1
Изобретение относится к оборудованию складов, в частности к грузоподъемным площадкам кранов-штабелеров.
Известна грузоподъемная площадка крана-штабелера, содержащая раму с неподвижно установленными на ней телескопическими грузозахватами
Однако такие площадки могут работать только с одним типоразмером тары.
Известна также грузоподъемная площадка крана-штабелера, содержащая раму с телескопическими грузозахватами, снабженными механизмами выдвижения приводной винтовой вал, на котором установлена с возможностью возвратно-поступательного перемещения каретка, связанная с телескопическими грузозахватами, и электромагнитные муфты, связанные с кареткой 2,
Недостатком известной площадки является необходимость установки дополнительных индивидуальных приводов выдвижения захватов.
Цель изобретения - упрощение конструкции путем исключения индивидуальных приводов выдвижения захватов .
Указанная цель достигается тем, что электромагнитные муфты смонтированы на приводном винтовом валу и снабжены поводками, при этом поводок одной из муфт жестко закреплен на.каретке, а поводки других муфт снабжены прикрепленными к ним шестернями, связанными с механизмами выдвижения захватов.
На фиг. 1 схематически изображен кран-штабелер, общий вид; на фиг.2 неподвиный телескопический захват,
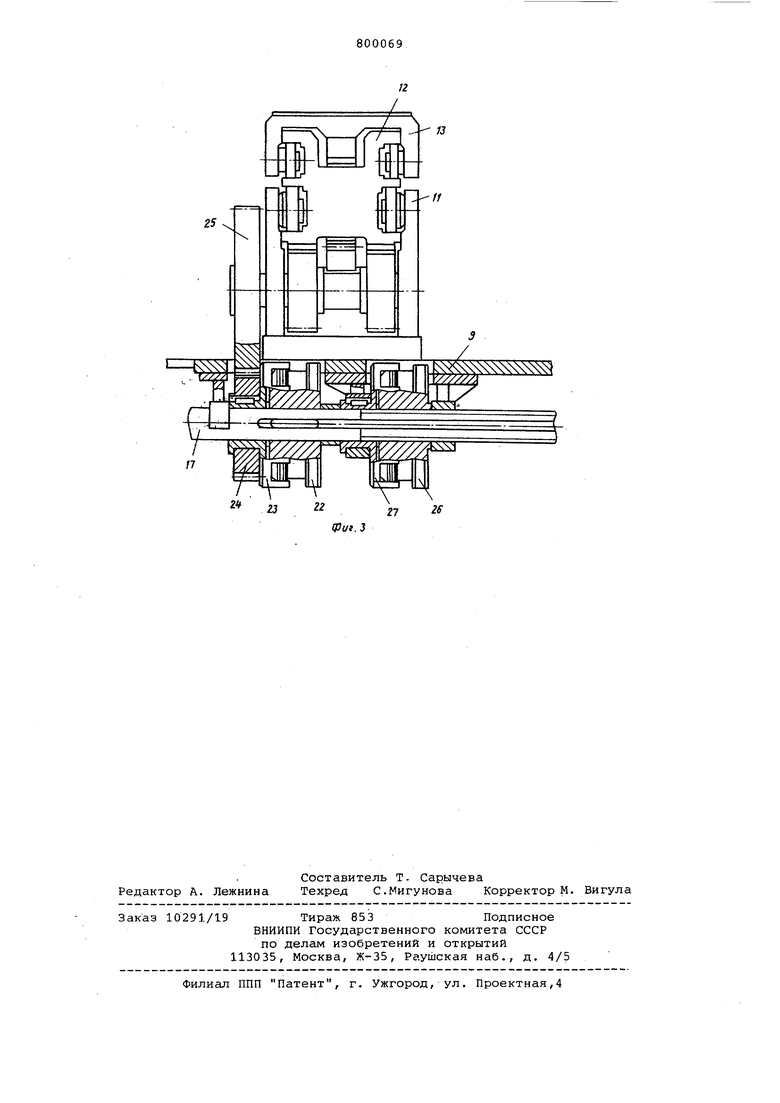
& на фиг. 3 - подвижный захват.
. Стеллажный кран-штабелер содержит приводную тележку 1, которая установлена колесами 2 на подкрановом рельсе З..На тележке 1 жестко закреплена вертикальная колонна 4. На направляющих 5 колонны 4 смонтирован с возможностью вертикального перемещения грузоподъемник 6,снабженный площадкой 7, на которой смонтированы неподвижный телескопический захват 8 и подвижная каретка 9 с телескопическим захватом 10. Телескопические захваты 8 и 10 выполнены в виде неподвижного основания 11, подвижной промежуточной секции 12 и верхней платформы 13. Редуктор
14, расположенный на грузоподъемнике 6, кинематически связан через выходной вал 15 и зубчатую передачу 16 с приводным валом 17, на котором смонтированы первая электромагнитная муфта 18, на поводке 19 которой закреплена шестерня 20,находящаяся в постоянном зацеплении с рубчатым колесом 21 неподвижного телескопического захвата 8, вторая электромагнитная муфта 22, на поводке 23 которой закреплена шестерня 24 находящаяся в постоянном зацеплении с зубчатым колесом 25 подвижного телескопического захвата 10 , третья электромагнитная муфта 26, поводок 27 которой жестко связан с подвижной кареткой 9, а корпус соединен с приводным валом 17 с помощью винтового соединения, образованного корпусом муфты 26 и резьбовым концом приводного вала 17.
Устройство работает следующим образом.
Кран-штабелер позволяет производить выдвижение верхней платформы телескопических захватов в стеллаЖ и разведение или сведение телескопических захватов в зависимости от типоразмеров складируемой тары от одного вала без механических переключений .
В случае необходимости выдвижения верхней платформы 13 телескопических захватов 8 и 10 в стеллаж, замыкают электромагнитные муфты 18 и 22, а электромагнитную муфту 26 обёсточиBcuoT. При этом вращение от редуктора 14 через выходной вал 15 и зубчатую передачу 16 передается на приводной вал 17. и корпусы электромагнитных муфт 18 и 22. Так как при замкнутых электромагнитных муфтах 18 и 22 поводки 19 и 23 вращаются одновременно с корпусами муфт, то вращение передается через шестерни 20 и 24 соответственно на телескопические захваты 8 и 10, и их верхние платформы 1 выдвигаются в стеллаж. : Направление выдвижения верхних ;платформ 13 зависит от направления вращения выходного вала 15. Корпус обесточенной электромагнитной муфты 26 свободно поворачивается отнрсительно поводка 27, не оказывая кикакого действия на подвижную 9.
В случае необходимости разведения или сведения телескопических захватов 8 и 10 на заданное расстояние, зависящее от габаритов складируемой тары, замыкают электромагнитную муфту 26, а электромагнитные муфты 18 и 22 обесточивают. В этом случае вращение от редуктора 14 передается на приводной вал 17 и не передается на шестерни 20 и 24, так как при обесточенных электромагнитных муфтах 18 и 22 поводки 19 и 23 свободно поворачиваются относительно кор,пусов ЭТИХ муфт. Корпус электромаг:нитной муфты 26 становится неподвижным относительно поводка 27, т.е. неподвижным относительно подвижной каретки 9, а так как корпус электромагнитной муфты 26 преобразован в гайку, а конец приводного вала 17 в винт, то вращательное движение вала 17 преобразуется в возвратнопоступательное движение гайки, т.е. подвижной каретки 9.
В зависимости от направления вращения выходного вала 15 редуктора 1 происходит сдвижение или раздвижение телескопического захвата 10 на необходимое расстояние.
Формула изобретения
Грузоподъемная площадка кранаштабелера, содержащая раму с телескопическими грузозахватами, снабженными механизмами вьщвижения, приводной винтовой вал, на котором установлена с возможностью возвратно-поступательного перемещения каретка, связанная с телескопическими грузозахватами, и электромагнитные муфты, связанные с кареткой, о тличающаяся тем, что, с целью упрощения конструкции путем исключения индивидуальных приводов выдвижения захватов, электромагнитные муфты смонтированы на приводном винтовом валу и снабжены поводками, при этом поводок.одной из муфт жестко закреплен на каретке, а поводки других муфт снабжены прикрепленными к ним шестернями, связанными с механизмами выдвижения захватов. Источники информации, принятые во внимание при экспертизе
1.Зерцалов А.И., Певзнер Б.И. Краны-штабелеры. М., Машиностроение, 1974, с. 47-48.
2.Авторское свидетельство СССР 420523, кл. В 65 G 57/10, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Транспортно-накопительная система | 1989 |
|
SU1747352A1 |
| Грузоподъемная площадка крана штабелера | 1985 |
|
SU1315367A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |

Я
Z1
20
a
п
25
П
