г/
fS
сл
с
САЭ
Изобретение относится к робототех Йике и может быть использовано в промышленных роботах и манипуляторах применяемых для загрузки металлорежу его оборудования. .
Целью изобретения является расши- )ение технологических возможностей. j На фиг.1 п редставлено устройство, .общий вид; на фиг.2 - вид А на фиг.1 па фиг.З - разрез Б-Б на фиг.2; на )иг.4 - разрез В-В на фиг.З; на фиг.5 Iiaspes Г-Г на фиг.4,
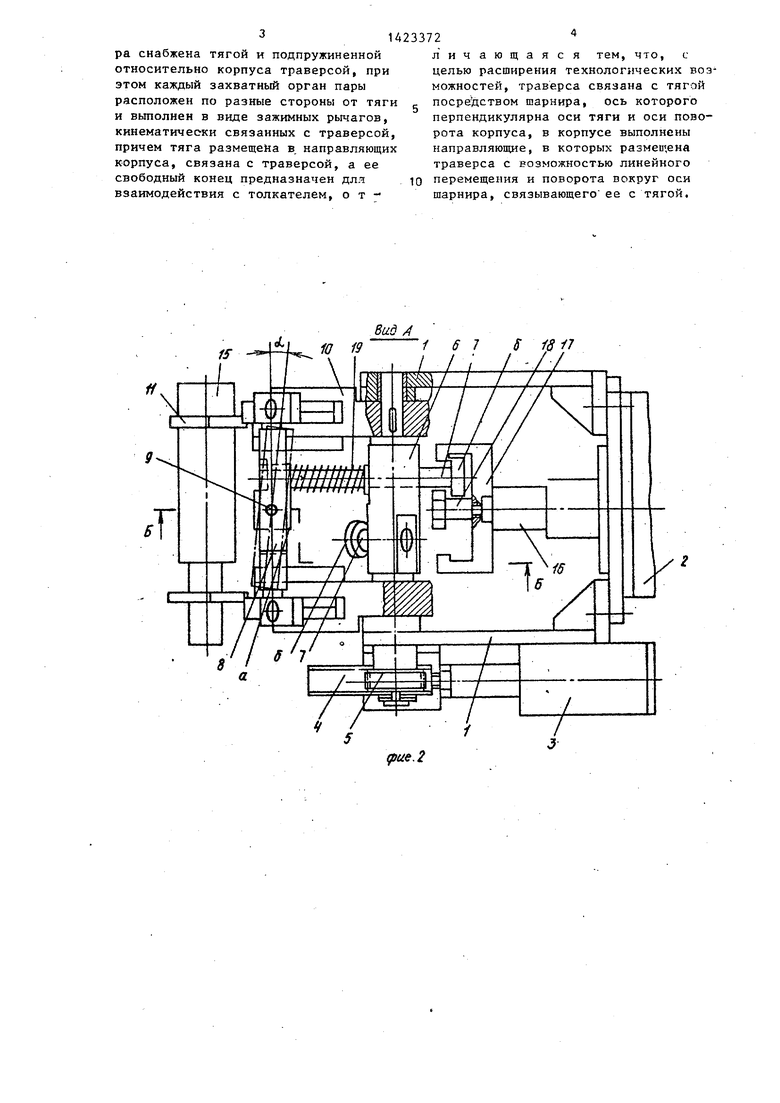
Кисть манипулятора включает пару параллельных щек 1, жестко связанных с основанием кисти 2 руки манипулятора, на котором установлен силовой ЦИЛИНДР 3. Шток силового цилиндра 3 соединен с рейкой 4, которая нахо- дится в зацеплении с шестерней 5, установленной на валу 6, имеющем возможность вращения и расположенном перпендикулярно оси руки манипулятора. Сквозь вал 6 перпендикулярно его продольной оси пропущены с возмож- нэстью возвратно-поступательного дви- ж гния две тяги 7, причем концы каждой ;и1 тЯг 7 имеют Г-образную форму и шарнирно связаны с соответствующими т)аверсами 8 , посредством осей 9. Друте концы тяг 7 имеют Т-образную форму. Вал 6 жестко связан с рычагами К), образуя поворотный корпус, на каждом из плеч рычагов корпуса установлены захватные органы, состоящие И51 двух пар зажимных рычагов 11, посаженных на оси 12 с возможностью поворота относительно друг друга. Зг жимные рычаги tt связаны с травёр- ссй 8 посредством пальцев 13 и суха- р4й 14, помещенных в гнезда приводных о онечностей зажимных рычагов 11 и и еющих возможность возвратно-посту- п тельного перемещения. В местах соп
ря|жения траверсы 8 и поворотного счет зазоров, которые дают возможО
5
0
5
0
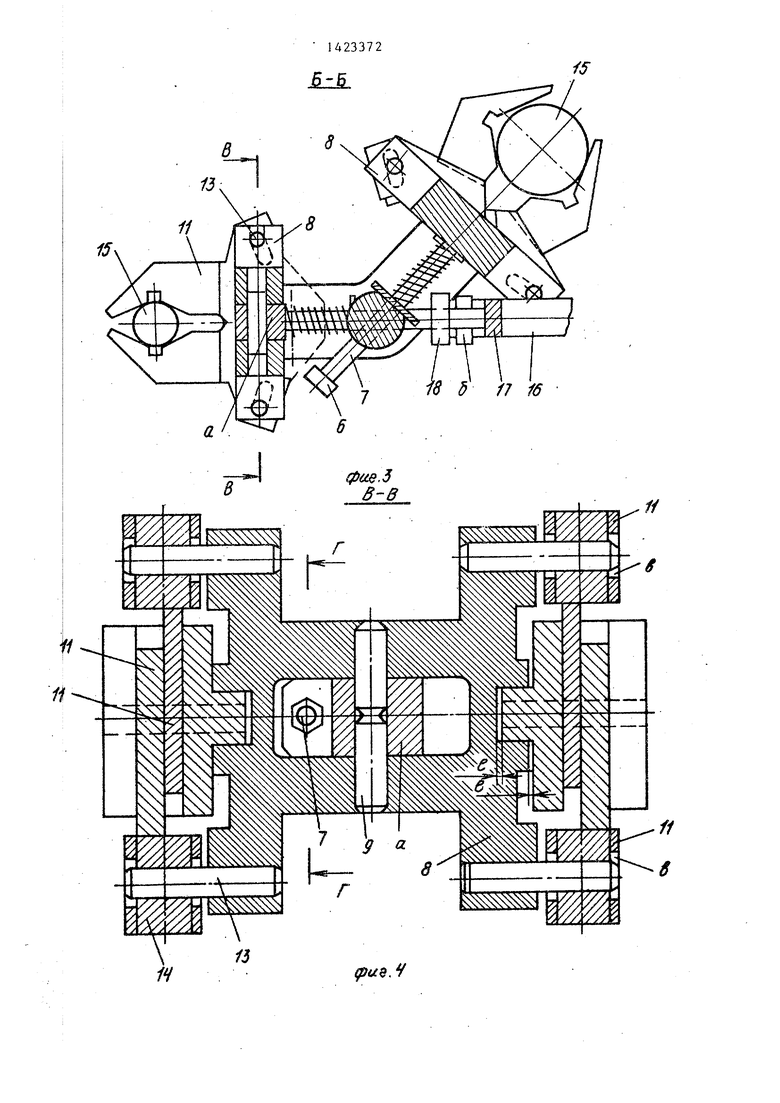
ния деталей 15 рычагами 11 н тягах 7 установлены упругие элементы 19, расположенные в интервале между Г-об- разными концами тяг и по,верхностью вала 6 поворотного корпуса.
При работе раскрытие зажимных рычагов 11 производится перемещением толкателя 16 в сторону- основания 2 кисти. При этом Т-образный конец 7 захватывается одним из мест, образованных С-образной скобой 17 и Т-образным стержнем 18. Тяга 7, перемещаясь перпендикулярно валу 6, своим Г-образным концом за ось 9 увлекает траверсу 8, которая, в свою очередь, пальцами 13 через ри 14 воздействует на приводные оконечности зажимных рычагов 11, и те разводятся, поворачиваясь на. осях 12. При разведении зажимных рычагов 11 упругий элемент 19 сжимается. Зажим детали осуществляется выдвижением толкателя 16. При этом упругий элемент 19 разжимается и перемещает тя ГУ 7 и связанную с ней траверсу 8, которая пальцами 13 через сухари 14 воздействует на приводные оконечности зажимных рычагов 11, и те, поворачиваясь на осях 12, сводятся, зшхи- мая деталь 15 усилием упругого зле мента 19.
Смена захватных органов осуществи ляется путем поворота поворотного корпуса при срабатывании силового .цилиндра 3, который рейкой 4 вращает вал 6 за шестерню 5. При этом деталь 15, зажатая, зажимными рычагами 11, перемещается в нерабочую позицию,осуществляются операции по раскрытию- закрытию второй пары захватных органов. I - .
Возможность захвата деталей ступенчатой конфигурации достигается за
З счет зазоров, которые дают возмож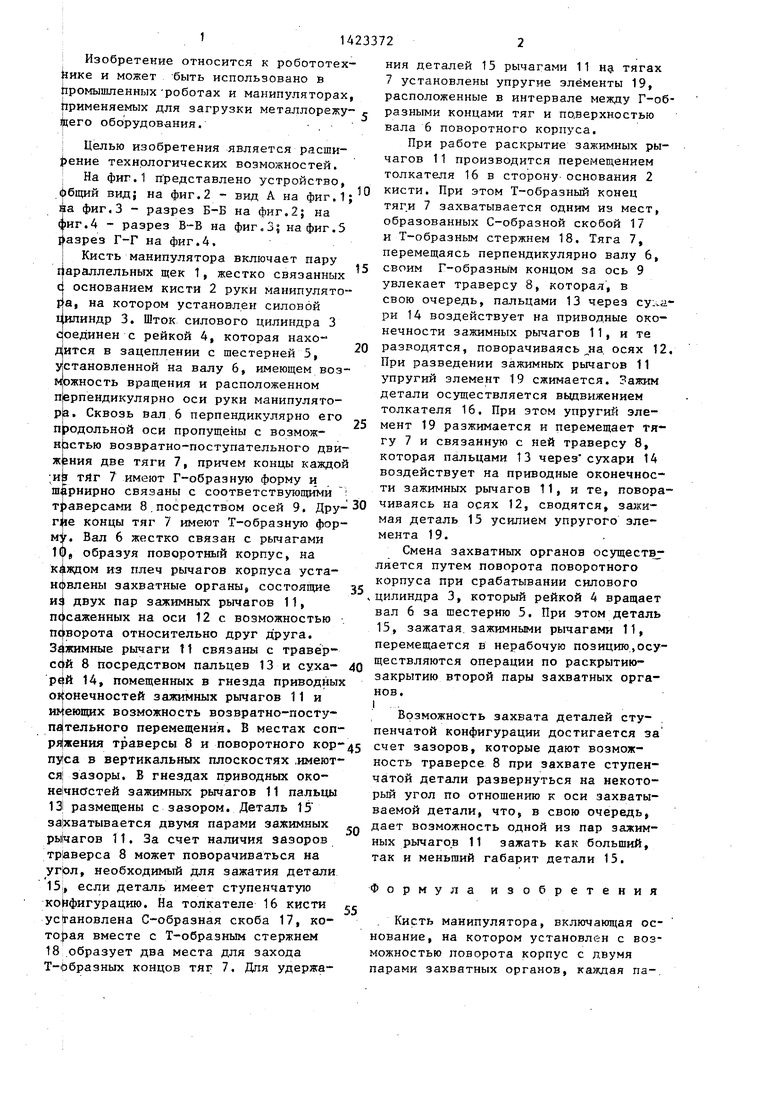
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая литейная линия | 1985 |
|
SU1416269A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1969 |
|
SU251182A1 |
| Захват | 1980 |
|
SU905061A1 |
| Захватная головка манипулятора | 1980 |
|
SU897379A1 |
| Манипулятор | 1985 |
|
SU1315299A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
Изобретение относится к области робототехники и мо жет быть использовано в промьшшенных роботах и манипуляторах, применяемых для загрузки металлорежущего оборудования. Целью , .изобретения является расширение технологических возможностей. Зажим детали осуществляется вьздвижением толкателя. При этом упругий элемент разжимается и перемещает тягу и соя- занную с ней траверсу, которая пальцами через сухари воздействует на приводные оконечности зажимных рычагов 11, и те, поворачиваясь на осях {2, сводятся, зажимая деталь 15 уси-. лием упругого элемента. Смена захватных органов осуществляется путем по- .ворота поворотного корпуса. При этом деталь 15, зажатая зажимными рычагами, перемещается в нерабочую позицию. 5 ил. ie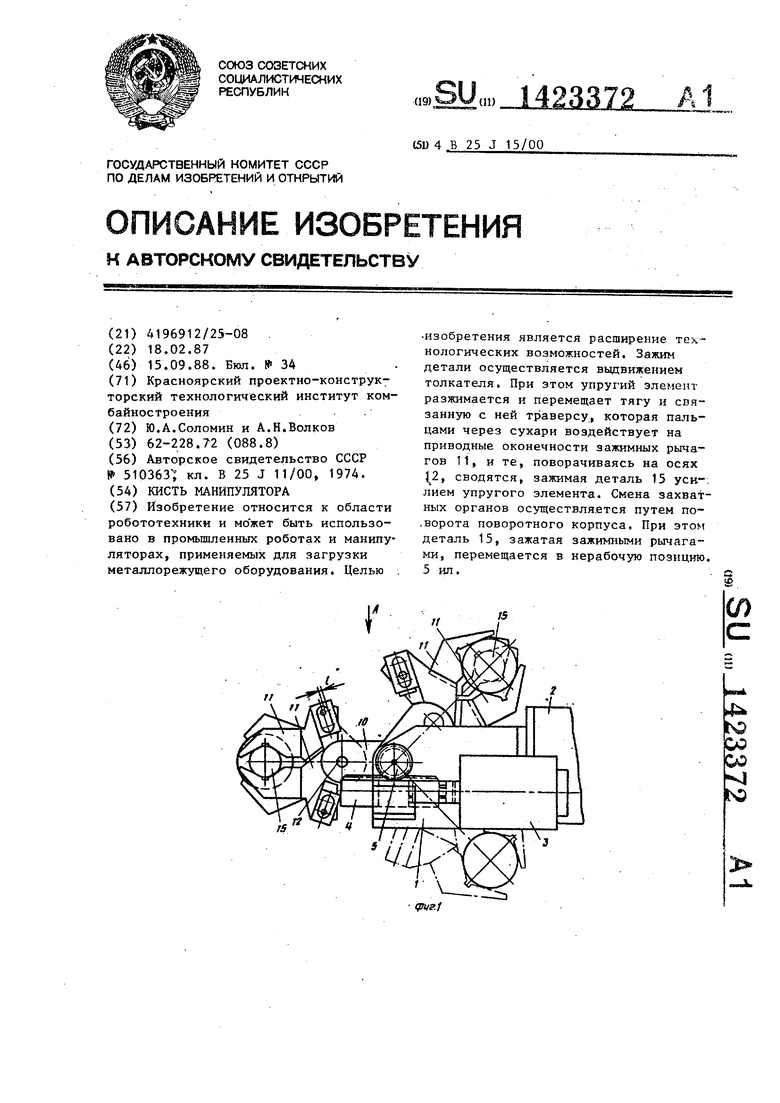
nyjca в вертикальных плоскостях .имеются зазоры. В гнездах приводных око- не|чнсРстей зажимных рычагов 11 пальцы 13J размещены с зазором. Деталь 15 за|хватывается двумя парами зажимных ры1чагов 11. За счет наличия зазоров трйверса 8 может поворачиваться на угЬл, необходимый для зажатия детали 15|, если деталь имеет ступенчатую конфигурацию. На толкателе 16 кисти усЛ ановлена С-образная скоба 17, ко- то. вместе с Т-образным стержнем 18 .образует два места для захода Т-0бразных концов тяг 7. Для удержа
ность траверсе 8 при захвате ступенчатой детали развернуться на некоторый угол по отношению к оси захватываемой детали, что, в свою очередь, дает возможность одной из пар зажимных рычагов 11 зажать как больший, так и меньший габарит детали 13.
Формула изобретения
Кисть манипулятора, включающая основание, на котором установлен с возможностью поворота корпус с двумя парами захватных органов, каждая па-.
pa снабжена тягой и подпружиненной относительно корпуса траверсой, при этом каждый захватный орган пары расположен по разные стороны от тяги и выполнен в виде зажимных рычагов, кинематически связанных с траверсой, причем тяга размещеЯа в. направляющих корпуса, связана с траверсой, а ее свободный конец предназначен для взаимодействия с толкателем, о т If
и
личающаяся тем, что, с целью расширения технологических воз можностей, траверса связана с тягой посредством шарнира, ось которого перпендикулярна оси тяги и оси поворота корпуса, в корпусе выполнены направляющие, в которых размеш,ена траверса с возможностью линейного перемещения и поворота вокруг оси шарнира, связывающего ее с тягой.
Вид
i 61 5 i8il
/; I-//
.2
.
фи, S
| Манипулирующее устройство | 1974 |
|
SU510363A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
