камер 4 и 5 выбраны из расчета получения требуемой грузоподъемности захвата, усилия захвата, а также величины подъема груза.
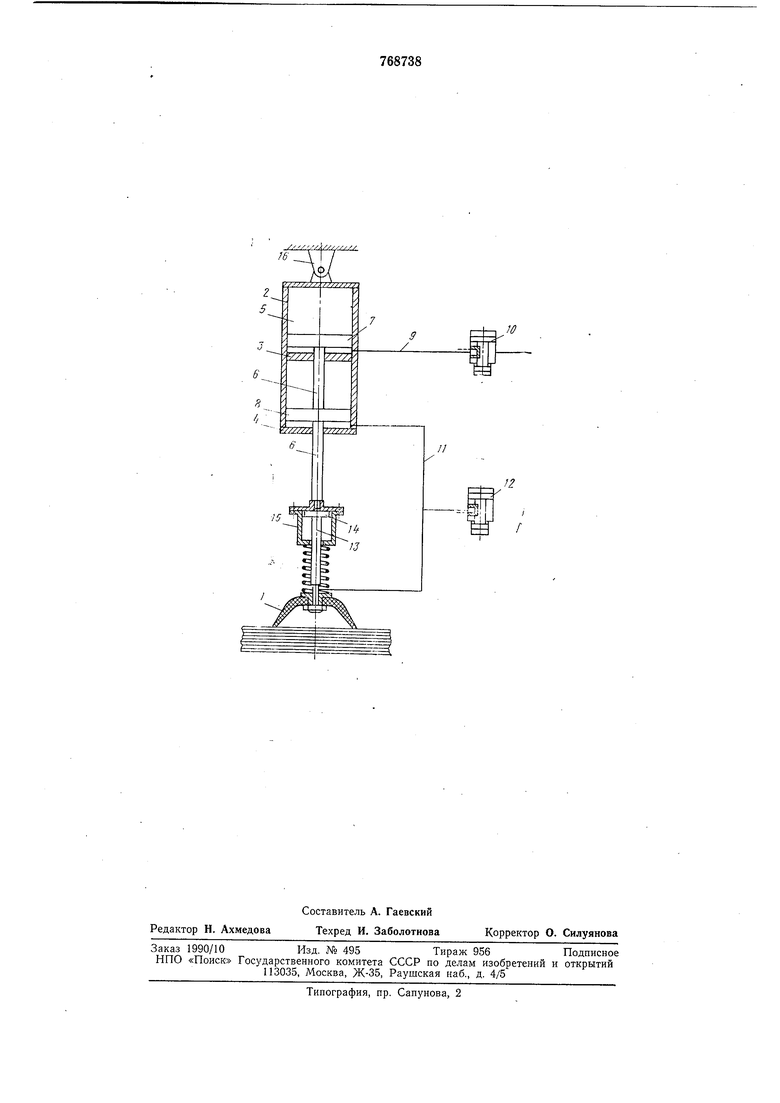
Корпус 2 шарпирно подвешен к рабочему органу механизма перемещения 16.
Устройство работает следующим образом.
В Исходном полОЖейий зОлотиик 10 отключен, и сжатый воздух в поднорщневое пространство камеры 5 не поступает. При этом порщень 7, подвешенный на штоке 6 системы, под действием собственного веса или под действием давления в надпоршневое пространство камеры 5 опускается, стержень 13 с подвешенным на нем присосом 1 находится в нижнем положении, буртик 14 его лежит на дне стакана 15. При касании уплотнительным присосом 1 груза стержень 13 останавливается, а стакан 15 перемещается до касания буртиком крышки стакана 15 при этом присос 1 прижимается к поверхности груза. Воздух из иодпоршневой полости камеры 4 и полости присоса 1 выходит в атмосферу через золотник 12. При переключении золотников 10 и 12 сжатый воздух поступает через золотинк 10 в иодпоршневую полость камеры 5, а канал 11 отключается от атмосферы.
При этом поршень 7 поднимается, увлекает через шток 6 поршень 8, вследствие чего в рабочей-камере 5 создается вакуум, достаточный для захвата груза, стакан 15 перемещается вдоль стерл :ня 13, не поднимая его, а груз захватывается уплотнительным кольцом 1.
При дальнейшем подъеме поршня 7 буртик 14 и дно стакана соприкасаются и осуществляется подъем груза. Увеличением усилия захвата груза при дальнейшем перемещении поршней 7 и 8 компенсируют уменьшение вакуума вследствие утечек. После транспортировки груза золотиик 12 переключается, и вакуумная иолость соединяется с атмосферой, ири этом груз освобождается от захвата.
Такая конструкция захвата позволяет использовать для захвата и подъема груза одии привод.
Формула изобретения
Вакуумное захватное устройство, содержащее цилнидрический кориус, разделенный перегородкой на рабочую и вспомогательиую камеры, в которых иа общем штоке установлены иорщни, источиик сжатого воздуха, соединенный с подпоршневой полостью вспомогательной камеры, вакуумный присос, полость которого соединена с подпоршневой полостью рабочей камеры, и механизм перемещения корпуса, отличающееся тем, что, с целью повышения эффективности его в работе, оно снабжено закрытым стаканом, закрепленным на нижнем конце штока, и стержнем, на одном конце которого закреплен вакуумный присос, а другой подвижио установлен в полость стакапа, при этом иа стержне между стаканом и присосом установлена пружина сжатия.
Источники информации, принятые во внимание ири экспертизе
1.Авторское свидетельство СССР № 185035, кл. В 66С 1/02, 26.07.65.
2.Авторское свидетельство СССР № 254741, кл. В 66С 1/02, 26.06.68 (прототип).
w
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373666A1 |
| Присосное устройство для швартовки судна | 1983 |
|
SU1092088A1 |
| УСТАНОВКА ДЛЯ ОЧИСТКИ ИЗДЕЛИЙ | 1991 |
|
RU2035246C1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373667A1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |
| Вакуумный захват | 1978 |
|
SU738980A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Лебедка | 1982 |
|
SU1301770A1 |
| ГИДРОПНЕВМАТИЧЕСКИЙ УПРУГИЙ ЭЛЕМЕНТ | 2007 |
|
RU2338647C1 |
| Вакуумный захват | 1981 |
|
SU1020346A1 |