1
Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства при использовании автооператоров для загрузки и выг эузки станков деталями типа валов.
Известен захват; содержащий шарнирно связанные с механической рукой рычаги с губками 1 .
Однако он не обеспечивает надежного удержания изделия.
Цель изобретения - повышение надежности захватывания изделия.
Поставленная цель достигается тем, что захват снабжен замком, выполненHfcjvi в виде подпружиненных пластин, расположенных на осях шарниров, а в корпусе руки выполнены пазы под рычаги и пластины.
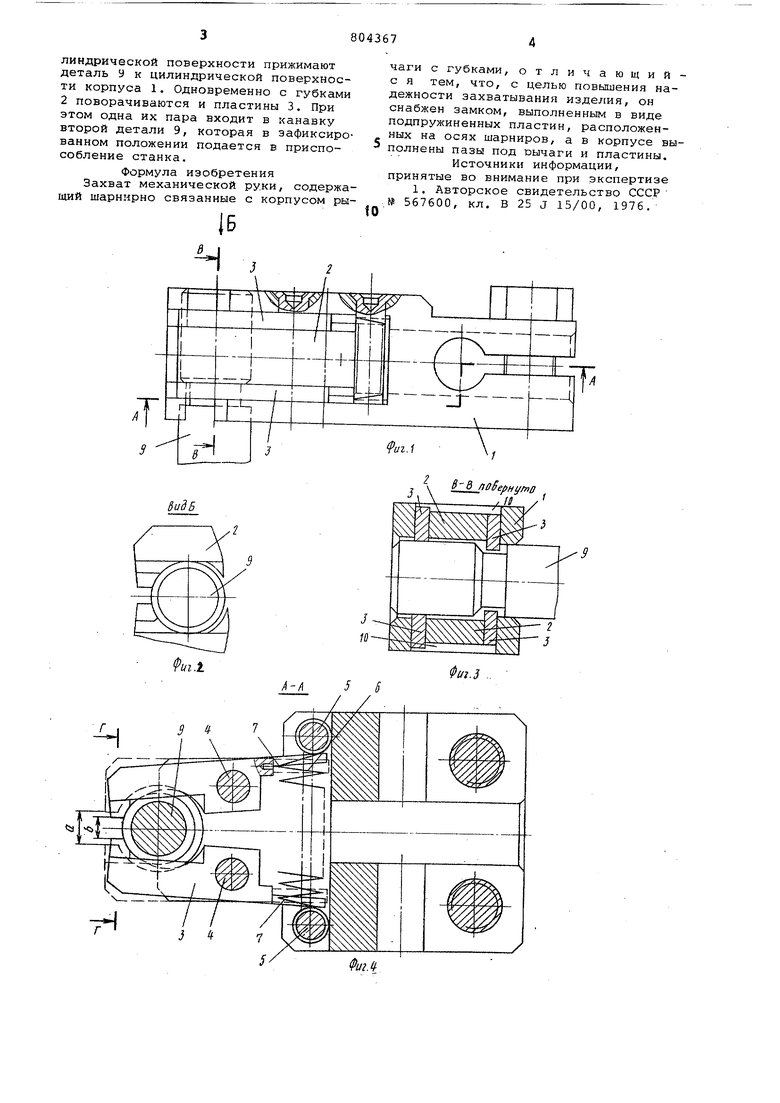
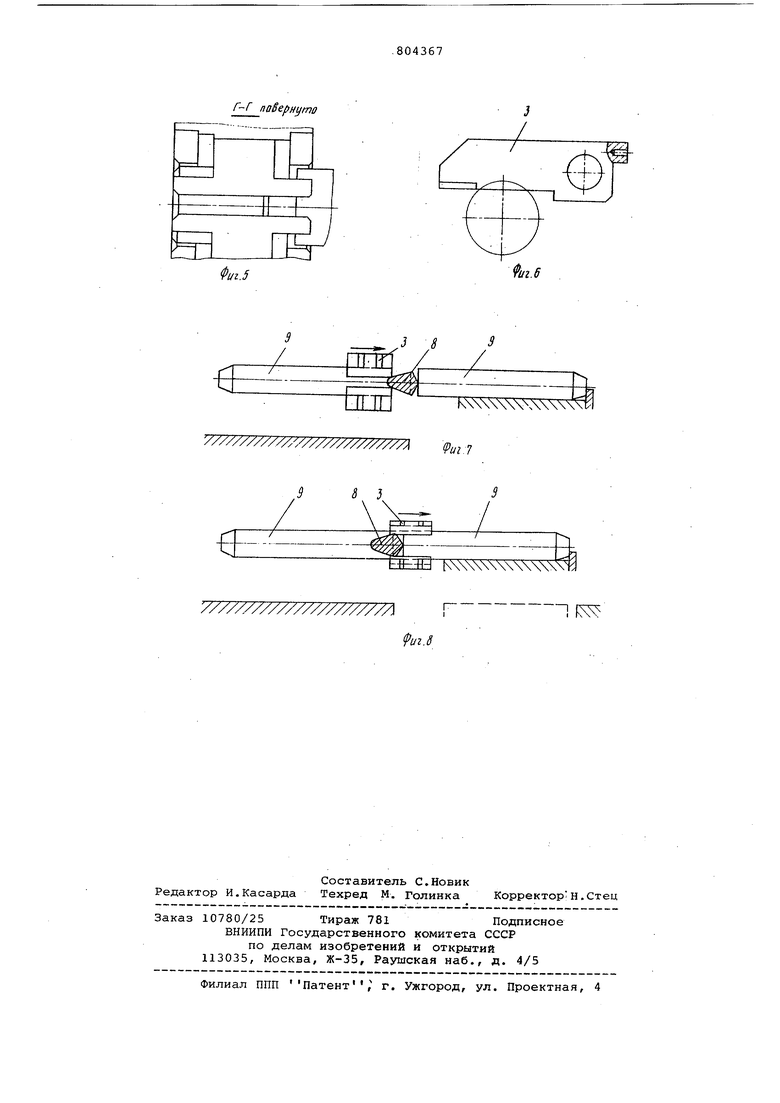
На фиг. 1 схематически изображен захват, общий вид; на фиг. 2 -: вид Б на фиг. 1; на фиг. 3 - разрез В-В на фиг. 1; на фиг. 4 - разрез А-А на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 4; на фиг. 6 - пластина замка; на ф:лг. 7 - момент работы захвата (в захвате левая деталь); на фиг. 8 .то же (в захвате правая деталь).
Захват содержит корпус 1, рычаги с губками 2, пластины 3 замка, оск
4, на которых шарнирно установлены рычаги и пластины 3 замка, упоры 5, .пружины 6 и 7 и кулачок 8. Захват предназначен для удержания деталей 9. В корпусе 1 выполнены пазы 10 под рычаги с тубками 2 пластины 3 замка. Рь1чаги с губками 2 прижаты к упорг м 5 при помощи пружин 6. Пластины 3 подпружинены относительно упоров 5
0 пружинами 7. Пластины 3 замка расположены попарно с двух сторон каждой губки 2.
Захват работает следующим образом.
При движении захвата с деталью 9
S раскрываются при помощи острого угла кулачка 8 губки 2. Поворачиваясь вокруг осей 4, они поворачивают пластины 3. В раскрытом состоянии губок 2 и замка захват перемещается на вторую деталь 9, а первая деталь 9, находив0шаяся в нем, выталкивается плоским уступом кулачка.8 (плоский уступ кулачка 8 изображен пунктиром). Закрытие губок 2 и.замка происходит при проходе тупого угла кулачка 8. При
5 этом пружина б поворачивает губки 2, а пружины 7 - пластины 3 замка вокруг осей 4. Вторая деталь 9 оказывается зажатой и зафиксированной в захвате. Губки 2 своим участком ци0
линдрической поверхности прижимают деталь а к цилиндрической поверхности корпуса 1. Одновременно с губками 2 поворачиваются и пластины 3. При этом одна их пара входит в канавку второй детали 9, которая в зафиксированном положении подается в приспособление станка.
Формула изобретения Захват механической руки, содержащий шарнирно связанные с корпусом рычаги с губками, отличающийс я тем, что, с целью повышения надежности захватывания изделия, он снабжен замком, выполненным в виде подпружиненных пластин, расположенных на осях шарниров, а в корпусе выполнены пазы под оычаги и пластины.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР .№ 567600, кл, В 25 J 15/00, 1976.
Вид Б
2
7 & JioSe6Hi//r,p - 41 /
Ригг
/)-Л
Фиг.З
Фиг Л
naSepHijmo
h:
Фи1.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1980 |
|
SU891327A2 |
| ЗАХВАТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ЗАХВАТЫВАНИЯ И ПЕРЕМЕЩЕНИЯ ПЛОСКИХ ПРЕДМЕТОВ | 2007 |
|
RU2428366C2 |
| АППАРАТ ДЛЯ СШИВАНИЯ КРОВЕНОСНЫХ СОСУДОВ | 1947 |
|
SU71792A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Захват | 1977 |
|
SU663577A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Захват | 1977 |
|
SU667396A1 |
| МАШИНА ДЛЯ ОБВЯЗЫВАНИЯ ТЮКОВ ПОЛОСОВЫМ ЖЕЛЕЗОМ | 1930 |
|
SU38583A1 |
| Захват | 1981 |
|
SU984862A1 |
| Устройство для намотки секций рулонных конденсаторов | 1979 |
|
SU788202A1 |
/////////////////A
///////////////////////}
f
