1
Изобретение относится к автоматическим адресователям подвижных объектов и может быть использовано, частности, для адресования передаточных устройств на конвейерных линиях для изготовления железобетонных изделий, в том числе на многоЯрусных конвейерных линиях.
Известно устройство для адресования движущегося объекта, включакнцее исполнительный механизм, соединенный с переключателем и задающим механизмом, выполненным с кулачковым диском, храповым колесом и несущим со-, бачку храпового механизма флажком Ц.
Недостатком известного устройства является низкая надежность в работе и невозможность автоматического, адресования груза.
Цель изобретения - повышение надежности в работе, а также автоматизация процесса поочередного адресования объекта по двум адресам.
Поставленная цель достигается тем, что переключатель выполнен с шарнирно установленным на основании рычагом и тягой,-посредством которой рычаг соединен с флажком задающего механизма, а исполнительный механизм содержит вал и укрепленные на нем
упор, ограничитель угла поворота вала и поводок, взаимодействующий с кулачковым диском, а рычаг переключателя и упор исполнительного механизма - с движущимся объектом.
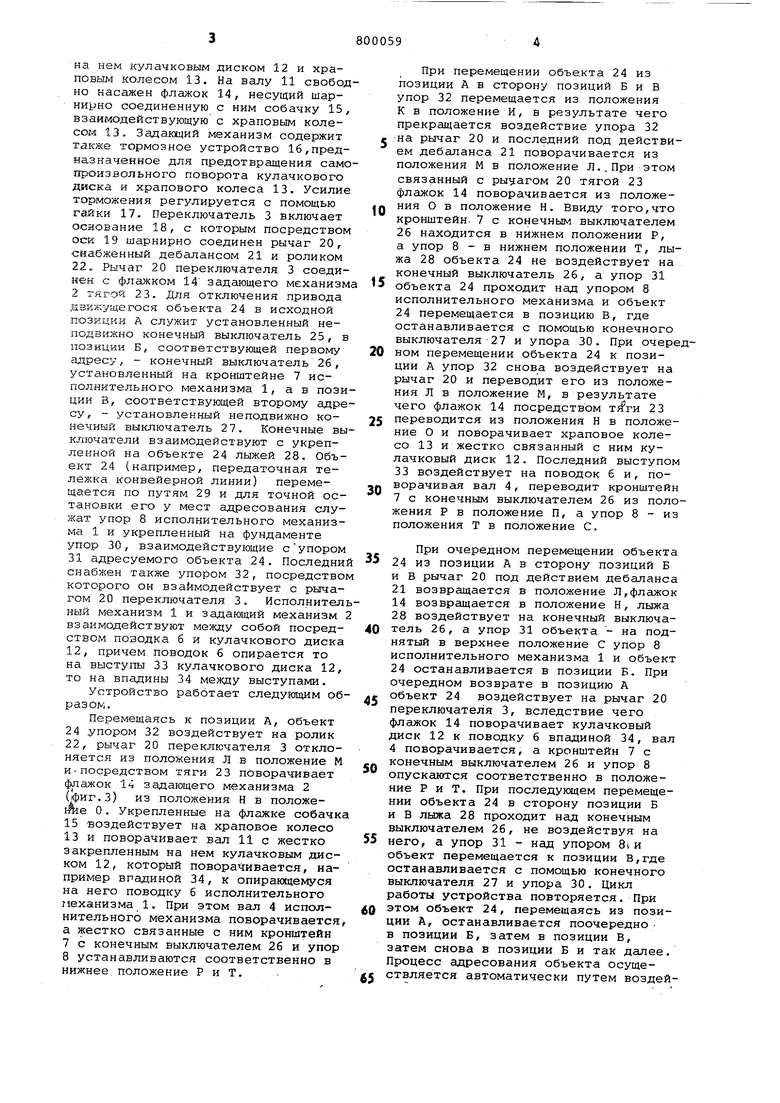
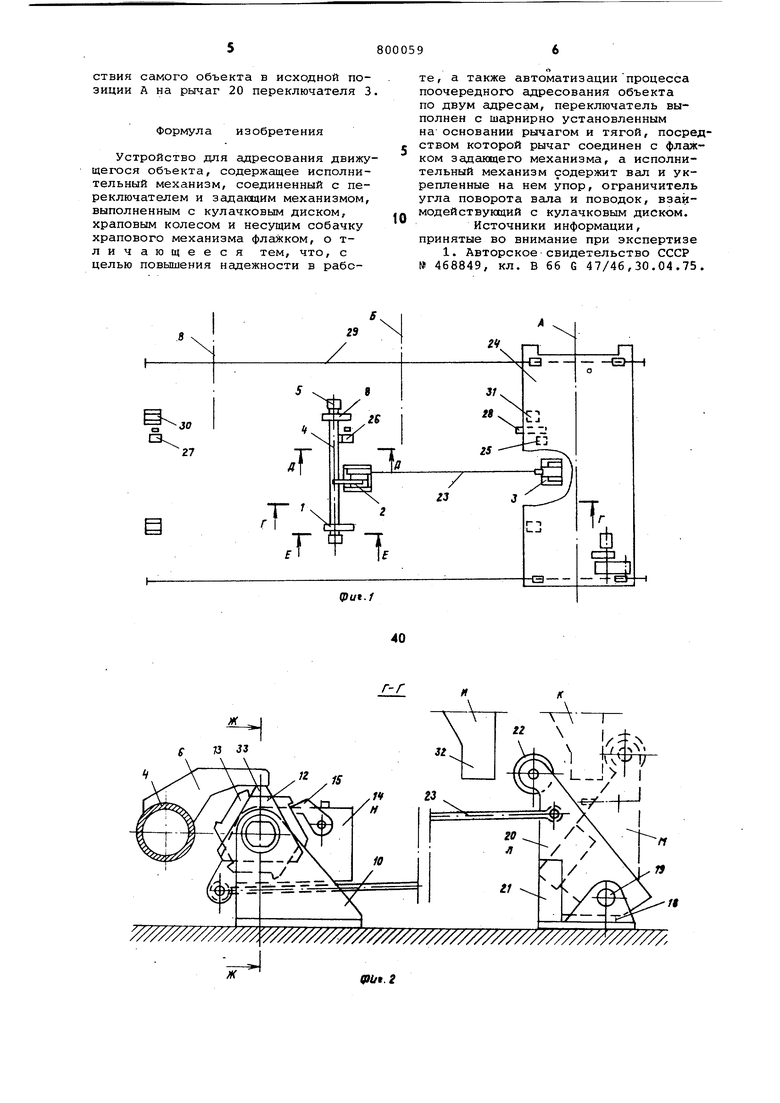
На фиг. 1 изображено устройство для адресования движущегося объекта, внд в плане; на фиг.2 - переключатель, задающий и исполнительный ме0ханизмы, положение которых соответствует адресованию объекта в один из адресов, разрез Г-Г на фиг.1; на фиг. 3 - то же, в момент автоматического переадресования объекта;
5 на фиг. 4 - разрез Ж-Ж на фиг.2; на фиг. 5 - разрез Д-Д на фиг.1; на фиг. 6 - разрез Е-Е на фиг.1.
Устройство для адресования движущегося объекта состоит из трех вза0имодействующих между собой узлов: исполнительного механизма 1, задающего механизма 2 и переключателя 3. Исполнительный механизм 1 выполнен с валом 4, смонтированным в подшип5никах 5, и с жестко укрепленными на валу 4 поводком 6, кронштейном 7, упором 8 и ограничителем 9 угла поворота вала 4. Задающий механизм 2 содержит корпус 10,--, в котором
0 смонтирован вал 11 с укрепленными
на нем кулачковым диском 12 и храповым колесом 13, На валу 11 свободно насажен флажок 14, несущий шарнирно соединенную с ним собачку 15, взаимодействующую с храповым колесом 13. Задающий механизм содержит также тормозное устройство 16,предназначенное для предотвращения самопроизвольного поворота кулачкового диска и храпового колеса 13. Усилие торможения регулируется с помощью гайки 17. Переключатель 3 включает основание 18, с которым посредством оси 19 шарнирно соединен рычаг 20, снабженный дебалансом 21 и роликом 22. Рычаг 20 переключателя 3 соединен с флажком 14 задгиощего механизма 2 гягой 23. Для отключения привода движущегося объекта 24 в исходной позиции А служит установленный неподвижно конечный выключатель 25, в позиции Б, соответствующей первому адресу, - конечный выключатель 26, установленный на кронштейне 7 исполнительного механизма 1, а в позиции В, соответствующей второму адресу, - установленный неподвижно конечный выключатель 27. Конечные выключатели взаимодействуют с укрепленной на объекте 24 лыжей 28. Объект 24 (например, передаточная тележка конвейерной линии) перемещается по путям 29 и для точной остановки его у мест адресования служат упор 8 исполнительного механизма 1 и укрепленный на фундаменте упор 30, взаимодействующие супором 31 адресуемого объекта 24. Последний снабжен также упором 32, посредством которого он взаимодействует с рычагом 20 переключателя 3. Исполнительный механизм 1 и задающий механизм 2 взаимодействуют между собой посредством позодка б и кулачкового диска 12, причем поводок 6 опирается то на выступы 33 кулачкового диска 12, то на впадины 34 между выступами.
Устройство работает следующим образом.
Перемещаясь к позиции А, объект 24 упором 32 воздействует на ролик 22, рычаг 20 переключателя 3 отклоняется из положения Л в положение М и.посредством тяги 23 поворачивает флажок 14 задающего механизма 2 ((фиг.З) из положения Н в положетае О. Укрепленные на флгукке собачка 15 воздействует на храповое колесо 13 и поворачивает вал 11 с жестко закрепленным на нем кулачковым диском 12, который поворачивается, например впадиной 34, к опирающемуся на него поводку 6 исполнительного механизма 1. При этом вал 4 исполнительного механизма поворачивается, а жестко связанные с ним кронштейн
7с конечным выключателем 26 и упор
8устанавливаются соответственно в нижнее положение Р и Т.
При перемещении объекта 24 из позиции А в сторону позиций Б и В упор 32 перемещается из положения К в положение И, в результате чего прекращается воздействие упора 32 на рычаг 20 и последний под действием дебаланса 21 поворачивается из положения М в положение Л..При этом связанный с рычагом 20 тягой 23 флажок 14 поворачивается из положения О в положение Н. Ввиду того,что кронштейн. 7 с конечным выключателем 26 находится в нижнем положении Р, а упор 8 - в нижнем положении Т, лыжа 28 объекта 24 не воздействует на конечный выключатель 26, а упор 31 объекта 24 проходит над упором 8 исполнительного механизма и объект 24 перемещается в позицию В, где останавливается с помощью конечного выключателя-27 и упора 30. При очереном перемещении объекта 24 к позиции А упор 32 снова воздействует на рычаг 20 и переводит его из положения Л в положение М, в результате чего флажок 14 посредством 23 переводится из положения Н в положение О и поворачивает храповое колесо 13 и жестко связанный с ним кулачковый диск 12. Последний выступом 33 воздействует на поводок 6 и, поворачивая вал 4, переводит кронштейн 7 с конечным выключателем 26 из положения Р в положение П, а упор 8 - из положения Т в положение С.
При очередном перемещении объекта 24 из позиции А в сторону позиций Б и в рычаг 20 под действием дебаланса 21 возвращается в положение Л,флажок 14 возвращается в положение Н, лыжа 28 воздействует на конечный выключатель 26, а упор 31 объекта - на поднятый в верхнее положение С упор 8 исполнительного механизма 1 и объект 24 останавливается в позиции Б. При очередном возврате в позицию А объект 24 воздействует на рычаг 20 переключателя 3, вследствие чего флажок 14 поворачивает кулачковый диск 12 к поводку 6 впадиной 34, вал 4 поворачивается, а кронштейн 7 с конечным выключателем 26 и упор 8 опускаются соответственно в положение Р и Т. При последующем перемещении объекта 24 в сторону позиции Б и В лыжа 28 проходит над конечным выключателем 26, не воздействуя на него, а упор 31 - над упором 8уИ объект перемещается к позиции В,где останавливается с помощью конечного выключателя 27 и упора 30. Цикл работы устройства повторяется. При этом объект 24, перемещаясь из позиции А, останавливается поочереднов позиции Б, затем в позиции В, затем снова в позиции Б и так далее. Процесс адресования объекта осуществляется автоматически путем воздействия самого объекта в исходной позиции А на рычаг 20 переключателя 3.
Формула изобретения
Устройство для адресования движущегося объекта, содержащее исполнительный механизм, соединенный с переключателем и задаквдим механизмом, выполненным с кулачковым диском, храповым колесом и несущим собачку храпового механизма флажком, о тличающееся тем, что, с целью повышения надежности в работе, а также автоматизации процесса поочередного адресования объекта по двум адресам, переключатель выполнен с шарнирно установленным на основании рычагом и тягой, посредством которой рычаг соединен с флажком задающего механизма, а исполнительный механизм содержит вал и укрепленные на нем упор, ограничитель угла поворота вала и поводок, взаимодействующий с кулачковым диском.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 468849, кл. В 66 G 47/46,30.04.75
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| АВТОМАТ ДЛЯ МОНТАЖА ТЕЛА НАКАЛА ЭЛЕКТРИЧЕСКИХ ЛАМП НАКАЛИВАНИЯ | 1972 |
|
SU343322A1 |
| Устройство для адрессования грузов | 1971 |
|
SU443823A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1980 |
|
SU889226A1 |
| Устройство для счета предметов,переносимых конвейером | 1986 |
|
SU1361596A1 |
| Адресователь грузового подъемника | 1977 |
|
SU673573A1 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| Устройство для открывания переплетов | 1981 |
|
SU1006671A1 |
| Адресователь для грузов | 1983 |
|
SU1146261A1 |
(Put.f
/
Z3
У///////////////////////
ж
9Ut.2
77/У///////////////////////////////////////////////////
