1
Изобретение относится к машиностроению, а именно к механическим устройствам периодического поворота, когда закон движения ведомого звена не имеет существенного значения.
Известен храповой кнопочный механизм, содержащий устройство поворота, ведомое звено которого выполнено в виде храпового колеса с закрепленным на нем квадратным звеном, которое вращается вокруг неподвижной оси под действием подпружиненной собачки, соединенной с кнопкой возвратно-поступательного движения, причем квадратное звено фиксируется при помощи двух пластинчатых пружин 1 .
Однако этот механизм имеет ограниченные функциональные возможности Наиболее близким к предлагаемому является механизм прерывистого движения, содержащий ведущее звено, выполненное в виде стойки, совершающей возвратно-поступательное движение, ведомое звено, выполненное в виде установленной на ведущем звене с возможностью относительного поворота головки с упорами, в частности храпового колеса с размещенными на нем шпильками, которые взаимодействуют при возвратно-поступательном перемещении с неподвижным подпружиненным упором, который является , одновременно узлом фиксации 2 .
Недостатками этого механизма прерывистого движения являются ограниченность его функциональных возможностей из-за отсутствия обеспечения независимости направления
вращения ведомого звена-головки с упорами (храпового колеса со шпильками) при изменении направления перемещения привода возвратно-поступательного движения, так как поворот
ведомого звена осуществляется только при перемещении в одну сторону, например, слева-направо, а сложность конструкции механизма. Цель изобретения - расширение .
функциональных возможностей механизма путем обеспечения независимости поворота ведомого звена на заданный угол в одном направлении от направления и длины перемещения привода
возвратно-поступательного движения и упрощение, конструкции механизма.
Поставленная цель достигается тем, что механизм прерывистого движения, содержащий ведущее звено, выполненное в виде стойки, совершающей возвратно-поступательное движение, и ведомое звено в виде установленной на ведущем звене с возможностью относительного поворота головки с упорами, взаимодействующими при перемещении ведущего звена с неподвижным упором, снабжен дополнительным неподвижным упором, а упоры головки размещены симметрично относительно плоскости ее поворота и попеременно взаимодействуют с одним из неподвижных упоров.
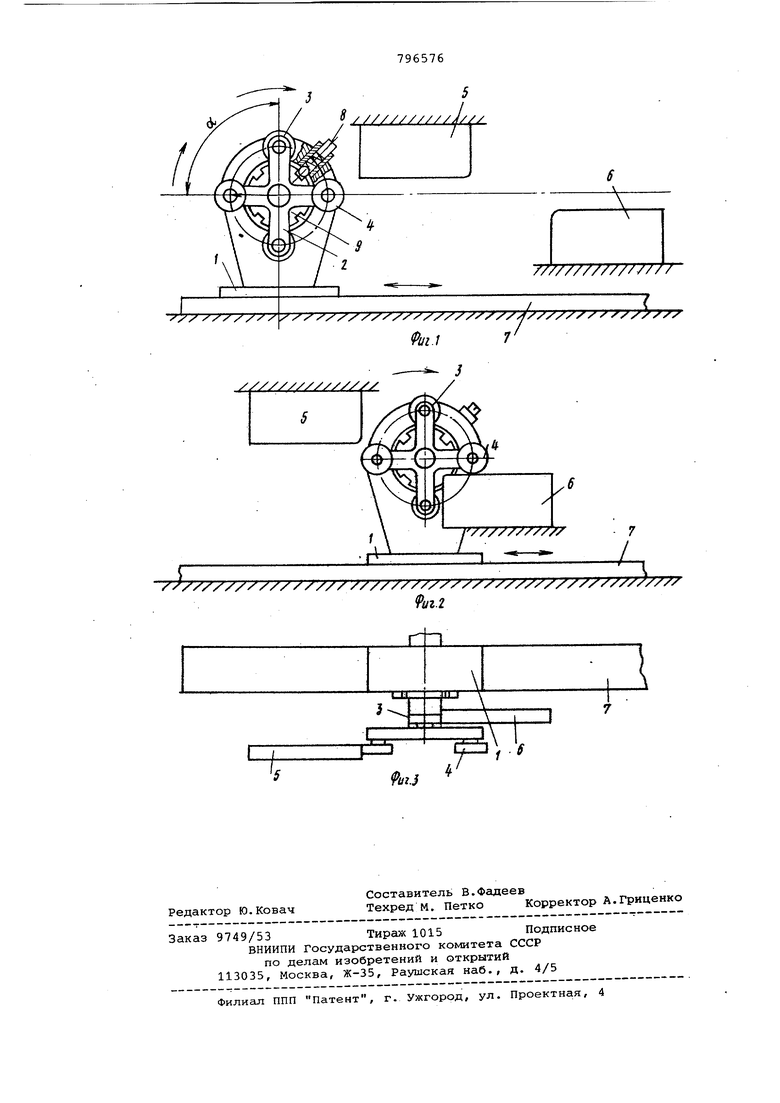
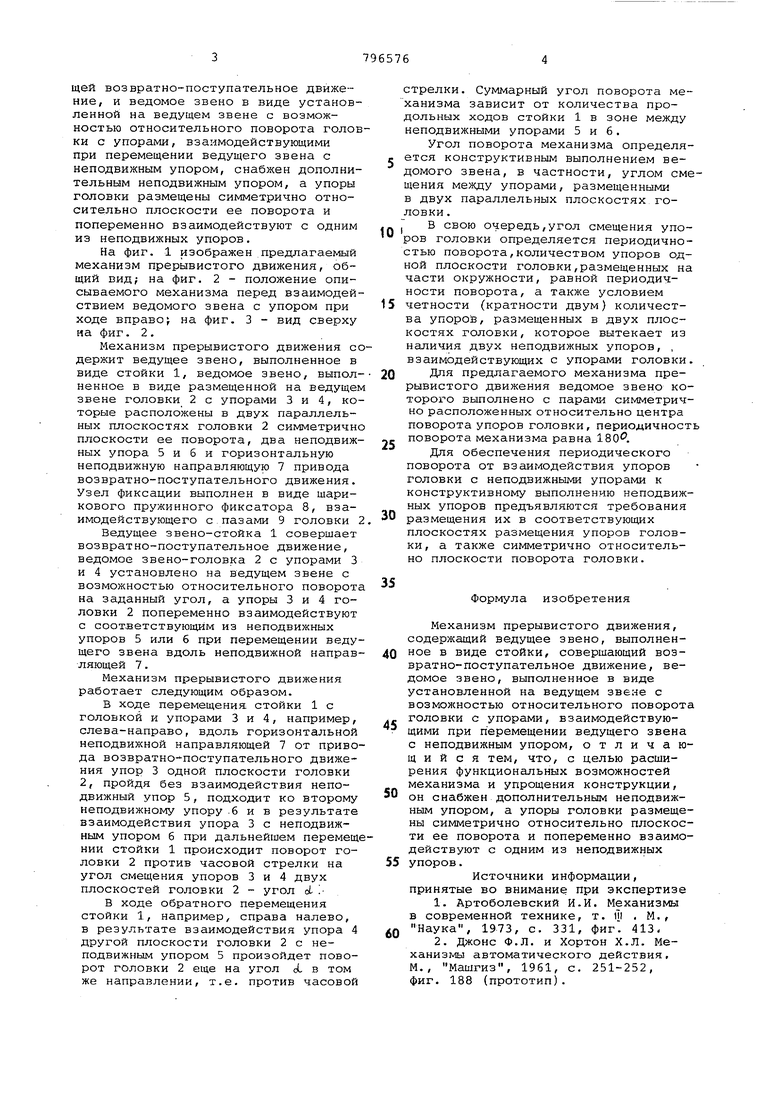
На фиг. 1 изображен предлагаемый механизм прерывистого движения, общий вид; на фиг. 2 - положение описываемого механизма перед взаимодействием ведомого звена с упором при ходе вправоf на фиг. 3 - вид сверху на фиг. 2.
Механизм прерывистого движения содержит ведущее звено, выполненное в виде стойки 1, ведомое звено, выполненное в виде размещенной на ведущем звене головки 2 с упорами 3 и 4/ которые расположены в двух параллельных плоскостях головки 2 симметрично плоскости ее поворота, два неподвижных упора 5 и 6 и горизонтальную неподвижную направляющую 7 привода возвратно-поступательного движения. Узел фиксации выполнен в виде щарикового пружинного фиксатора 8, взаимодействующего с,пазами 9 головки 2
Ведущее звено-стойка 1 совершает возвратно-поступательное движение, ведомое звено-головка 2 с упорами 3 и 4 установлено на ведущем звене с возможностью относительного поворота на заданный угол, а упоры 3 и 4 головки 2 попеременно взаимодействуют с соответствующим из неподвижных упоров 5 или б при перемещении ведущего звена вдоль неподвижной направляющей 7.
Механизм прерывистого движения работает следующим образом.
В ходе перемещения стойки 1 с головкой и упорами 3 и 4, например, слева-направо, вдоль горизонтальной неподвижной направляющей 7 от привода возвратно-поступательного движения упор 3 одной плоскости головки 2, пройдя без взаимодействия неподвижный упор 5, подходит ко второму неподвижному упору .бив результате взаимодействия упора 3 с неподвижным упором б при дальнейшем перемещнии стойки 1 происходит поворот головки 2 против часовой стрелки на угол смещения упоров 3 и 4 двух плоскостей головки 2 - угол oL . В ходе обратного перемещения стойки 1, например, справа налево, в результате взаимодействия упора 4 другой плоскости головки 2 с неподвижным упором 5 произойдет поворот головки 2 еще на угол oL в том же направлении, т.е. против часовой
стрелки. Суммарный угол поворота механизма зависит от количества продольных ходов стойки 1 в зоне между неподвижными упорами 5 и б.
Угол поворота механизма определяется конструктивным выполнением ведомого звена, в частности, углом смещения между упорами, размещенными в двух параллельных плоскостях головки .
В свою очередь,угол смещения упоров головки определяется периодичностью поворота,количеством упоров одной плоскости головки,размещенных на части окружности, равной периодичности поворота, а также условием 5 четности (кратности двум) количества упоров, размещенных в двух плоскостях головки, которое вытекает из наличия двух неподвижных упоров, , взаимодействующих с упорами головки. 0 Для предлагаемого механизма прерывистого движения ведомое звено которого выполнено с парами симметрично расположенных относительно центра поворота упоров головки, периодичность поворота механизма равна 180.
Для обеспечения периодического поворота от взаимодействия упоров головки с неподвижными упорами к конструктивному выполнению неподвижных упоров предъявляются требования 0 размещения их в соответствующих
плоскостях размещения упоров головки, а также симметрично относительно плоскости поворота головки.
Формула изобретения
Механизм прерывистого движения, содержащий ведущее звено, выполненное в виде стойки, совершающий возвратно-поступательное движение, ведомое звено, выполненное в виде установленной на ведущем звене с возможностью относительного поворота головки с упорами, взаимодействующими при перемещении ведущего звена с неподвижным упором, отличающийся тем, что, с целью расширения функциональных возможностей механизма и упрощения конструкции,
он снабжен дополнительным неподвижным упором, а упоры головки размещены симметрично относительно плоскости ее поворота и попеременно взаимодействуют с одним из неподвижных
5 упоров.
Источники информации, принятые во внимание при экспертизе
1.Артоболевский И.И. Механизмы в современной технике, т. ш . М.,
Q Наука, 1973, с. 331, фиг. 413
2.Джонс Ф.Л. и Хортон Х.Л. Механизмы автоматического действия, М., Машгиз, 1961, с. 251-252, фиг. 188 (прототип).
7X////XX X // ,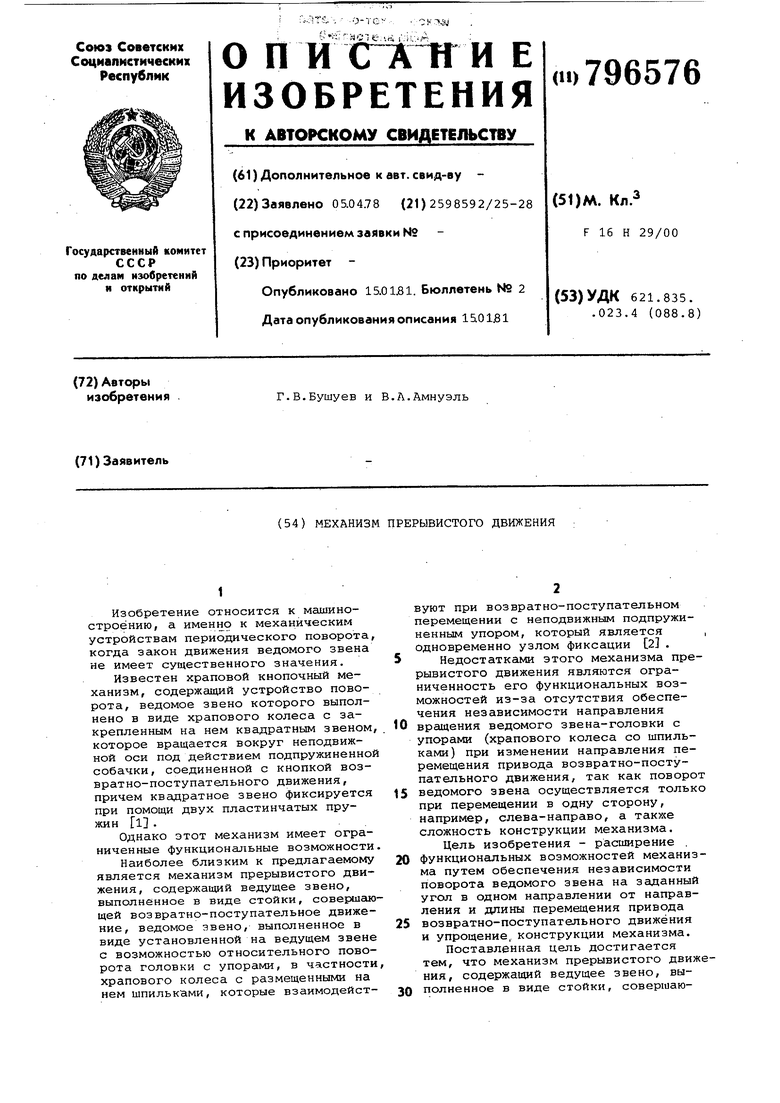
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагового поворота | 1982 |
|
SU1075040A1 |
| Способ и устройства механической обработки шатунных шеек крупногабаритного коленчатого вала на токарном станке | 2015 |
|
RU2625151C2 |
| РЕЕЧНАЯ ПЕРЕДАЧА | 2003 |
|
RU2230244C1 |
| Устройство для правки лезвий безопасных бритв | 1990 |
|
SU1712131A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2006 |
|
RU2306470C1 |
| Храповой механизм для прерывистого движения при больших нагрузках | 1982 |
|
SU1143912A1 |
| Механизм для преобразования возвратно-поступательного движения в прерывистое | 1982 |
|
SU1054608A1 |
| Устройство для перемещения изделий | 1985 |
|
SU1293016A1 |
| СПОСОБ СОЕДИНЕНИЯ ЛИСТОВЫХ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО ФЛАНЦЕВ ИЗ ШИН К ВОЗДУХОВОДАМ, СЕКЦИЙ КАРМАННЫХ ФИЛЬТРОВ ОЧИСТКИ ВОЗДУХА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557844C1 |