(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Захватное устройство для контейнеров | 1978 |
|
SU715433A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1996 |
|
RU2099921C1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| Грузозахватное устройство | 1979 |
|
SU867842A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
I
Изобретение относится к грузозахватным устройствам, предназначенным, в частности, для захвата грузов под основание.
Известно грузозахватное устройство, содержащее несущую раму, установленные на ней с возможностью поворота захватные лапы и привод захватных лап, выполненный в виде траверсы и механизма фиксации, соединенного с поворотными лапами рычагами и цепной передачей 1.
Наиболее близким к описываемому изобретению является грузозахватное устройство, содержащее несущую раму, установленные на ней с возможностью поворота захватные лапы,и привод захватных лап 2.
Недостатком устройства является сложность конструк1даи из-за наличия в нем гидравлического привода с моментными гидроцилиндрами.
Целью изобретения является упрощение конструкции устройства.
Поставленная цель достигается тем/ что привод включает эластичные рукава, каждый из которых закреплен на направляющей, имеющей форму дуги окружности, н соединен с источНИКОМ давления рабочего тела, а на каждой захватной лапе на радиусе дуги окружности закреплен ролик, взаимодействующий со стенкой рукава.
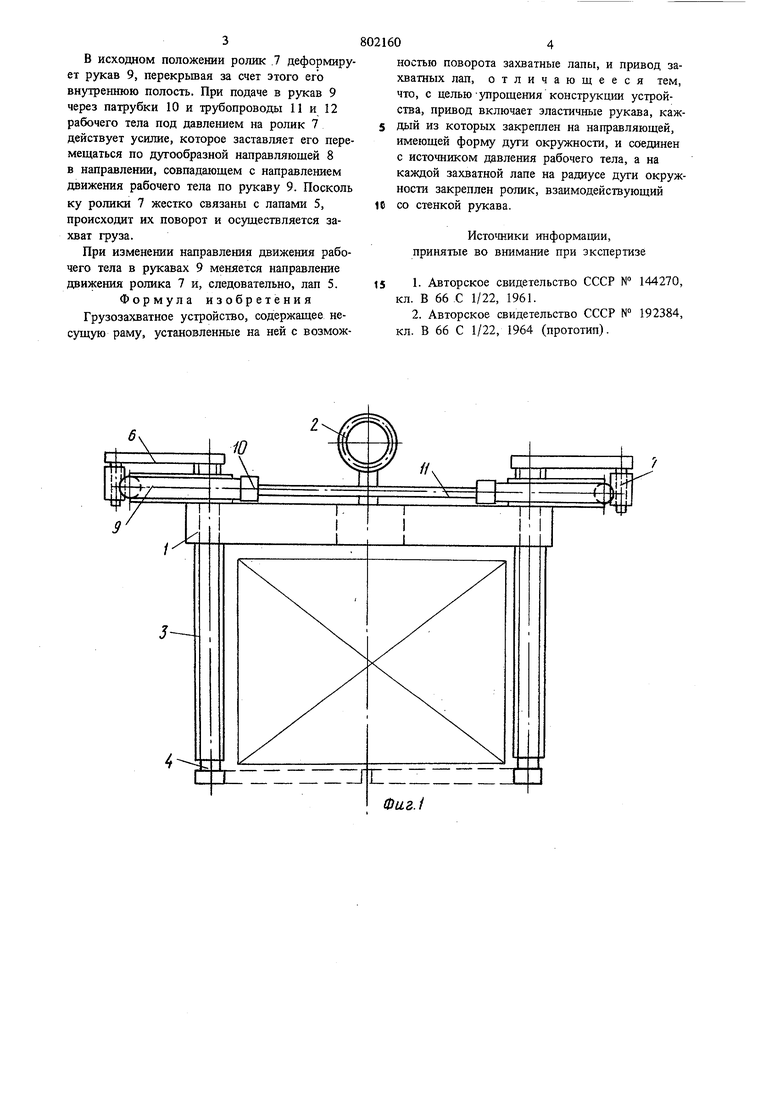
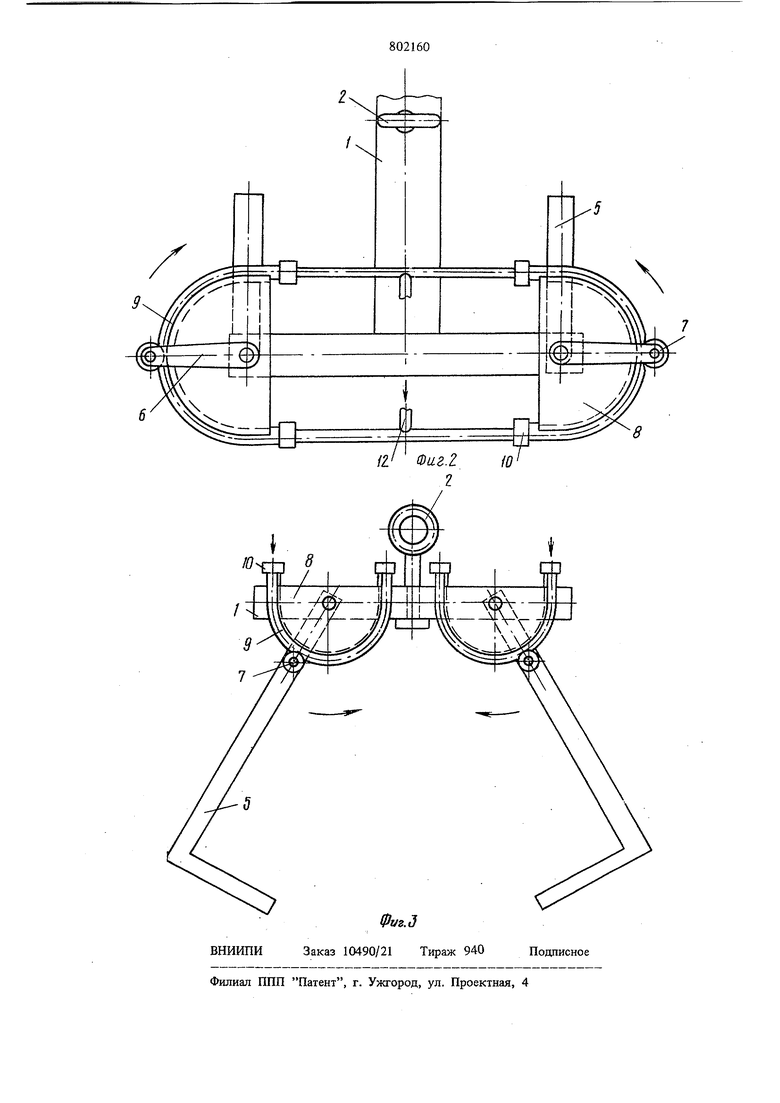
На фиг. 1 показан вид устройства сбоку; на фиг. 2 - вид сверху; на фиг. 3 вариант устройства с рукавами, расположенными в вертикальной плоскости.
Грузозахватное устройство состоит из несущей рамы 1, снабженной серьгой 2 для навещивания устройства на крюк крана. На раме закреплены вертикальные стойки 3, в каждой из которых установлен вал 4 с захватной лапой 5. На верхнем конце каждого вала 4 посредством кронштейна 6 закреплен ролик 7. На раме 1 на направляющих 8 с дутоофазной внеишей иоверхностью закреплены рукава 9, соединенные с источником давления рабочего тела патрубками 10 и трубопроводами 11 и 12.
При расположении рукавов 9 в вертикальной плоскости (фиг. 3) ролик 7 крепится непосредственно в вертикальной части захватной лапы 5.
Устройство работает следующим образом.
В исходном положении ролик .7 деформирует рукав 9, перекрьшая за счет этого его внутреннюю полость. При подаче в рукав 9 через патрубки 10 и трубопроводы 11 и 12 рабочего тела под давлением на ролик 7 действует усилие, которое заставляет его перемещаться по дугообразной направляющей 8 в направлении, совпадающем с направлением движения рабочего тела по рукаву 9. Посколь ку ролики 7 жестко связаны с лапами 5, происходит их поворот и осуществляется захват груза.
При изменении направления движения рабочего тела в рукавах 9 меняется направление движения ролика 7 и, следовательно, лап 5. Формула изобретения
Грузозахватное устройство, содержащее несущую раму, установленные на ней с возможностью поворота захватные лапы, и привод захватных лап, отличающееся тем, что, с целью-упрощения конструкции устройства, привод включает эластичные рукава, каждый из которых закреплен на направляющей, имеющей форму дуги окружности, и соединен с источником давления рабочего тела, а на каждой захватной лапе на радиусе дуги окружности закреплен ролик, взаимодействующий
со стенкой рукава.
Истчккки информации, принятые во внимание при экспертизе
