последовательности при сообщении соответствукяцйх полостей силового пневматического цилиндра привода 14 с источнике сжатого воздуха и атмосферой.
Формула изобретения
Устройство для захвата деталей, содержащее привод, например, силовой цилиндр, захватные органы, каждый из которых снабжен тремя зажимными элементами, установленными в корпус в выполненных по сходящимся осям направлянадих, причем два зажимных элемента каждого захватного органа представляют собой Г-образные рычаги, а третий - двухстороннкйо рейку, котора через промежуточные шестерни связана с Г-образ,ными рычагами, причем на ответньЕс поверхностях Г-образяш: рычагов .выполнен зу &чатый венец, о т л и ч а ю щ ё с я тем, что, с целью упрощений конструкции, оно снабжено емонтирсванной на штоке силового Ш1линдра дополнительной шестерней, установленной мея;ау двухсторонними рейками каждого захватного органа,,а рейки снабжены дополнительном зубчатым венцом, взаимодействующим с дополнительной июстерней. .
Источники информации, принятые во внимание при экспертизе
1, JiBTOpCKOe свидетельство СССР №632547, кл. В 23 Q 7/04, 1977.
г.(
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для переноса заготовок | 1979 |
|
SU812411A1 |
| Захватное устройство | 1984 |
|
SU1293019A1 |
| Самоцентрирующий патрон | 1981 |
|
SU952456A1 |
| Самоцентрирующий патрон | 1982 |
|
SU1052347A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Устройство для правки горячего проката растяжением | 1975 |
|
SU570428A1 |