ханизмов; во-вторых, для установки пневмоцилиндра над колпаками необходим навесной жесткий кронштейн, связанный с основанием карусели, что ухудшает компоновку автомата и безопасность его обслуживания; в-третьих, наличие пневмоцилиндров и системы для их управления снижает надежность работы автомата, делает необходимым введение соответствующей блокировки.
Наиболее близкой к предлагаемой по технической сущности и достигаемому эффекту является конструкция автомата для сборки и заварки геркон со сборочными механизмами, расположенньами на карусели. На каждой позиции карусели для герметизации сборочных механизмов установлены колпаки, которые; поднимаются и опускаются с помощью подвижной штанги, приводимой в действие от копиров, установленных на основании карусели. Поджим колпака к основанию сборочного механизма осуществляется с помощью двух замков, представляющих собой диски со спиральными , расположенные сверху карусели на боковых сторонах основания сборочного механизма. При повороте .дисков в. их спиральные пазы входят цилиндрические выступы, рас-т положенные на внешних боковых сторонах колпака и, тем самым, за счет сил трения колпак удерживается в нижнем поджатом пол ожении. Поворот диска при герметизации с обеспечением требуемого усилия поджатия осуществляется с помощью специального механизма, которое должно вводиться в зону между сборочными механизмами и входить в зацепление с поворотными дисками 4. I .
Недостатками этой конструкции являются . расположение двух замков с боковых сторон сборочных механизмов что увеличивает габариты карусели, а также необходимость применения специальных механизмов для поворота замков, которые должны вводиться в зону между сборочными механизмами, что снижает надежность работы автомата и требует соответствующей блокировки.
Кроме того, данное устройство герметизации и устройство герметизации примененное в автомате фирмы Федерал Тул, работают только во время выстоя карусели, поэтому их нельзя применить в машинах непреЕялвного действия.
Цель изобретения - повьшнение надежности и упрощение конструкции ai томата.
Эта цель достигается тем, что на каждой позиции снизу карусели уста.новлены мехаИ1{змы зажимов колпаков, состоящие из корпуса, закрепленного на карусели, винта, жестко связанного с рычагом, и гайки со скобой,
имеющей вырезы для зацепления с подвижными штангами, на которых установлены колпаки, а на основании карусели расположены копиры, осуществляющие поворот рычага винта и скобы гайки при герметизации и разгерметизации сборочных механизмов. Копиры могут быть установлены на учаске -торможения карусели.
При этом за счет поворота карусели от копиров, установленных на основании карусели, выполняются подъем и опускание колпаков на подвижны штангах, зацепление скобы со штангами, поджим колпака к основанию сборочного устройства посредством воздействия копиров на скобу и рычаг винта при герметизации При разгерметизации выполняются, соответствен но, обратные действия.
Установка копиров для поворота рычага и скобы на участке торможения карусели позволяет использовать момент инерции карусели для поворота винта зажима при герметизации и разгерметизации и тем самым уменьши усилие на привод и улучшить условие торможения карусели.
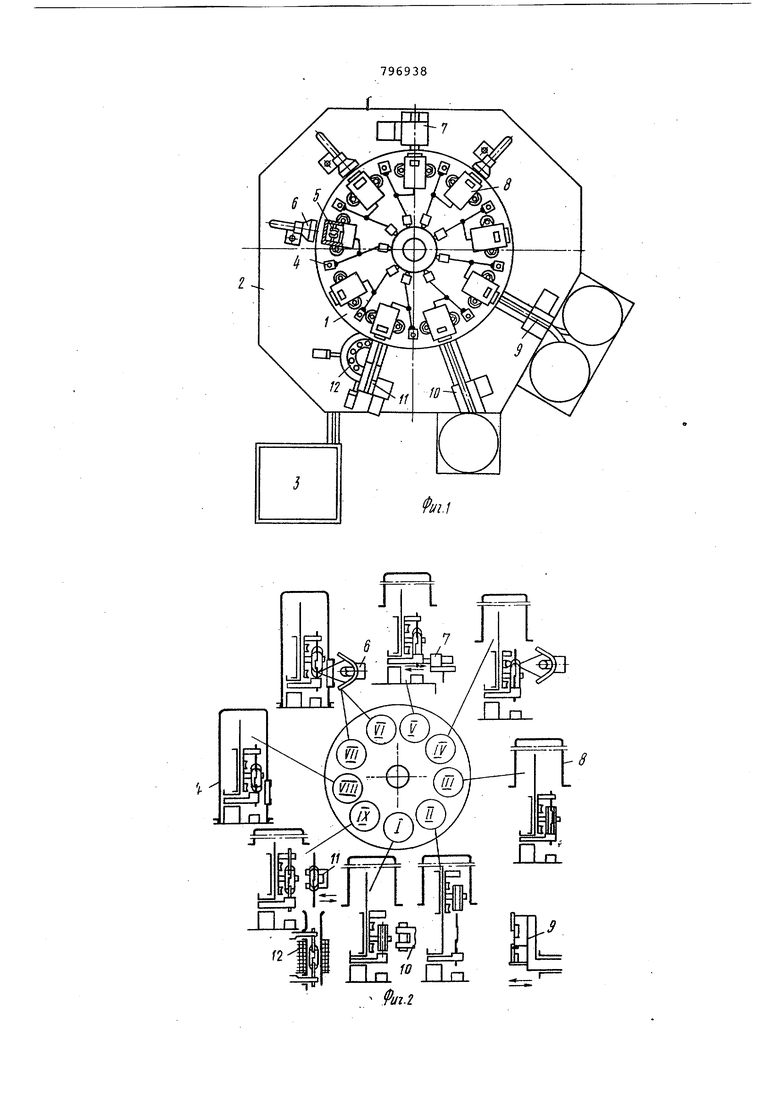
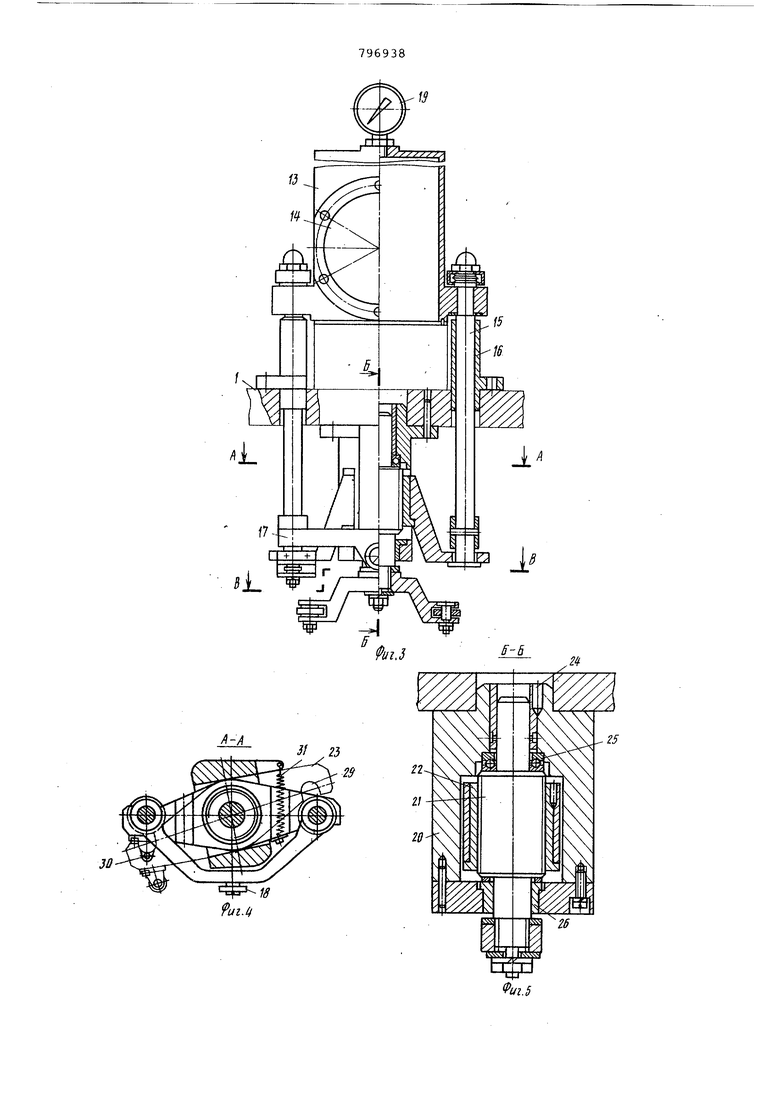
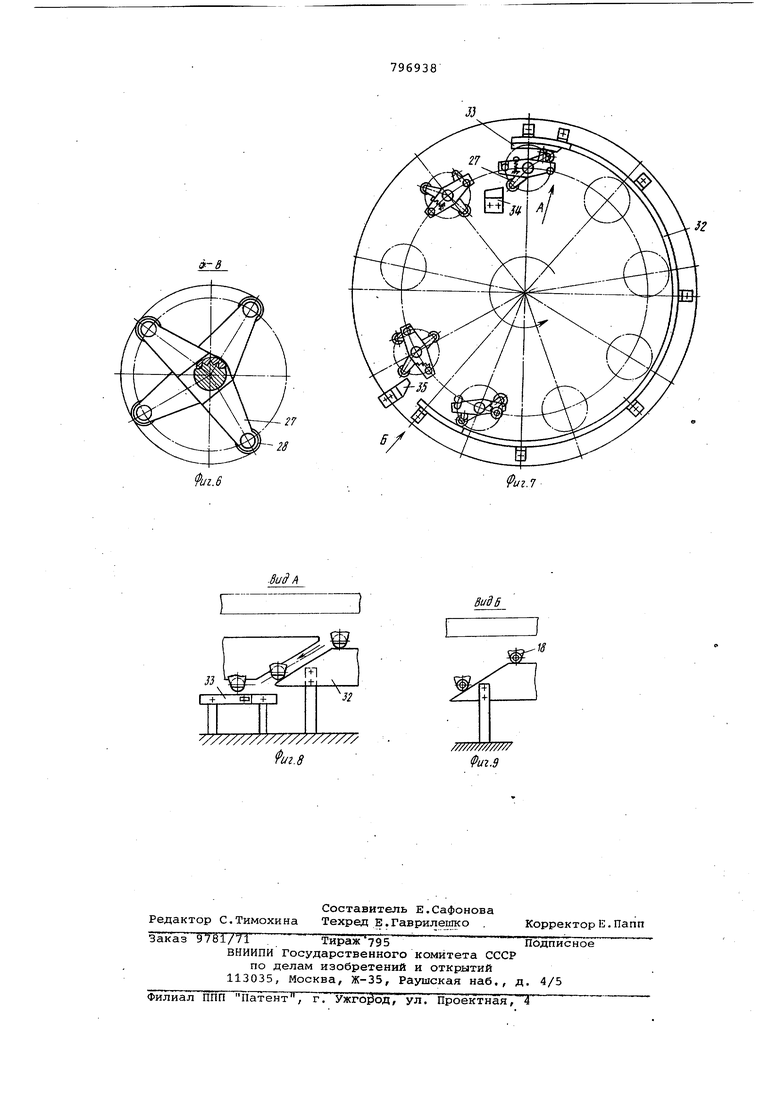
На фиг. 1 схематически показан предлагаемый автомат; на фиг. 2 схема процесса сборки и заварки геркона; на фиг. 3 - колпак, вид спереди; на фиг. 4 - разрез А-А на фиг. на фиг. 5 - разрез Б-Б на фиг. 3; на фиг. 6 - разрез В-В на фиг. 3; на фиг. 7 - схема расположения копиров для подъема, опускания герметизации и разгерметизации колпаков; на фиг. 8 - вид А на фиг. 1; на фигвид Б на фиг. 7.
Автомат содержит карусель 1 с приводом, основание 2 карусели, систему 3 питания и управления, выполненную в виде отдельной стойки, систему 4 подачи энергоносителей, сборочные механизмы 5,источники 6 инф ракрасного излучения, механизм 7 поворота для настройки межконтактного зазора, колпаки 8 с механизмами зажимов, механизм 9 для загрузки контакт-деталей, механизм 10 для загрузки баллонов, механизм 11 для выгрузки готовых герконов и устройство 12 контроля и сортировки герконов . .
На карусели 1 установлены сборочные механизмы 5, система 4 подачи энергоносителей к ним и колпаки 8 дл герметизации сборных механизмов. Механизмы зажимов колпаков закреплены на нижней стороне карусели.
На основании 2 карусели расположены механизмы для заварки, механизм .7 поворота, механизмы 9 и 10 для загрузки контакт-деталей и баллонов и .устройство .12 контроля и сортировки герконов.
Система 4 подачи энергоносителей к сборочным механизмам состоит из элементов, обеспечивающих стабилизацию, регулировку и подвод газа к сборочным механизмам для продувки баллона в процессе заварки и наполнения колпака а также подачу напря жения на контакт-детали при настрой ке межконтактного зазора. Механизм для заварки состоит из источника 6 (лампы) инфракрасного и лучения, установленного в фокусе ре лектора эллипсоидной формы, имеющег высокую отрицательную способность. Механизм 7 поворота представляет со бой, привод с точным остановом для вращения поводка сборочного устройства. В качестве механизмов 9 и 10 для загрузки контакт-деталей и баллонов механизмов для выгрузки герконов мо гут быть использованы общеизвестные механизмы, работающие на вибрационном и магнитном принципе. Устройство 12 контроля и сортиро ки также имеет известную конструкци содержащую карусель для охлаждения герконов и катушку для контроля маг нитодвижущей силы срабатывания. Колпак (фиг.З) представляет собой герметичную камеру 13 с окном 14 из- кварцевого стекла для пропускани инфракрасного, излучения, установлен ную на подвижных штангах 15. На нижней плоскости колпака имеется уплотнение из эластичного мате риала. Штанги 15 перемещаются во втулках 16, закрепленных в карусели 1. (фиг. 1), На нижних концах штанг закреплена скоба 17 с роликом 18, с помощью которого штанги могут подни маться и опускаться от копиров, установленных на основании 2 (фиг. 1) при вращении карусели 1. Для контроля давления под колпаком на нем установлен манометр 19. Механизм зажима колпака (фиг. 5) со тоит из основания 20, винта 21 и гайки 22 со скобой 23. Винт 21 установлен в подшипниках 24-26. Подшипник 25 является упорным для воеприятия осевого усилия. На конце винта жестко закреплен рычаг 17, имеющий ролики 28 (фиг. 6), с помощью которых рычаг 27 может поворачиваться от копиров, установленных на основании 2 (фиг. 1). Скоба 23 имеет пазы 29 для закрепления со штангами. На скобе установлен ролик 30 для поворота ее в положение зацепления со штангами и пружина 31 для возврата ее в исходное положение (фиг. 4). Система копиров, установленная tia основании 2 под каруселью, для /правления работой колпакся (фиг. 7 включает копир 32 подъема и опускания колпаков, копир 33 поворота скобы 23 (фиг. 3), копир 34 поворота рычага 27 при герметизации и копир 35 для поворота рычага 27 в обратную сторону при разгерметизации. Все копиры жестко установлены на основании 2 карусели. Автомат работает следующим образом. Вращение карусели осуществляется от привода известной конструкции. На позициях I и II (фиг. 2) производится загрузка баллонов и контактдеталей в сборочные устройства известными способами с помощью механизмов 11 .и 10 (фиг. 1) . На позиции Ш контакт-детали вводятся в баллон с обеспечением требуемой точности их взаимного положения. Базирование деталей геркона , закрепление их в держателях сборочного устройства и взаимное перемещение при сборке осуществляется так .же, как в известном устройстве. На позиции IV производится заварка верхней контакт-детали известным способом с помощью источника 6 инфракрасного излучения, а на позиции V - настройка межконтактного зазора также по известному спсузобу - с помощью механизма поворота 7. Выполнение всех указанных операций происходит при поднятом вверх колпаке 8. При переходе с позиции V на позицию YI колпак опускается вниз за счет перемещения ролика 18 (фиг. в) по скосу копира 32, после опускания колпака ролик 30 от воздействия копира 33 поворачивает скобу 23 в положение, в котором скоба своими пазами 29 (фиг. 4) входит в зацепление со штангами 15. В конце этого перехода ролик 28 находит на копир 34 и обеспечивает поворот рычага 27 и винта 21 (фиг. 5). Поворот винта 21 перемещает гайку 22, связанную с ней скобу 23 штанги 15 и камеру 13 вниз. Это движение поджимает плоскость колпака с уплотнительным элементом к плоскости сборочного механизма и тем самым обеспечивает его герметизацию. Наличие самоторможения в винтовой паре гарантирует надежный поджим колпака при его перемещении по последующим позициям. Копир 34 установлен на участке торможения карусели,- что позволяет накопленную энергию движения (вращения карусели использовать для поворота винта 21 Hf таким образом не создавать дополнительной нагрузки на привод карусели, а также улучшить торможение карусели. На позициях Y1 и VII происходит заварка нижней контакт-детали под колаком. Сфокусированное инфракрасное злучение происходит через кварцевое кно 14 в колпаке. в конце процесса заварки обеспечивается резкий подъем давления под колпаком, что улучшает форму спая и повышает стабильность процесс его образования. При переходе сборочного еханизма с колпаком с позиции VII на
позицию V11I на участке торможения карусели второй ролик 28 рычага 27 находит на копир 35, поворачивает рычаг 27 и винт 21 в другую сторону, что обеспечивает подъем вверх гайки
22и скобы 23, Это движение снимает усилие поджима с колпака и производит разгерметизацию сборочного механизма. За счет пружины 31 скоба 23 выходит из зацепления со штангами 15 и устанавливается в исходное положение. Для повышения надежности выхода скобы из зацепления можно установить дополнительный ролик на скобе
23и копир ее принудительного вывода.
При переходе с позиции VllI на позицию IX ролик 18 обеспечивает подъем по копиру 32 (фиг. 9) колпака 8. На позиции VlII происходит охлаждение геркона, а на позиции IX его выгрузка в устройство контроля и сортировки. Выгрузка, контроль и сортировка производится по известным способам.
Таким образом, предложенное устройство позволяет использовать вращение карусели для герметизации и разгерметизации без введения какихлибо приводов (пневмоцилиндров, специальных устройств); применять его не только в автоматах периодического действия, но и в автоматах непрерывного действия упростить конструкцию машин, выполнить ее более компактной, так как все устройства для герметизации расположены под каруселью.
Кроме того, предложенная конструкция автомата позволяет осуществит подъем, опускание, герметизацию и разгерметизацию колпаков от копиров установленных на основании карусели что обеспечивает жесткую связь между переходами по всему циклу работы колпаков и исключает необходимость «ведения блокировки. Это упрощает
конструкцию автомата и повышает надежность его работы.
Формула изобретения
1.Автомат для сборки и заварки герконов, содержащий многопоэиционную- карусель с приводом, имеющую участки разгона и торможения, установленную на основании, систему питания и управления, систему подачи знергоносителей, механизмы для загрузки и выгрузки, сборочные механизмы, механизмы для заварки, механизм для настройки межконтактного зазора, колпаки для герметизации, установленные на подвижных штангах, и механизмы зажимов колпаков, о т личающийся тем, что, с целью повышения надежности и упрощения конструкции автомата, механизмы зажимбв колпаков установлены, снизу на каждой позиции карусели и каждый из них выполнен в виде корпуса, винта
с рычагом и гайки со скобой, имеющей вырезы для соединения с подвижными штангами, на которых установлены колпаки, а на основании карусели дополнительно установлены копиры для поворота рычага винта и скобы гайки при герметизации и разгерметизации сборочных механизмов.
2.Автомат по п. 1, отличаЬ) щ и и с я тем, что копиры для поворота рысага и скобы установлены на участке торможения карусели.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3539323, 65-139, 1975.
2, Патент США I 3537276, 65-59, 0 1975.
3.Авторское свидетельство СССР № 561230, кл. Н 01 Н 49/00, 1976.
4.Патент США № 3273989/, 65-154, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки и заварки магнитоуправляемых контактов | 1974 |
|
SU530362A1 |
| Способ сборки герконов и устройство для его осуществления | 1990 |
|
SU1756959A1 |
| Устройство для сборки герконов | 1988 |
|
SU1605285A1 |
| Способ сборки герконов и устройство для его осуществления | 1985 |
|
SU1292056A1 |
| Загрузочное устройство шиберного типа | 1982 |
|
SU1060851A1 |
| Автомат для подготовки электрическихпРОВОдОВ K МОНТАжу | 1978 |
|
SU845207A1 |
| Машина для заврки ламп-фар | 1975 |
|
SU589647A1 |
| МНОГОПОЗИЦИОННЫЙ АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1972 |
|
SU435915A1 |
| Автомат для испытания изделий на герметичность | 1983 |
|
SU1132159A1 |
| АВТОМАТ ДЛЯ МОНТАЖА ТЕЛА НАКАЛА ЭЛЕКТРИЧЕСКИХ ЛАМП НАКАЛИВАНИЯ | 1972 |
|
SU343322A1 |
Eb-TLn
fm.l
г.7
ВидВ
/////////////// Фиг.9
