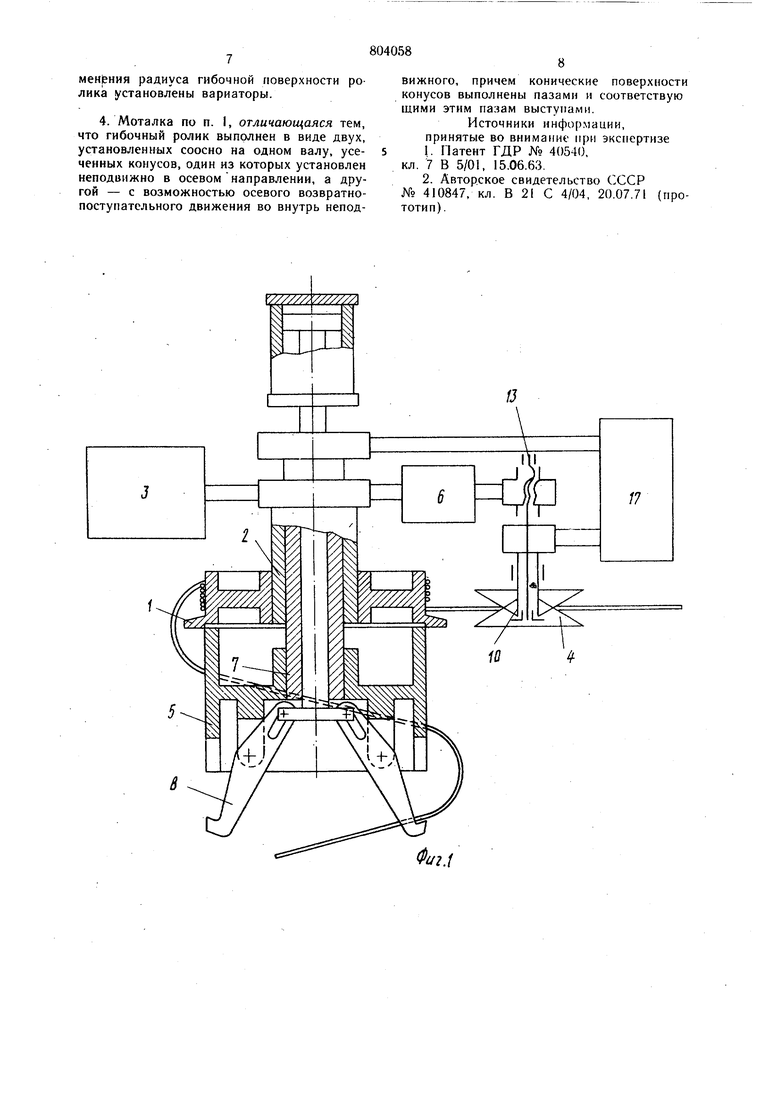
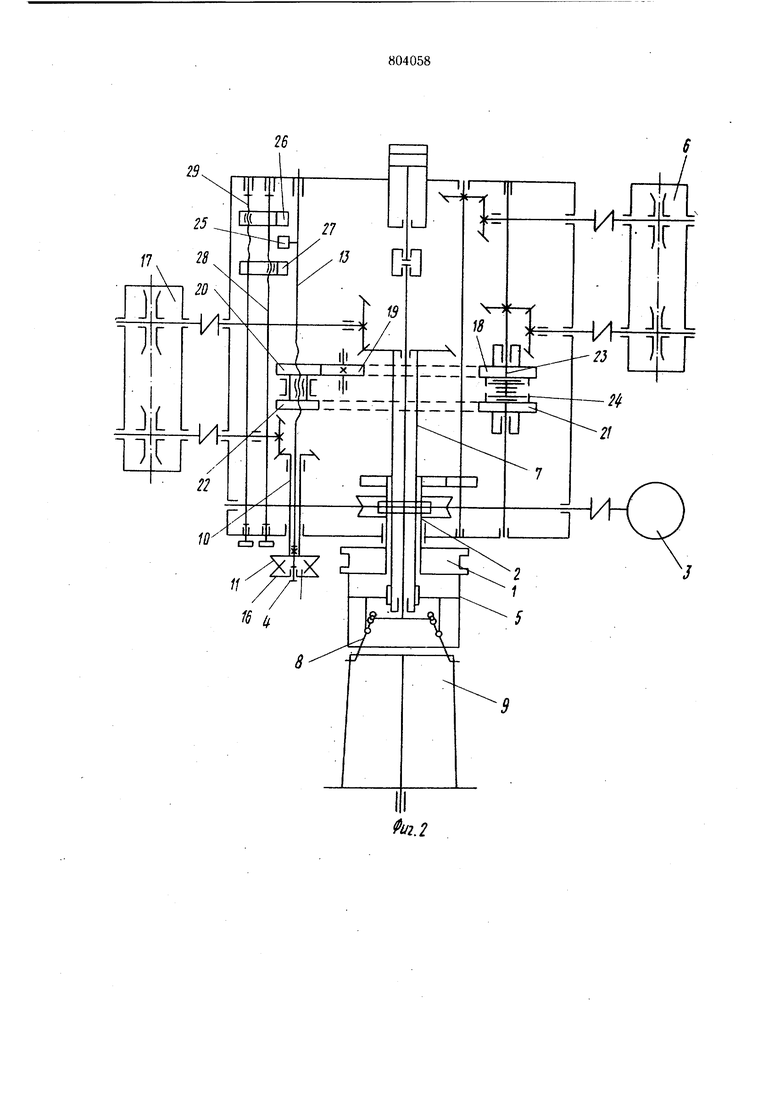
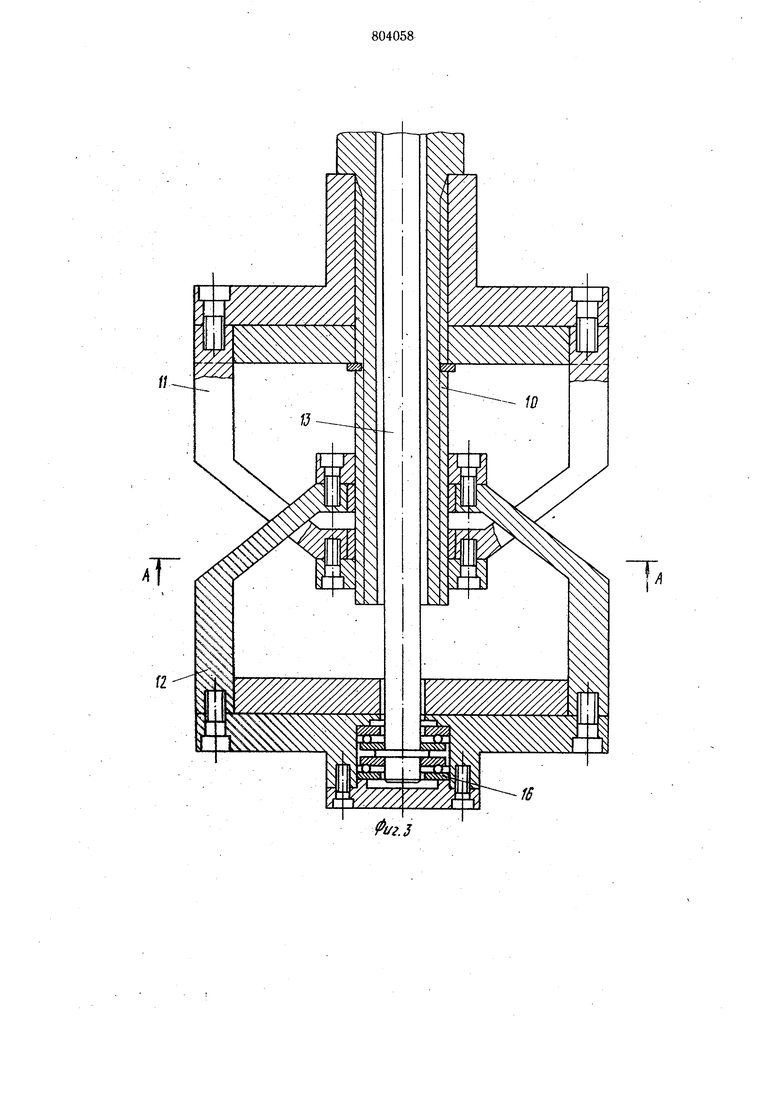
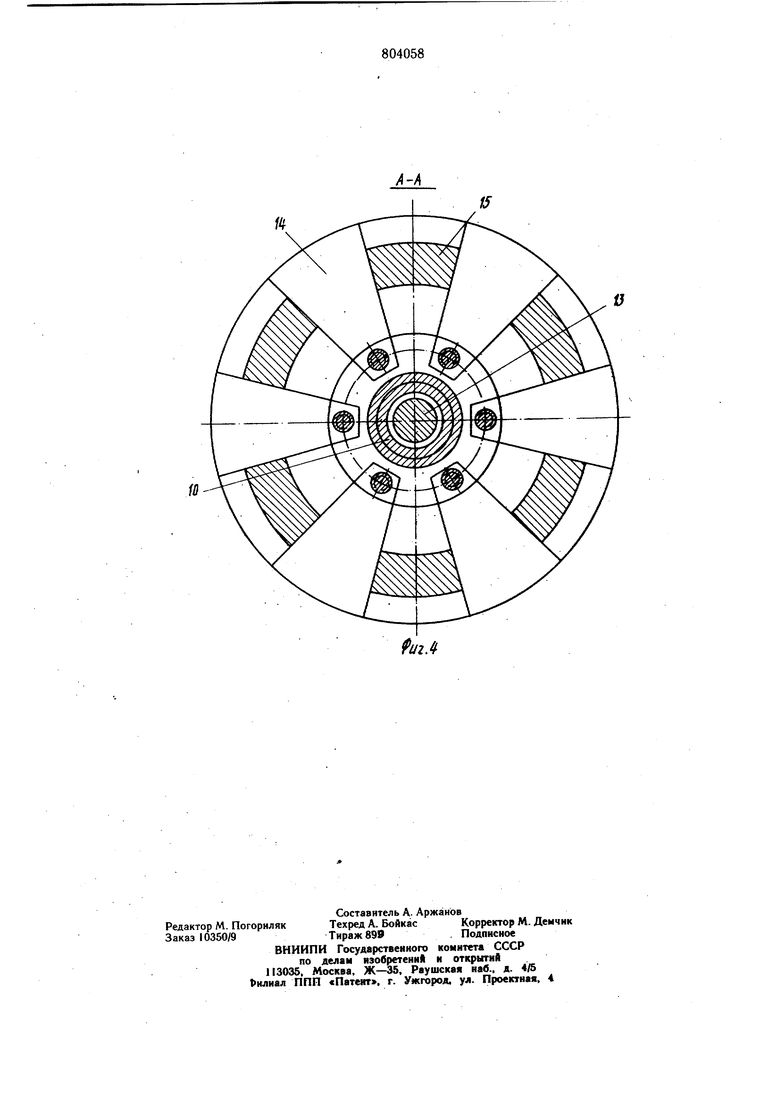
(54) МОТАЛКА КОМ, а также гибочный ролик с наполнителем, телем 3 регуляторе скорости изменения радиуса гибочной поверхности ролика установле ны Ьариаторы. ибoчный ролик выполнен в виде двух установленных соосно на одном валу усеченных конусов, один из которых установлен неподвижно в осевом направлении, а другой - с возможностью осевого возвратно-поступательного движения во внутрь неподвижного, причем конические поверхноти конусов выполнены с пазами и соответствующим этим пазам выступами. На фиг. 1 показана моталка, обш.ий вид с частичным разрезом; на фиг. 2 - кинематическая схема моталки; на фиг. 3 - гибоч|Н1|1Й ролик, разрез; на фиг. 4 - разрез А--А нц фиг. 3. Моталка содержит вытяжной барабан 1 (фиг. I, 2), закрепленный на вертикальном полом валу 2 с возможностью вращения от привода 3, механизм для укладки в мотки проволоки по спирали Архимеда, состоящий из гибочного ролика 4, накопительного барабана 5, регулятора скорости изменения радиуса гибочной поверхности ролика 4 и выбора диапазона гибки, включающего в себя вариатор б (фиг. 1, 2) и передачу с реверсивным механизмом, связывающую вытяжной барабан I с гибочным роликом 4, а также гибочный ролик 4 с накопительным барабаном 5 (фиг. 2). Накопительный барабан 5 закреплен соосно с барабаном 1 на полом валу 7 с возможностью вращения от гибочного ролика 4. Накопительный барабан 5 связан посредством рычагов 8 (фиг. 1,2) со свободновращающейся съемной фигуркой (накопителем) 9 (фиг. 2). Гибочный ролик 4 закреплен на щлицевом полом вертикальном валу 10 (фиг. 1, 9) с возможностью вращения от протягиваемой вокруг его гибочной поверхности проволоки. Для обеспечения возможности гибки проволоки по спирали Архимеда, рабочая поверхность гибочного ролика 4 выполнена с переменным радиусом; кривизны вдоль образующей и состоит из двух усеченных конусов 11, 12 (фиг. 3), взаимно вдвигаемых и раздвигаемых относительно друг друга при помощи винта 13, расположенного в полости вала 10. Для взаимного проникновения усеченных конусов 11,12 друг в друга на их конических поверхностях выполнены соответствующие пазы 14 и конические выступы 15 (фиг. 4). Конусы П, 12 установлены на валу 10 так что выступы 15 одного из них заходят в пазы 14 другого и наоборот, благодаря чему обеспечивается непрерывность контакта подвергаемой гибке проволоки с гибочной поверхностью ролика 4 при дви жении одного конуса относительно другого Размеры ролика 4, определяющие диапа30 i возможных радиусов гибки .на нем про волоки, принимают с таким расчетом, чтобы деформированные на нем витки проволоки после снятия с них деформационной нагрузки в свободном состоянии имели радиусы остаточной кривизны, соответственно равные внутреннему, наружному и промежуточным значениям диаметра мотка. Экспериментальными исследованиями установлено, что отнощение радиуса остаточной кривизны при гибке стальной проволоки к радиусу гибки колеблется в пределах от четырех до пяти. При необходимости гибочные поверхности составных частей ролика 4 могут быть выполнены сферическими, вогнутыми или выпуклыми, а также с другими криволинейными поверхностями. Верхний конус 11 ролика 4 закреплен на валу 10 неподвижно, а нижний 12 с возможностью осевого возвратно-поступательного движения от винта 13. Винт 13 соединен с подвижным конусом 12 ролика 4 подшипниковой пятой 16. Винт 13 установлен в направляющих корпуса моталки с возможностью осевого движения с приводом от вытяжного барабана 1. В кинематической цепи, связывающей гибочный ролик 4 с накопительным барабаном 5, установлен вариатор 17, позволяющий устанавливать необходимое передаточное отнощение между гибочным роликом 4 и накопительным барабаном 5, т. е. равное отношению радиуса остаточной кривизны того или иного участка деформированной проволоки к радиусу J pивизны, соответствующей гибочной поверхности ролика 4. Вариатор 6 позволяет регулировать скорость возвратно-поступательного движения конуса I2относительно конуса 11 и тем самым изменять щаг спиралевидной гибки и укладки витков. Реверсивный механизм, при помощи которого осуществляется изменение направления движения винта 13, состоит из зубчатых передач 18-22, электромагнитных муфт 23, 24 (фиг. 2) и взаимодействующих с флажком 25 двух бесконтактных выключателей 26, 27 (фиг. 2). Флажок 25 закреплен на винте 13, а выключатели 26, 27 установлены на направляющих 28, 29 с возможностью осевого Движения параллельно направлению движения винта 13. В описанном варианте моталки гибочный ролик 4 располагается перед вытяжным барабаном 1 по ходу движения проволоки, что позволяет достаточно больщие усилия гибки, но возможна также компоновка моталки с расположением гибочного ролика после вытяжного барабана I. Моталка работает следующим образом. Проволока, поступающая от волочильного стана или другого обрабатывающего ее устройства на вытяжной барабан 1, огибает гибочный ролик 4 под натяжением и приводит его во вращательное движение. Через предварительно настроенную посредством вариатора 17 кинематическую цепь, движение от гибочного ролика 4 передается накопительному барабану 5 и через поворотные рычаги 8 к фигурке 9. Проволока протягивается вытяжным барабаном 1 вокруг гибочного ролика-4 с постоянной скоростью. Сбегающая:с барабана 1 ветвь проволоки 30 опускается по спирали вокруг накопительного барабана 5 и укладывается по спирали с переменным, последовательно возврастающим или. убывающим, радиусом на вращающуюся фигурку 9. При включении привода 3 вытяжного барабана 1 через кинематическую цепь, связывающую барабан 1 с винтом 13, винту 13 и вместе с ним нижнему усеченному конусу 12 сообщается дви. жение. Конус 12, передвигаясь возвратнопоступательно по шлицевым направляющим вала 10 относительно верхнего усеченного конуса 11, вводит в контакт с проволокой различные участки рабочей поверхности гибочного ролика 4, благодаря чем проволока гнется по конической спирали. Так как фигурка 9 приводится во вращение от ролика 4, она вращается с переменной скоростью, чем обеспечивается соответствие между параметрами спиралевидной гибки и спиралевидной укладки проволоки. Проволока укладывается на фигурку 9 по спирали послойной с циклически изменяемым радиусом кривизны в принятом диапазоне. При протягивании проволоки вокруг гибочного ролика 4 она подвергается упруго-пластической деформации; Укладываемые на фигурку 9 витки проволоки за счет, имеющегося различия в частоте вращения гибочного ролика 4 и накопительного барабана 5, практически подвержены лишь пластической деформации. В связи с тем, о радиус остаточной кривизны подвергнутых гибке витков проволоки определяется не только радиусом гибочной поверхности 4, но и физико-механическими характеристиками принимаемого в моток металла, а также зависит от поперечного сечеНия проволоки, необходимое передаточное отношение механической передачи от гибочного ролика 4 к накопительному барабану 5 подбирается для кажого случая практически (визуально) посредством вариатора 17. При возвратно-поступательном движении винта 13 вместе с ним передвигается флажок 25, взаимодействующий с бесконтактными, выключателями 26, 27. По командам от выключателей 26, 27 посредство.м электромагнитных муфт 23, 24 производится переключение реверсивного механизма. Подвижный конус 12 гибочного ролика 4 изменяет направление своего осевого движения относительно неподвижного конуса 11, благодаря чему изменяется направление спиралевидной укладки витков проволоки на накопительной фигуре 9 от одного граничного значения диаметра мотка до другого. При помощи выключателей 26, 27 производится при необходимости изменение диапазона вводимой в контякт с проволокой гибочной поверхности ролика 4, для чего их передвигают по направляющим 28, 29 в новые положения. Изменение щага спиралевидной укладки витков проволоки на фигурке 9, величина которого определяется диаметром поп еречного сечения проволоки, а также необходимой плотностью укладки витков производится посредством вариатора 6. Предлагаемая моталка позволяет за счет предварительной спиралевидной деформации принимать в мотки высокопрочную проволоку, что позволит расширить ее технологические возможности. Оснащение моталки устройством для изменения диапазона радиуса гибки проволоки и использование в кинематических .цепях привода гибочного ролика и накопительного барабана вариаторов, а также выполнение рабочей поверхности гибочного ролика с изменяющимся радиусом кривизны позволяет переналаживать ее для приема в мотки проволоки, отличающейся как размерами поперечного сечения, так и и механическими характеристиками. В связи с тем, что, в данной моталке придание виткам спиралевидной формы осуществляется посредством спиралевидной гибки и укладки проволоки, отпадает необходимость в средствах автоматической системы регулирования укладочного механизма, чем значительно упро1цается конструкция. Кроме того укладка в моток проволоки, неподверженной упругой деформации, позволяет получать плотные тяжеловесные и устойчивые по форме мотки проволоки. Формула изобретения 1. Моталка, содержащая установленные вытяжной и накопительный барабаны и кинематически связанный с вытяжным барабаном механизм для укладки в мотки проволоки по спирали Архимеда, отличающаяся тем, что, с целью упрощения конструкции и расширения технологических возможностей, механизм для укладки в мотки проволоки выполнен в виде гибочного ролика и связывающих гибочный ролик с накопителем, регулятора скорости изменения радиуса гибочной поверхности ролика и регулятора выбора диапазона гибки. 2.Моталка по п. 1, отличающаяся тем, что регулятор выбора диапазона гибки выполнен в виде форматора и передачи, имеющей реверсивный механизм, и связывающей выточенный барабан с гибочным роликом, а также гибочный ролик с наполнителем. 3.Моталка по п. 1, отличающаяся тем, то, с целью обеспечения возможности прима в мотки проволоки с различными поепСчными сечениями и механическими хаак еристиками, в регуляторе скорости изменрния радиуса гибочной поверхности ролика установлены вариаторы. 4. Моталка по п. 1, отличающаяся тем, что гибочный ролик выполнен в виде двух, установленных соосно на одном валу, усеченных конусов, один из которых установлен неподвижно в осевом направлении, а другой - с возможностью осевого возвратнопоступательного движения во внутрь неподвижного, причем конические поверхности конусов выполнены пазами и соответствую щими этим пазам выступами. Источники информации, принятые во внимание при экспертизе 1,. Патент ГДР № 40540, кл. 7 В 5/01, 15.06.63. 2. Авторское свидетельство СССР № 410847, кл. В 21 С 4/04, 20.07.71 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Моталка | 1977 |
|
SU698693A1 |
| Устройство для укладки проволоки в мотки | 1977 |
|
SU733763A1 |
| Устройство для укладки проволоки в мотки | 1984 |
|
SU1196065A1 |
| Устройство для смотки сортового профиля | 1983 |
|
SU1144741A1 |
| Моталка | 1977 |
|
SU940897A1 |
| Моталка для непрерывного съема проволоки с многоблочного волочильного стана | 1984 |
|
SU1228937A2 |
| Устройство для укладки проволоки в мотки | 1986 |
|
SU1324703A1 |
| Съемник мотков проволоки | 1979 |
|
SU837451A1 |
| Устройство для формования и уплотнения мотка | 1978 |
|
SU743748A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ СПИРАЛЕЙ | 1993 |
|
RU2077404C1 |
V ™
11
Г2
/2W.J
П
(J
