(54) СЖАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1987 |
|
SU1511114A1 |
| Устройство для зажима инструмента в шпинделе | 1983 |
|
SU1113218A1 |
| Схват | 1986 |
|
SU1335450A1 |
| Транспортный ротор для перемещенияшТучНыХ издЕлий | 1979 |
|
SU841907A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Тиски | 1987 |
|
SU1497114A1 |
| Захватное устройство | 1988 |
|
SU1650432A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Устройство для формированияиздЕлий "МюзлЕ | 1977 |
|
SU816637A1 |
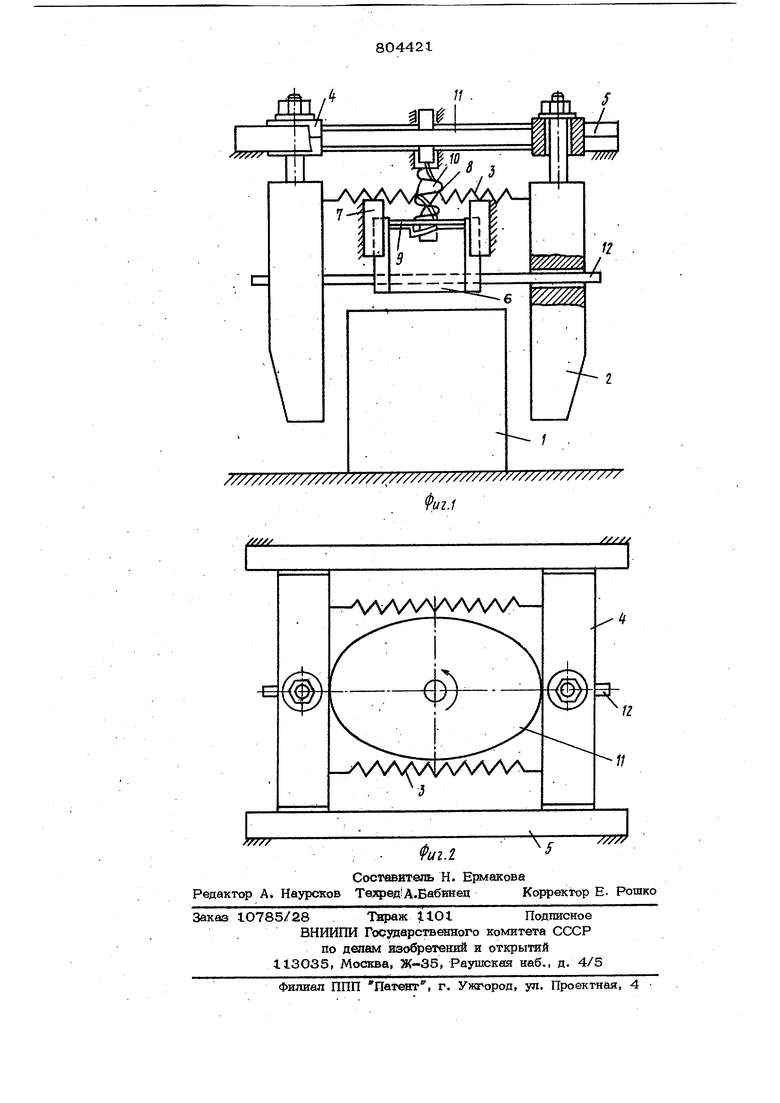
Изобретение относится к захватным органам щюмышпенных роботов и манн-: пупяторов. Известно захватное устройство, содержещее установленные в корпусе сводшоиес губки, связанные с плоским кулачковым механизмом, кулачок которого посредством оси соединен с приводом поворота|l Недостатюм этого устройства, является необходимость применения индивидуального привода кулачка. Целью изобретения является обеспечение автондалности работы устройства. У саэанная цель достигается тем, что губка в устройстве установлены с возможностью перемещения в направлении, параллельном оси кулачка, а привод повдро га выполнен в виде расположенного между губок подвижного в направлении, перпендикулярном направлению сведения губок стакана, на внутреннем торце которо1ч выполнены скошенные в одну сторону че тыре равномерно расположенные паза, и установленной .с возможностью поворота подгфужиненной к внутренн лу торцу стакана соосной ему цилиндрической шайбы со скошенными в одну сторону двумя зубьями на обращенном к стакану торце и со сквозным прямоугольным тием в центре, при этом ось кулачка выполнена в виде закрученной в спираль полосы прямоугольного сечения, находящ ся в контакте с отвертием шайбы. На фиг. 1 схематически изображен предлагаемый схват; на фиг. 2 - то же вид сверху. Для захвата объекта I схват содержит свод5шшеся губки 2, соединенные между собой двумя пружинами 3 и установленные с возможностью их перемещения в ползунах 4 и направляющих 5. Между губками расположен их привод, состоящий из стакана 6, имеющего возможность Ьоэвратно-поступательного перемещения по направляющим 7. К внутреннему торцу стакана, имеющему скошенные в одну сторону пазы, располож«1ные через 9О по окружности, с помощью пружины 8 поджата цилиндрическая шайба 9 с двумя диаметрально расположенными зубь5сми, профиль Которых аганалогичен пазам стакана. В прямоугольное отверстие шайбы 9 пропущена закручен-. БИЯ Б спираль ось 10 кулачка И. В стакане 6 жестко установлена штанга 12, концы ко TopoR свободно пропущены в отверстия, выполненные в губках 2. Охват р юотает следующим образом. Для захватьшания объекта I он должен быть помшген между губкшн 2i после чего происходит опускание схвата. При соприкосновении объекта t сЙГстаканом 6 последний движется по направляющим 7, а губки 2 синхронно перемещаются в ползунах 4. При перемещении стакана 6 вверх вместе с ним поступательно движется шайба 9, -так как она подпружинена пружиной 8 и имеет силовое замыкание со стаканом 6 при помоши двух зубьев; входящих в пазы стакана. Движение шайбы вверх вызывает вращение оси 1О и кулачка II благодаря наличию в шайбе 9 прямоугольного отверстия, в кртррре входит ось 1О. Движение стакана прекращается, когда штанга 12 дойдет до упор в направляющие 7, что будет соответство вать повороту кулачка на 90° и захваты 4. губками 2 с помощью ванию объекта пружин 3. После этого схват поднимается для переноса объекта на тpeбyevIyю позицию. При этом происходит опускание губок 2 и стакана б вместе с объектом I под действием силы тяжести. Одновременно шай ба 9 перемацается вращатеяьно- оступательно вниз по оси 10 благодаря скосу зубьев, что дает возможность кулачку оставаться в неподвижному состоянии, а шайбе 9 развернуться относительно стака на 6 на 90° , причем зубья шайбы западают в пазы стакана в конце его хода. При опускании схвата и соприкосновении объекта I с базовой поверхностью начинается процесс движения стакана 6 вверх, сятерация поворота кулачка It на 90 повторяется, что приводит к разведению губок 2 иосвобождению объекта. Предлагаемый схватвыгодного отличается от известных автономией работы и своей простотой, небольшими габаритами и надежностью в работе. Отсутствие датчиков обратной связи, управляющих работой свата, позволило избежать применения сложной схемы управления движением губок. Ко1ютрукция схвата позволяет без особых трудностей менять губки в зависимости от конфигурации схватываемых . объктов. Формула изобретения Схват содержащий установленные в корпусе сводящиеся губки, связанные с плоским кулачковым механизмом, кулачок ко-, торого посредством оси соединен с приводом поворота, отличающийся тем, что, с целью обеспечения автономности работы, губки , установлены с возможностью перемещения в направлении, параллельном оси кулачка, а привод поворота вьтолнен в виде расположенного между губок подвижного в направлении, перпендикулярном направлению сведения губок, стакана, на внутреннем торце которого выполнены скошенные в одну сторону четьфе равномерно расположенные паза, и установленной с возможностью поворота подпружиненной к внутреннему торцу стакана соосной ему цилиндрической шайбы со скошенными в одну сторону двумя зубьями на обращенном к стакану торце и со сквозным прямоугольным отверстием в центре, при этом ось кулачка выполнена в виде закрученной в спираль полосы прямоугольного сечения, находящейся в контакте с отверстием шайбы. Источники информации, принятые во внимание при экспертизе I. Кожевников С Н. и др. Элементы механизмов. М-, Машиностроение 1956, с. 730.
