М г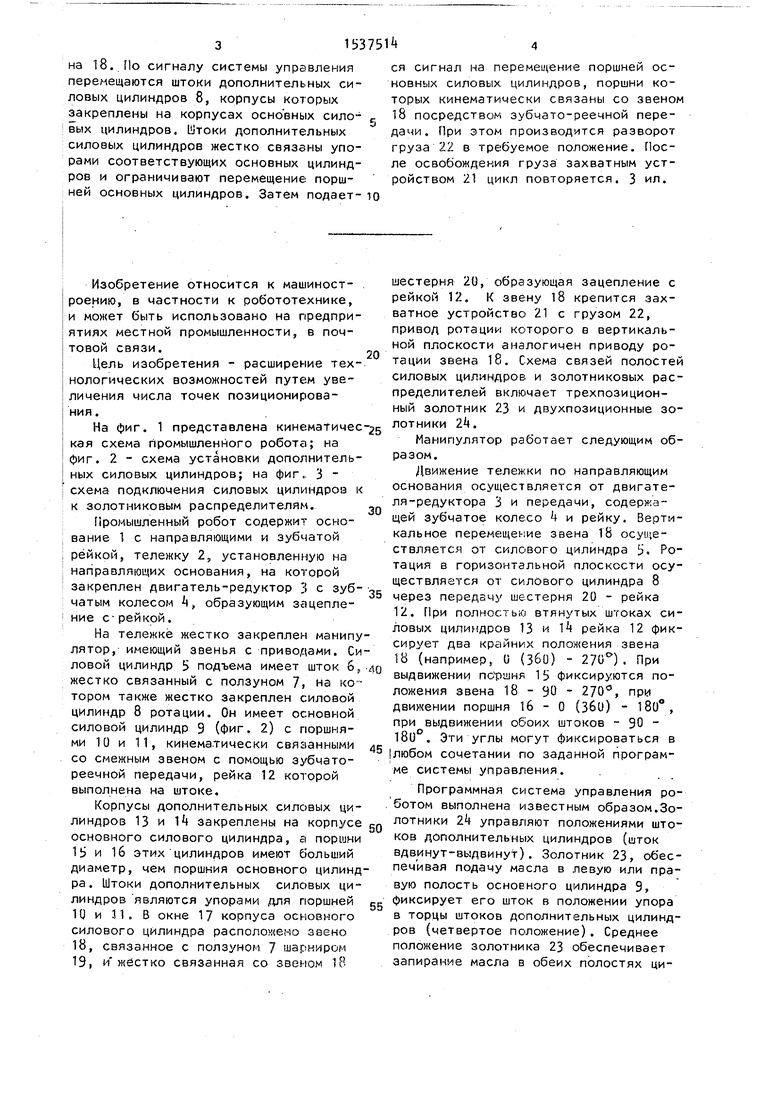
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU874330A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
| Промышленный робот | 1978 |
|
SU874328A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Промышленный робот | 1979 |
|
SU863330A1 |
| Модуль промышленного робота | 1986 |
|
SU1335454A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано на предприятиях местной промышленности, в почтовой связи. Цель изобретения - расширение технологических возможностей путем увеличения числа точек позиционирования. Промышленный робот содержит основание 1, тележку 2 и звенья с приводами, выполненными в виде силовых цилиндров и зубчато-реечных передач. После перемещения тележки 2 и штока 6, обеспечивающих вывод захватного устройства 21 в требуемую точку пространства, в работу включается привод звена 18. По сигналу системы управления перемещаются штоки дополнительных силовых цилиндров 8, корпусы которых закреплены на корпусах основных силовых цилиндров. Штоки дополнительных силовых цилиндров жестко связаны упорами соответствующих основных цилиндров и ограничивают перемещение поршней основных цилиндров. Затем подается сигнал на перемещение поршней основных силовых цилиндров, поршни которых кинематически связаны со звеном 18 посредством зубчато-реечной передачи. При этом производится разворот груза 22 в требуемое положение. После освобождения груза захватным устройством 21 цикл повторяется. 3 ил.
2/
I:К.гг
Фиг.1
на 18. По сигналу системы управления перемещаются штоки дополнительных силовых цилиндров 8, корпусы которых закреплены на корпусах основных сило- вых цилиндров. Штоки дополнительных силовых цилиндров жестко связаны упорами соответствующих основных цилиндров и ограничивают перемещение поршней основных цилиндров. Затем подает-
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано на предприятиях местной промышленности, в почтовой связи.
Цель изобретения - расширение технологических возможностей путем увеличения числа точек позиционирования .
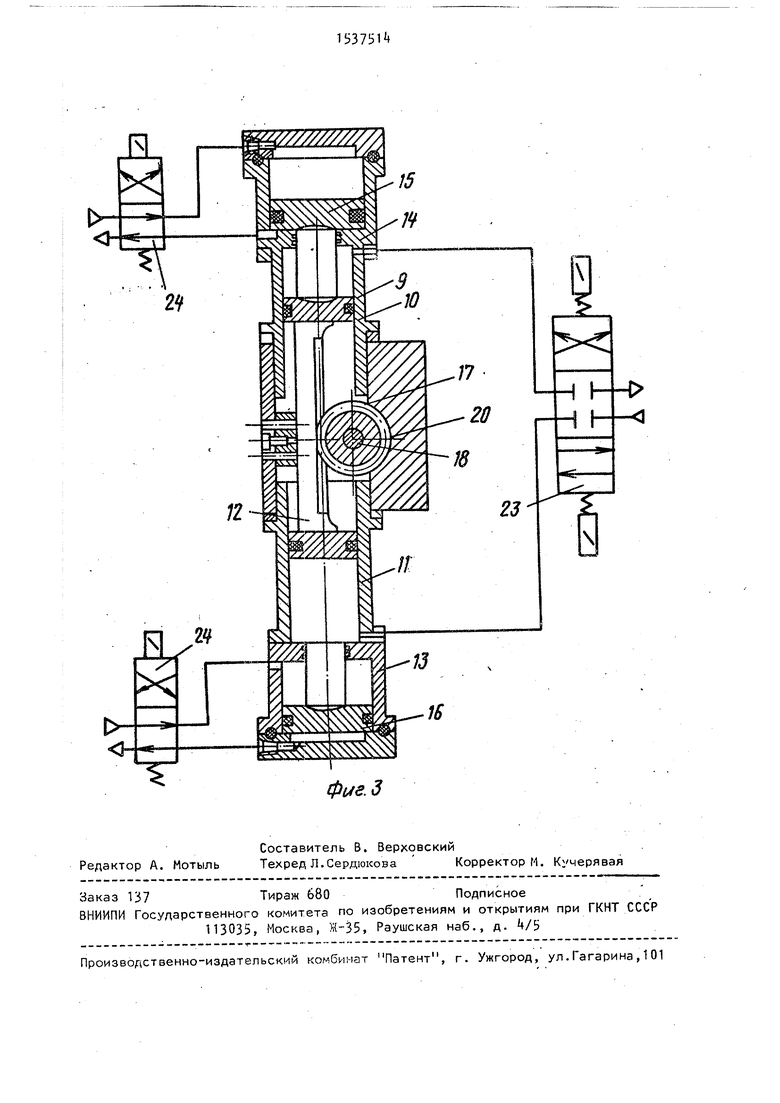
На фиг. 1 представлена кинематическая схема промышленного робота; на фиг. 2 - схема установки дополнительных силовых цилиндров; на фиг,, 3 - схема подключения силовых цилиндров к к золотниковым распределителям.
Промышленный робот содержи основание 1 с направляющими и зубчатой рейкой, тележку 2, установленную на направляющих основания, на которой закреплен двигатель-редуктор ; с зубчатым колесом ), образующим зацепление с-рейкой.
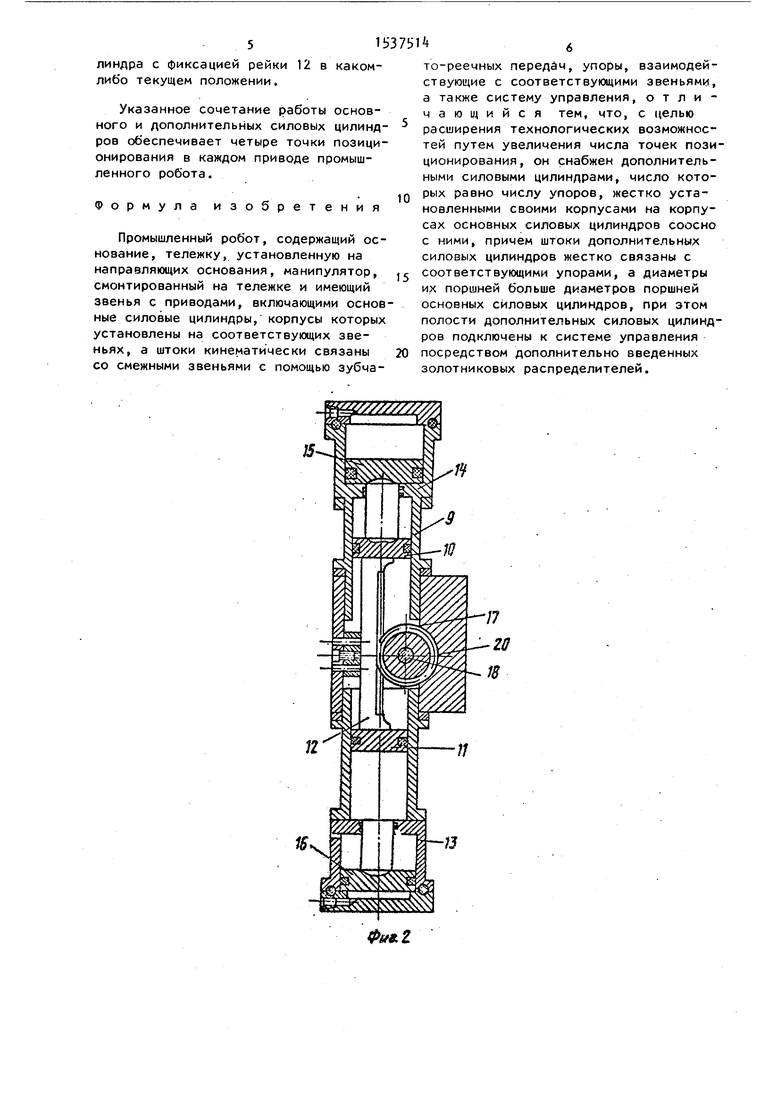
На тележке жестко закреплен манипу лятор, имеющий звенья с приводами. Си ловой цилиндр 5 подъема имеет шток 6, жестко связанный с ползуном 7, на котором также жестко закреплен силовой цилиндр 8 ротации. Он имеет основной силовой цилиндр 9 (фиг. 2} с поршнями 10 и 11, кинематически связанными со смежным звеном с помощью зубчато- реечной передачи, рейка 12 которой выполнена на штоке.
Корпусы дополнительных силовых цилиндров 13 и 1 закреплены на корпусе основного силового цилиндра, а поршни 1 з и 16 этих цилиндров имеют больший диаметр, чем поршкия основного цилинд ра. Штоки дополнительных силовых цилиндров являются упорами для поршней 1Q и 31. В окне 17 корпуса основного силового цилиндра расположено звено
18,связанное с ползуном 7 шарниром
19,и жёстко связанная со звеном 18
ся сигнал на перемещение поршней основных силовых цилиндров, поршни которых кинематически связаны со звеном 18 посредством зубчато-реечной передачи. При этом производится разворот груза 22 в требуемое положение. После освобождения груза захватным устройством 21 цикл повторяется. 3 ил.
0
5
0
5
О
45
0
55
шестерня 20, образующая зацепление с рейкой 12. К звену 18 крепится захватное устройство 21 с грузом 22, привод ротации которого в вертикальной плоскости аналогичен приводу ротации звена 18. Схема связей полостей силовых цилиндров и золотниковых распределителей включает трехпозицион- ный золотник 2.3 и двухпозиционные золотники 2.
Манипулятор работает следующим образом.
Движение тележки по направляющим основания осуществляется от двигателя-редуктора 3 и передачи, содержащей зубчатое колесо t и рейку. Вертикальное перемещение звена 18 осуществляется от силового цилиндра У, Ротация в горизонтальной плоскости осуществляется от силового цилиндра 8 через передачу шестерня 20 - рейка 12. При полностью втянутых штоках силовых цилиндров 13 и 1 рейка 12 фиксирует два крайних положения звена 18 (например, (J (3&0) - 270°). При выдвижении по ршня 15 фиксируются положения звена 18 - 90 - 270е, при движении поршня 16 - 0 (ЗбО) - 180°, при выдвижении обоих штоков - 90 18U . Эти углы могут фиксироваться в любом сочетании по заданной программе системы управления.
Программная система управления роботом выполнена известным образом.Золотники 2k управляют положениями штоков дополнительных цилиндров (шток вдвинут-выдвинут). Золотник 23, обеспечивая подачу масла в левую или правую полость основного цилиндра 9, фиксирует его шток в положении упора в торцы штоков дополнительных цилиндров (четвертое положение). Среднее положение золотника 23 обеспечивает запирание масла в обеих полостях ци5153751
линдра с фиксацией рейки 12 в каком- либо текущем положении.
Указанное сочетание работы основного и дополнительных силовых цилинд- 5 ров обеспечивает четыре точки позиционирования в каждом приводе промышленного робота.
Формула изобретения
Промышленный робот, содержащий основание, тележку, установленную на направляющих основания, манипулятор, 5 смонтированный на тележке и имеющий звенья с приводами, включающими основные силовые цилиндры, корпусы которых установлены на соответствующих звеньях, а штоки кинематически связаны 20 со смежными звеньями с помощью зубча
0
5
то-реечных передач, упоры, взаимодействующие с соответствующими звеньями, а также систему управления, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения числа точек позиционирования, он снабжен дополнительными силовыми цилиндрами, число которых равно числу упоров, жестко установленными своими корпусами на корпусах основных силовых цилиндров соосно с ними, причем штоки дополнительных силовых цилиндров жестко связаны с соответствующими упорами, а диаметры их поршней больше диаметров поршней основных силовых цилиндров, при этом полости дополнительных силовых цилиндров подключены к системе управления посредством дополнительно введенных золотниковых распределителей.
Я
Ф(8.1
О
фиг.З
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| Машиностроение, 1983, с | |||
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
| ( ПРОМЫШЛЕННЫЙ РОБОТ | |||
