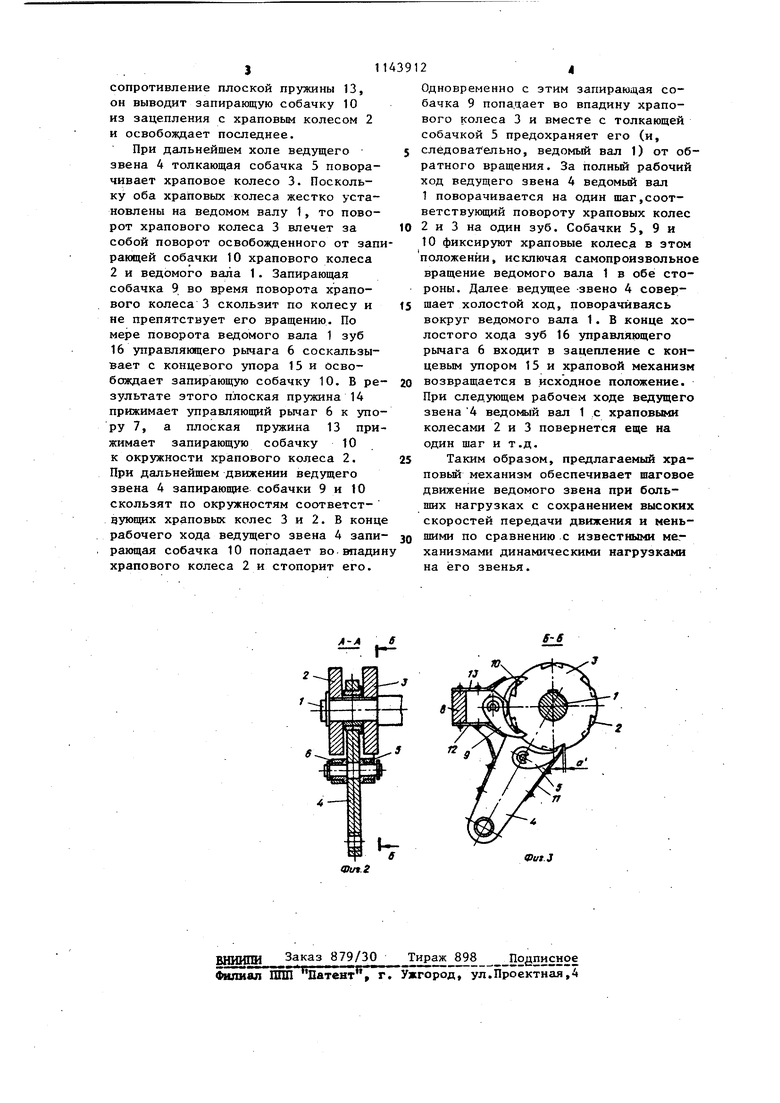
1 Изобретение относится к мащиностроению, а именно к механизмам пре образования возвратно-поступательно го движения в прерывистое вращение, и может быть использовано для обесп чения одностороннего шагового движе ния ведомого эвена при больших моме тах сопротивлений, постоянно действующих в направлении движения. Известен храповой механизм для прерьтистого движения при больших нагрузках, содержащий ведомьш вал, жестко установленные на нем два храповых колеса с противоположно направленньми зубьями, свободно уст новлецное на валу ведущее звено, шарнирно закрепленные на нем толкаю щую собачку и управляющий рычаг, вз имодействуюпще с рычагом упор и две запирающих собачки, одна из которых с концевым упором. Управляющий рычаг установлен на ведущем звене на расстоянии от оси егр вращения большем, чем расстояние до толкающей собачки, упор неподвижно закреп лен в корпусе, а запирающая собачка с концевым упором выполнена в виде одноплечего рычага СОНедостатком данного механизма является низкая его надежность вследствие больших динамических . нагрузок, возникающих при взаимодей ствии управляющего рычага и концевого упора запирающей собачки с неподвижным упором, закрепленным в корпусе. Цель изобретения - повьшзение надежности в работе храпового механизма. Поставленная цель достигается тем, что в храповом механизме для прерывистого движения при больших нагрузках, содержащем ведомый вал, жестко установленные в нем два храповых колеса с противоположно напра ленными зубьями, свободно установленное на валу ведущее звено, шарнирно закрепленные на нем толкающую собачку и управляющий рычаг, взаимо действуклцие с рычагом упор и две запирающих собачки, одна из которых с концевым упором :, управляющий рычаг установлен на ведущем звене на расстоянии от его оси вращения, меньшем или равном расстоянию от оси вращения ведущего звена до оси толкающей собачки, запирающая собачка с концевым упором вьшолнена в виде двуплечего рычага, а упор закреплен на ведущем звене. На фиг. 1 изображен храповый механизм, общий вид; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез В-Б на фиг. 2. Храповый механизм для прерывистого- движения при больших нагрузках содержит ведомьй вал 1, жестко установленные на нем храповые колеса 2 и 3, свободно сидящие на валу 1 ведущее звено 4 с толкающей собачкой 5, управляюпщм рычагом 6 и упором 7, стойку 8 с запирающими собачками 9 и 10, а также плоские пружины 11 14 для возврата собачек5, 9 и 10 и управляющего рычага 6 в исходное положение. Запирающие собачки 9 и 10 укреплены на стойке 8 шарнирно. На запирающей собачке 10 смонтирован концевой упор 15, с которым контактирует зуб 16 управляющего рычага 6. Толкающая собачка 5 и управляющий рычаг 6 шарнирно установлены на ведущем звене 4 и имеют общую ось 17. Между толкающей собачкой 5 и зубом храпового колеса 3 предусмотрен зазор 0 . Храповые колеса 2 и 3 имеют одинаковое число зубьев и так установлены на ведомом валу 1, что зубья храпового колеса 2 направлены навстречу зубьям храпового колеса 3. Храповый механизм работает следующим обра.зом. В исходном положении запирающая собачка 10 находится в зацеплении с храповым колесом 2 и прижимается к нему плоской пружиной 13, а толкакнцая собачка 5 и запирающая собачка 9 находится в зацеплении с храповым колесом 3 и поджаты плоскими пруткинами 11 и 12 соответственно. В этом положении зуб 16 управляющего рычага 6 находится в зацеплении с концевым упором 15, смонтированным на запирающей собач- ке 10, амежду управляющим рычагом 6 и упором 7 имеется зазор (не обозначен) . В начале рабочего хода ведущего звена 4 толкаилцая собачка 5,шарнирно связанная с ним, выбирает зазор сх . Управляющий рычаг 6,перемещаясь вместе с ведущим звеном 4, своим зубом 16 за концевой упор 15 тянет за собой запирающую собачку 10. Преодолевая сопротивление плоской пружины 13, он выводит запирающую собачку 10 из зацепления с храповым колесом 2 и освобождает последнее. При дальнейшем холе ведущего звена 4 толкающая собачка 5 поворачивает храповое колесо 3. Поскольку оба храповых колеса жестко установлены на ведомом валу 1, то поворот храпового колеса 3 влечет за собой поворот освобожденного от зап рающей собачки 10 храпового колеса 2 и ведомого вала 1. Запирающая собачка 9 во время поворота храпового колеса 3 скользит по колесу и не препятствует его вращению. По мере поворота ведомого вала 1 зуб 16 управляющего рычага 6 соскальзывает с концевого упора 15 и освобождает запирающую собачку 10. В ре зультате этого плоская пружина 14 прижимает управляющий рычаг 6 к упо ру 7, а плоская пружина 13 при жимает запирающую собачку 10 к окружности храпового колеса 2. При дальнейшем движении ведущего звена 4 запирающие собачки 9 и 10 скользят по окружностям соответствуюпщх храповых колес 3 и 2. В кон рабочего хода ведущего звена 4 зап рающая собачка 10 попадает во впади храпового колеса 2 и стопорит его. Одновременно с этим запирающая собачка 9 попадает во впадину храпового колеса 3 и вместе с толкающей собачкой 5 предохраняет его (и, следовательно, ведомый вал 1) от обратного вращения. За полный рабочий ход ведущего звена 4 ведомый вал 1поворачивается на один шаг,соответствующий повороту храповых колес 2и 3 на один зуб. Собачки 5, 9 и 10 фиксируют храповые колес.а в этом положении, исключая самопроизвольное вращение ведомого вала 1 в обе стороны. Далее ведущее звено 4 совершает холостой ход, поворачиваясь вокруг ведомого вала 1. В конце холостого хода зуб 16 управляющего рычага 6 входит в зацепление с концевым упором 15 и храповой механизм возвращается в исходное положение. При следующем рабочем ходе ведущего звена 4 ведогфгй вал 1 с храповшш колесами 2 и 3 повернется еще на один шаг и т.д. Таким образом, предлагаемый храповьй механизм обеспечивает шаговое движение ведомого звена при больших нагрузках с сохранением высоких скоростей передачи движения и меньшими по сравнению с известными мег ханизмами динамическими нагрузками на его звенья.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР ХРАПОВОЙ РЕВЕРСИВНЫЙ | 2003 |
|
RU2253780C1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2321787C1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| СПОСОБ СОЕДИНЕНИЯ ЛИСТОВЫХ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО ФЛАНЦЕВ ИЗ ШИН К ВОЗДУХОВОДАМ, СЕКЦИЙ КАРМАННЫХ ФИЛЬТРОВ ОЧИСТКИ ВОЗДУХА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557844C1 |
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| Устройство для импульсной подачи электродной проволоки | 1990 |
|
SU1801711A1 |
| Храповой механизм регулируемой подачи /его варианты/ | 1973 |
|
SU950986A1 |
| Храповой механизм | 1986 |
|
SU1404713A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Дискретная реверсивная передача | 1981 |
|
SU1044872A1 |
ХРАПОВОЙ МЕХАНИЗМ ДЛЯ ПРЕРЫВИСТОГО ДВИЖЕНИЯ ПРИ БОЛЬШИХ НАГРУЗКАХ, содержащий ведомый вал, жестко установленные на нем два храповых колеса с противоположно направленньяи зубьями, свободно установленное на валу ведущее звено, шарнирно закрепленные на нем толкающую собачку и управляющий рычаг, взаимодействующие с рычагом упор и две запирающих собачки, одна из которых с концевым упором, отличающийся тем, что, с целью повьпаения надежности в работе, управляющий рычаг установлен на ведущем звене на расстоянии от его оси вращения, меньшем или равном расстоянию от оси вращения ведущего звена до оси толкающей собачки, запирающая собачка с концевым упором выполнена в виде двупле.чего рычага, а упор закреплен на ведущем звене. 0
Ю
13
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Храповой механизм для прерывистого движения при больших нагрузках | 1980 |
|
SU868205A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
