(54) ЗАХВАТ ДЛЯ ПАКЕТОВ ДЛИННОМЕРНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Устройство для захвата груза на поддоне | 1982 |
|
SU1121227A1 |
| ТРАВЕРСА ДЛЯ ЗАХВАТА ПАКЕТА ШПАЛ | 2008 |
|
RU2376235C1 |
| Устройство пакетирования грузов | 2018 |
|
RU2730704C2 |
| Траверса | 1984 |
|
SU1207986A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Захват для поддонов | 1980 |
|
SU935429A1 |
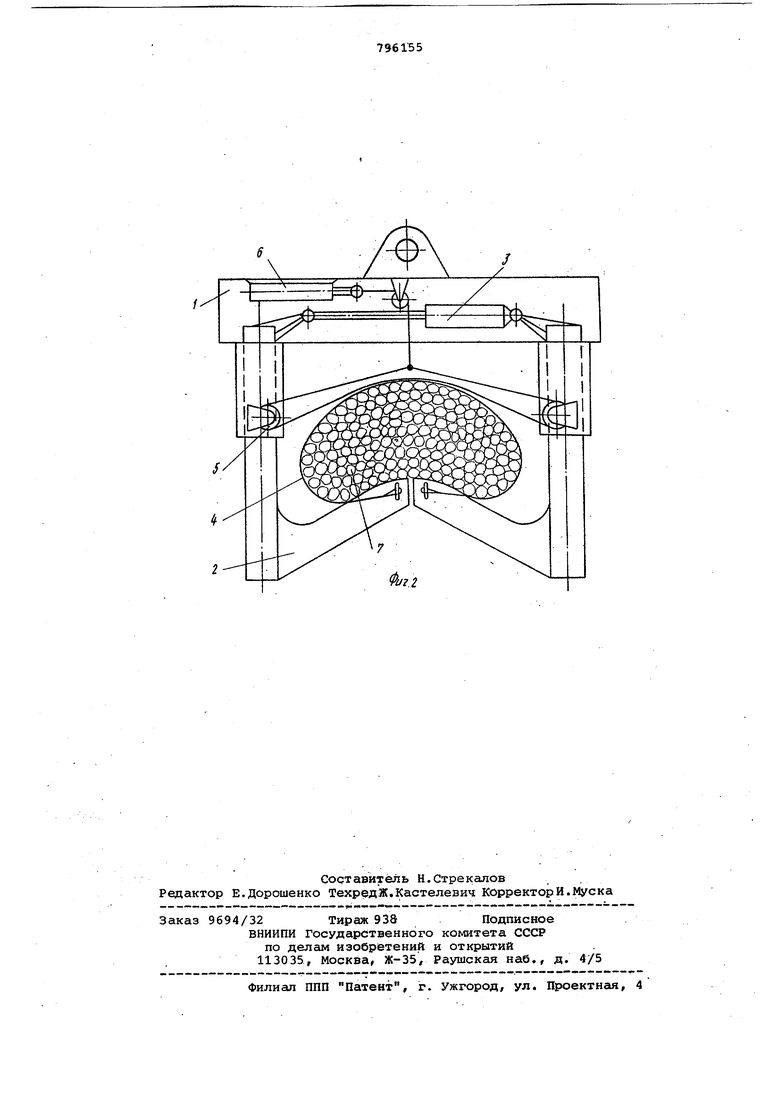
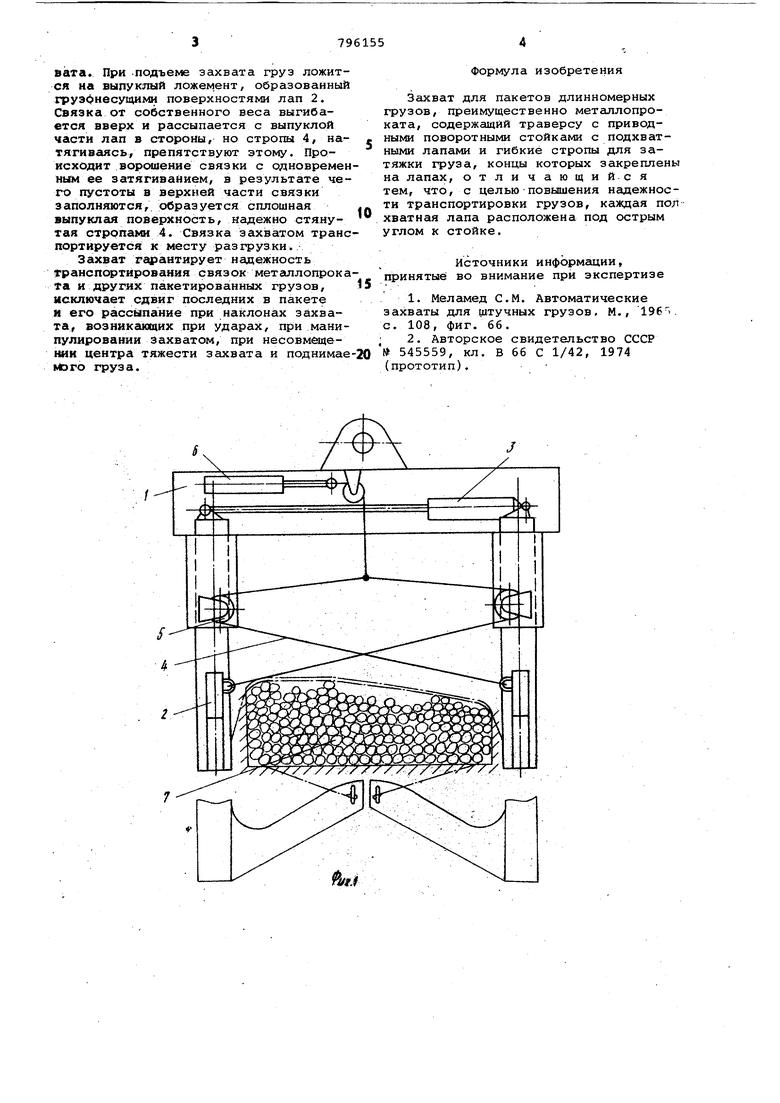
Изобретение относится к крановым (грузозахватным устройствам для грузов, уложенных в пакеты. Известен захват для пакетированны грузов, содержащий раму и подхватные поворотные . Однако при транспортировке грузов с помощью этих подхватов возможны случаи падения груза. Наиболее близким техническим реше нием к предлагаемому является захват для пакетов длинномерных грузов, пре имущественно металлопроката, содержа щий траверсу с приводными поворотнымк стойками с подхватными лапами и гибкие стропы для затяжки груза, кон щл которых закреплены на лапах 2j Однако при трйнспортировке длинно мерного груза в частности металлбпроката из-за неплотного охвата стро памл всей пачки также случаи выпадания груза. Цель изобретения - повышение надежности транспортировки грузов. Поставленная цель достигается тем, что каждая подхватная лада 1)асположена под острым углом к стойке. На фиг. 1 показан захват с разведенными лапами (штрих-пунктиром показано положение захвата при под-. ведении лап под груз); на фиг.2 то же, QO сведенными лапами. Предлагаемое устройство содержит траверсу 1, поворотные подхватные стойки с лапами 2, грузонесущая поверхность которых выполнена под острым углом к стойкам, привод 3 поворота стоек, гибкие стропы 4, огибающие ролики 5, приче1у1 конец каждого стропа закреплен на одной из лап 2, а ролик 5, огибаемый стропом, закреплен со стороны другой лапы так, что стропы перекрещиваются и образуют петлю, привод 6 затягивания стропов. Устройство работает, следующим образом. Захват краном опускается на связку металлопроката 7 до тех пор, пока подхватные лапы 2, находящиеся в разведенном положении, не оказываются ниже связки. При этом стропы 4 ложатся на связку. Крановщик с пульта управления производит поворот подхватных лап 2f причем петля, образуемая стропами при повороте лап, захлестывает груз 7 по всему периметру. Конечные выключатели (на чертеже не показаны) дают сигнал на включение привода затягивания стропов 6 и сигнализируют крановщику о возможности подъема захвата. При подъеме захвата груз ложится на выпуклый ложемент, образованный груэфнесущими поверхностями лап 2. Связка от собственного веса выгибается вверх и рассыпается с выпуклой части лап в стороны, но стропы 4, натягиваясь, препятствуют этому. Происходит ворошение связки с одновремен нам ее затягиванием, в результате чего пустоты в верхней части связки заполняются, образуется сплошная выпуклгш поверхность, надежно стяну тая стропами 4. Связка захватом транс портируется к месту разгрузки. Захват гарантирует надежность транспортирования связок металлопрока та и других: пакетированных грузов, исключает сдвиг последних в пакете И его рассыпание при наклонах захвата, возникающих при ударах, при манипулировании захватом, при несовм ении центра тяжести захвата и поднимае мэго груза.
/ Формула изобретения Захват для пакетов длинномерных грузов, преимущественно металлопроката, содержащий траверсу с приводными поворотными стойками с подхватными лапами и гибкие стропы для затяжки груза, концы которых закреплены на лапах, отличающийся тем, что, с целью повышения надежности транспортировки грузов, каждая пол хватная лапа расположена под острым углом к стойке. Источники информации, гфинятыё во внимание при экспертизе 1.Меламед С.М. Автоматические захваты для штучных грузов, М., 196. с. 108, фиг. 66. 2.Авторское свидетельство СССР ( 545559, кл. В 66 С 1/42, 1974 (прототип).
