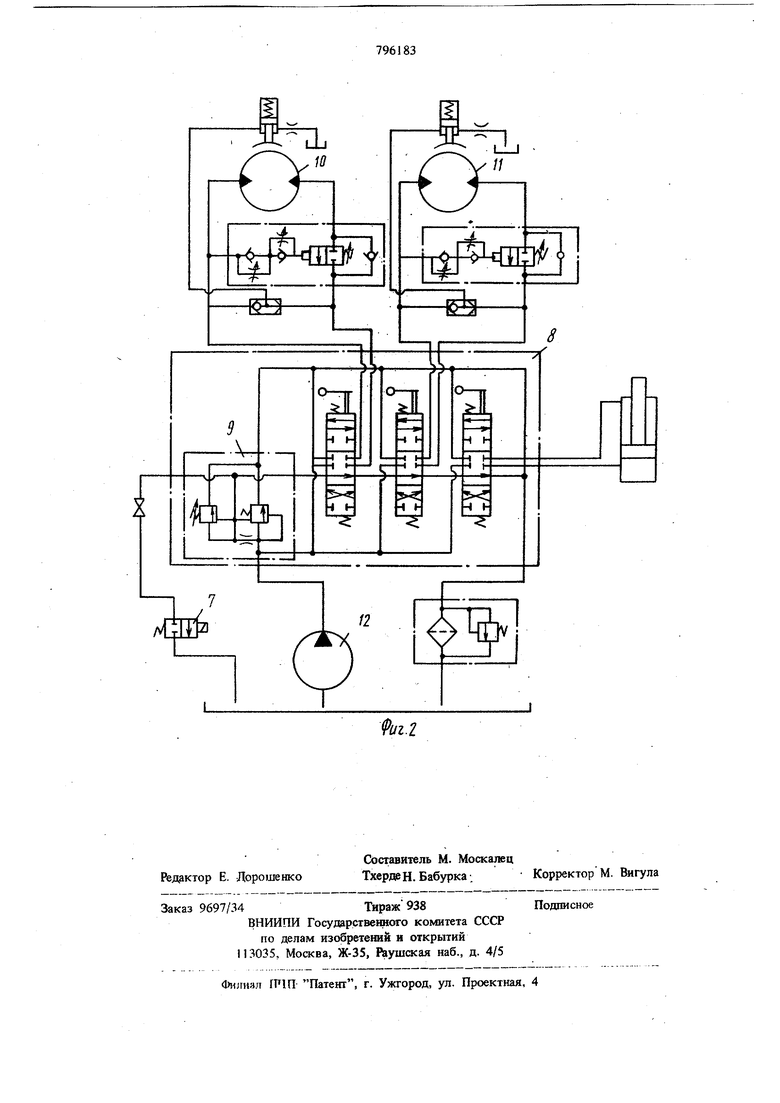
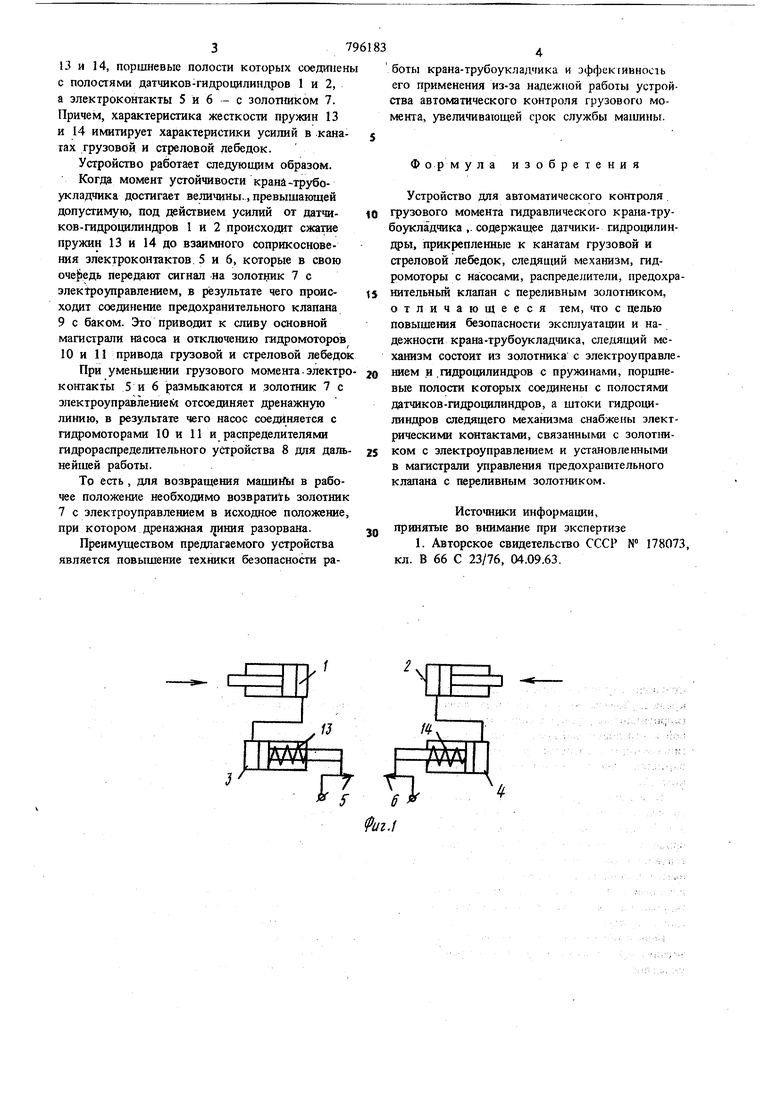
Изобретение отноштся к подъемно-транспорт ному машиностроению, а именно к устройствам для автоматического контроля грузового момента гищ)авлического крама-трубоукладшкйИзвестж) устройство для автоматического каятропя грузового момента П1; фав;в1чеасого крана-трубоукладчика, содержащее дагшкигидроинлиндры, прнкрепленнью к канатам грузо вой и стреловой лебедок, следящий -механизм, гидромогоры с насосами, распределители, 1федохранительный кИтапан с переливным зололшком 1.. Недостатком известного устройства является то, что систематическое ограни%ние момента путем приближения или удаления противовеса щ иводит к сш1же1й1ю надежности работы противовеса кранов- убоукладчиков. Это объясняется нестабильностью работы крана-трубопроводчика, что приводит к постоянной работе гидроцилинда ж противовеса и сокращению срока службы. . Цель изобретения - повышение безопасности экошуатации и надежности работы крана-трубоукладчика.. Цель достигается тем, что следящий механизм состоит из золотника с электроуправлением,. гадрощишндров с пружинами, поршневые полости которых соединены с полостями датчиковгидроцилищфов, а щтоки гидроцилиндров, следящего механизма снабжены электрическими контактами, связанными с золотником с электроуправлением и установленными в магистрали управления предохранительного клапана с переливным золотником. : На фиг. 1 показано устройство для автоматического контроля грузового момента гищ авлического крана|-трубоукладшка;: на фиг. 2 - :схема гидропривода крана. Устройство состоит из датчиков -гидроцилиндров 1 и 2 для измерения усилий в грузовой и стреловой лебедках, следящих мехашзмов 3 и 4 с электрокоятактами 5 и 6, золотиика 7 с эяектрруправлением, пздрораспределительного устройства 8, предохранительного клапана 9 с переливным золотником и гидромоторов 10 и 11, получающих питание от насоса 12. Ш яиизмы 3 и 4 выполнены в виде гидроцилиндров с встроенными в них пружинами
37
13 и 14, поршневые полости которых соединены с полостями датчиков-гидроцилиндров 1 и 2, а электроконтакты 5 и 6 - с золотником 7. Причем, характеристика жесткости пружин 13 и 14 имитирует характеристики усилий в канатах грузовой и стреловой лебедок.
Устройство работает следующим образом.
Когда момент устойчивости крана-трубоукладчика достигает величины., превышающей допустимую, под действием усилий от датчиков-гидроцилиндров 1 и 2 происходит сжатие пружин 13 и 14 до взаимного соприкосновения злектроконтактов 5 и 6, которые в свою очередь передают сигнал на золотщк 7 с элек1роунравлением, в результате чего происходит соединение предохранительного клапана
9с баком. Это приводит к сливу основной магистрали насоса и отключению шдромоторов
10и 11 привода грузовой и стреловой лебедок При уменьшении грузового момента. электро
контакты 5 и 6 размыкаются и золотник 7 с эпектроуправлением отсоединяет дренажную линию, Б результате чего насос соединяется с гидромоторами 10 и 11 и распределителями гидрораспределительного устройства 8 для дальнейшей работы.
То есть , для возвращения маишйЫ в рабочее положение необходимо возвратить золотник 7 с электроуправлением в исходное положение, при котором дренажная 5|иния разорвана.
Преимуществом предлагаемого устройства является повышение техники безопасности работы крана-трубоукладчика и эффективность его применения из-за надежной работы устройства автоматического контроля грузового момента, увеличивающей срок службы машины.
Формула изобретения
Устройство для автоматического контроля. грузового момента гидравлического крана-трубоукла дчика ,. содержащее датчики- гидроцилинщ)ы, прикрепленные к канатам грузовой и стреловой лебедок, следящий механизм, гидромоторы с насосами, распределители, предохранительный клапан с переливным золотником, отличающееся тем, что с целью повышения безопасности эксплуатации и надежности крана-трубоукладчика, следящий механизм состоит из золотника с электроуправлением и .гидроцилиндров с пружинами, поршневые полости которых соединены с полостями датчиков-гидроцилиндров, а штоки гидроцилиндров следящего механизма снабжены электрическими контактами, связанными с золотником с электроуправлетем и установленными в магистрали управления предохранительного клапана с переливным золотником.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 178073 кл. В 66 С 23/76, 04.09.63.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод крана-трубоукладчика | 1976 |
|
SU582184A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Предохранительное устройство для предотвращения опрокидывания стреловой грузоподъемной машины на гусеничном ходу | 1985 |
|
SU1291533A1 |
| Гидропривод крана-трубоукладчика | 1970 |
|
SU802170A1 |
| Гидропривод грузовой лебедкиСТРЕлОВОгО САМОХОдНОгО KPAHA | 1979 |
|
SU800106A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| Гидропривод грузовой лебедки стрелового самоходного крана | 1979 |
|
SU867852A1 |
| Гидросистема трубоукладчика нагуСЕНичНОМ ХОду | 1978 |
|
SU796174A1 |
| Устройство для автоматического управления противовесом стреловых грузоподъемных машин | 1976 |
|
SU658072A1 |