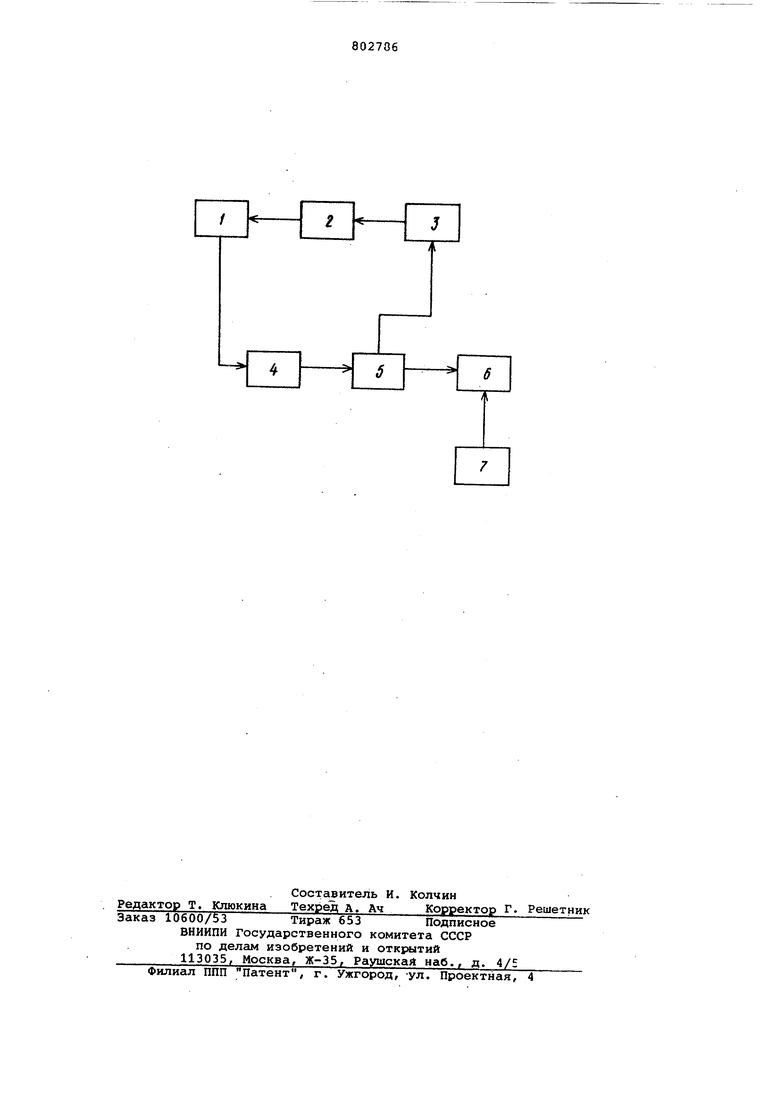
Изобретение измерений с помощью приборов, основанных на использовании гироскопического эффекта с использованием магнитного поля. Известны системы электромагнитно подвески ферромагнитных тел, содержащие электромагнитный датчик положения, блок регулирования тока и блок демпфирования l . Недостатками таких систем являют ся их громоздкость, малое быстродей ствие, малый запас устойчивости и зависимость динамических свойств от положения подвешиваемого тела. Наиболее близким к изобретению по существу технического решения является устройство для электромагнитной подвески ферромагнитных тел, содержащее источник задающего напряжения и последовательно соединенные блок сравнения, усилитель, электромагнит и датчик положения подвешиваемого тела 2 . Недостатком этого устройства явл ется то, что область притяжения к положению равновесия относительно невелика, невелик также и диапазон возможных перемещений подвешиваемого тела. Все это существенно снижает надежность устройства. Цель изобретения - повышение надежности устройства путем расширения области устойчивости и диапазона перемещения подвешиваемого тела. Это достигается тем, что в устройство между датчиком положения подвешиваемого тела и блоком сравнения введены последовательно соединенные блок многократного дифференцирования, второй выход которого соединен с блоком сравнения, и блок задания значения степени производной сигнала, второй вход которого соединен с источником задающего напряжения. На чертеже представлена структурная схема устройства. Оно содержит электромагнит 1, усилитель 2, блок сравнения 3, датчик 4 положения подвешиваемого тела, блок 5 многократного дифференцирования, блок 6 задания значения степени производной сигнала, источник задающего напряжения 7. Источник задающего напряжения 7, блок б задания степени производной сигнала, блок сравнения 3, усилитель 2, электромагнит 1, датчик 4 положения подвешиваемого тела и блок 5 многократного дифференцирования, выходы которого соединены с блоком 6 задания степени производной сигна ла и с блоком сравнения 3, соединены последовательно. Устройство работает следующим об разом. Если подвешиваемое тело находится в одном устойчивом положении, то при появлении задающего сигнала на выходе блока 7 и сигнала рассогласования на выходе блока сравнения 3, который усиливается усилителем 2 и поступает на электромагнит 1, создается тяговое усилие и подвешиваемое тело перемещается в другое (верхнее) устойчивое положение. Причем, в настоящем устройстве реал зуется принцип управления по старшей производной. В данном случае старшей производной является третья производная перемещения подвешиваемого тела, поскольку математическая модель имеет третий порядок. Желаемые динамические свойства устройства задаются блоком б, формирующим желаемое значение старшей (третьей) производной как функции перемещения подвешиваемого тела, его скорости и, ускорения (например, . в виде линейной комбинации). Прояление внутренних и внешних возмущений (нестационарность нагруз ки, статические и динамические нелинейности электромагнита, их температурная нестабильность и пр). в этой системе локализуется в быстродействующем контуре поддерживания желаемого значения старшей производной, и этим самым обеспечивается значительное расширение области устойчивости и рабочего диапазона возможных перемещений подвешиваемого ферромагнитного тела. Пусть динамика электромагнитного подвеса описывается следующими уравнениями:и--ЗК--М---| Ч(Ъ-х) fg--C4 --vnx 4ir,q-- Fg(t)2a (b-Xi) j--2VgR(b-x,)((tVFB(tr Х,,ч-2 if- Vx,,c 4ni-Fg,(t)U f()+B(
де Х - выходная величина перемещения подвешиваемого ферромагнитного тела;
и - напряжение, прикладываемое к обмотке электромагнита; I - ток;40
R - активное сопротивление обмотки;
Ф - потокосцепление;
т - масса подвижной части системы;65электромагнитное тяговое усилие; время; силовое возмущение; ,b, с конструктивные постоянные; Зависимость функций f и В от t ражает действие сигнальных и раметрических возмущений. Как следует из системы уравнений ), устройство характеризуется начием существенных нелинейностей использование известных способов ррекции по, х их здесь обеспечиет весьма малую область притяжея к положению равновесия. Пусть задана математическая моль желаемых динамических свойств стемы в виде N- 2V- 3S --((x(t)- f, .I, е Т - желаемое быстродействие; В - постоянные коэффициенты (выбираются по диаграмме Вышнеградского ); программа изменения предписанного значения (Х°) выходной величины желаемое значение старшей производной; Для подчинения движения системы равнения (2) организуем следующий горитм управления: и кл к X е К - коэффициент усиления; Д - сигнал рассогласования; ) измеренное значение старшей производной; ф (А1р)-( -f/Jb.pn--) - передаточная функция блока многократного дифференцирования;fj( - малый параметр, определяющий инерционность процессов реального дифференцирования}Ь Ь2 3 С учетом выражений (1), (2) и З) составим полную систему уравнеий:Если устремить , то Wф(() и мы получаем подсистему медленных движений V - В (Xii)K р, о х. J г,-., 1 i 1tBt t) () При достаточно большом значении K(K 207lOO) /,,(x,X)-X5. Для вьщеления быстрых движений введем время t-. обозначив, Z(t) X3(t)., Тогда уравнения для Z и примут вид ,У.,, (+B(A.T,x,,XJ-V,,3(K4FCY,xV-v/$Cc ,-.,-«,14, Устремляя , в итоге получим Подсистему быстрых движений |Х ---БКХ(суПч- -ЪкР , %-( (q,-) , ( н, con-bt -const, Б-const, F-co ie-bВ данном случае не учитывается малая интерционность датчика полож ния. Если эта инерционность больше /J , то необходимо либо корректировать контур быстрых движений, либр формировать алгоритм управления по четвертой производной выходной величины. Зная из уравнений (1) диапазон изменения В(х t) в рабочей области прост Ьанства состояний Б ()--2-/i--V)), можно определить значение К таким образом, чтобы система обладала за данным запасом устойчивости. УравненияYV (p) описывают процессы в блоке 5 и поэтому не могут качественно повлиять на основные быстрые движения в контуре поддержания производной имеет место в том случае, когда выполняются неравенства (условия разделения движений по/;) , Ю/ Тдддд.ун где Т - минимальное значение постоянной времени электромагнитного подвеса. Таким образом, предложенное устройство позволяет расширить область устойчивости и диапазон перемещений подвешиваемого тела. Формула изобретения Устройство для электромагнитной подвески ферромагнитных тел, содержащее источник задающего напряжения и последовательно соединенные блок сравнения, усилитель, электромагнит и датчик положения подвешиваемого тела, отличающееся гем, что, с целью повышения надежности устройства путем расширения области устойчивости и диапазона перемещения подвешиваемого тела, в него между датчиком положения подвешиваемого тела и блоком сравнения введены последовательно соединенные блок многократного дифференцирования, второй выход которого соединен с блоком сравнения, и блок задания значения степени производной сигнала, второй вход которого соединен с источником зада1ющего напряжения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 435384, кл. F 16 С 39/06, 1976. 2.Авторское свидетельство СССР № 418732, кл. G 01 С 19/24, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электропривод | 1984 |
|
SU1244780A1 |
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Устройство для управления вибровозбудителем | 1984 |
|
SU1176309A1 |
| Устройство для управления линейным электродвигателем постоянного тока | 1979 |
|
SU855916A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Устройство для управления вибровозбудителем | 1981 |
|
SU1012064A1 |
| Система управления вибратора | 1986 |
|
SU1315936A1 |